Please help doing a project and trying to improve my skills with this new robot kit
i got with a few sensors (Robot: Magician Chassis Robot)
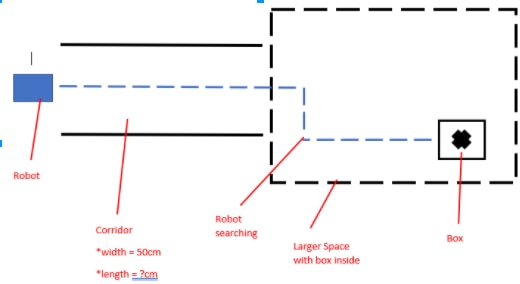
Task: make a robot that passes through a corridor first with a width of 50cm that then enters a larger space where the robot must search and find a box
Sensors: ultrasonic and IR sensor
I have managed to get the robot to pass through the corridor without touching the corridors by attaching ultrasonic sensors on each side of the robot
but now I am trying to get the robot to search and find the box after it first enters the larger area I was told this might be a "collection of distances" problem
but I have no idea what that means and how I would go about programming or creating an algorithm (easy flowchart) for
Please help thank you !!