Hi all,
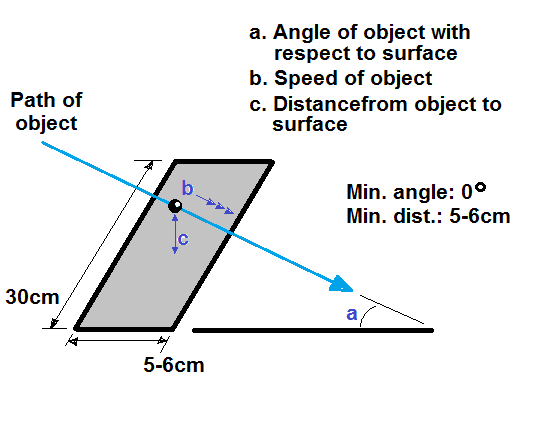
I am discussing a possible project, but I am not certain how feasible it is. The project consists of using an Arduino, plus some sensor (or sensors) to measure the speed, angle and height of a flying object over a 6 x 30 cm surface. Although I am unfamiliar with the details, the object will pass over the surface and the Arduino needs to get how fast it is moving, the angle at which it crosses the surface and the distance from the surface to the object.
I posted a rough sketch below.
Can some one please provide some feedback as to how feasible this is and what sort of sensor(s) will be needed? Thanks! Salvador