


BeagleBone Blue - Drive Motor and Steering Servo Tests
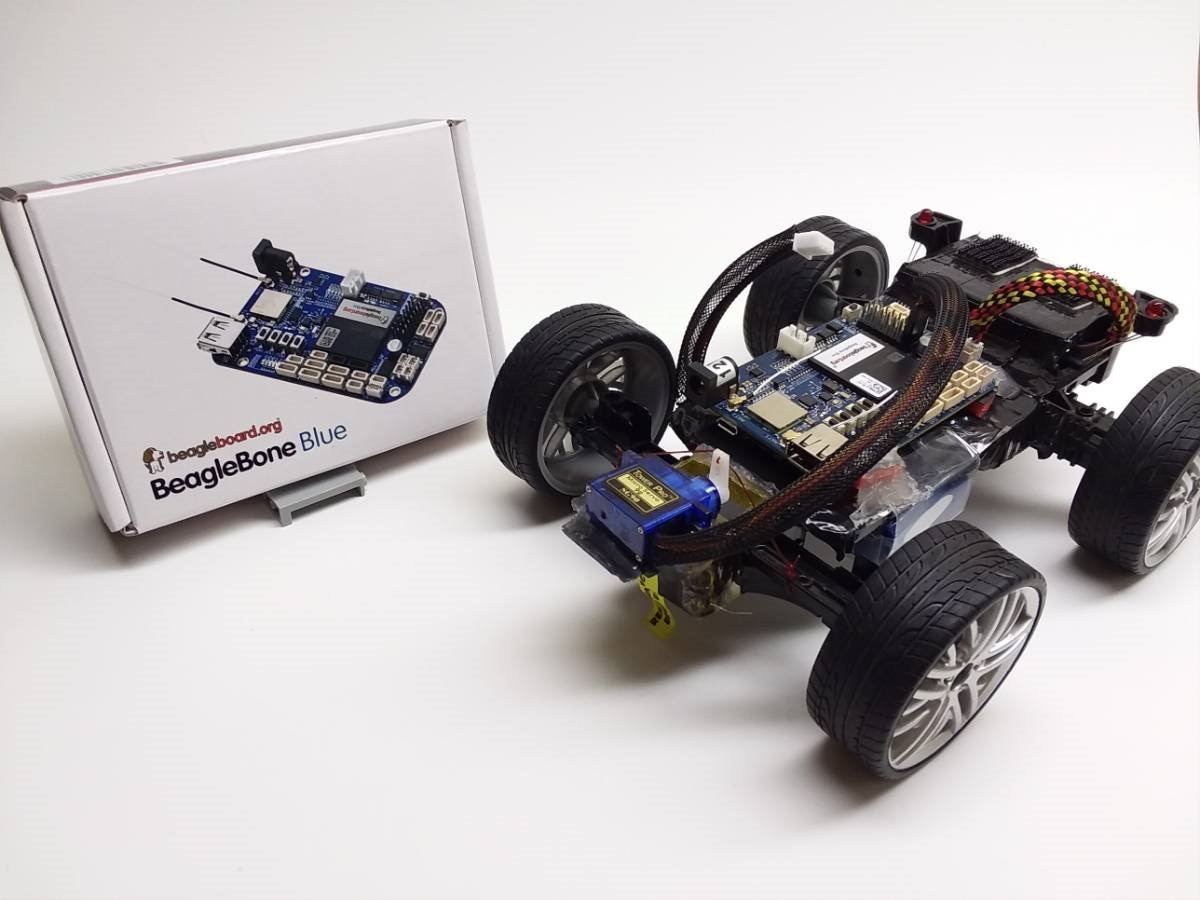
The BeagleBone Blue is ready to go. https://beagleboard.org/blue
Available at http://www.newark.com/beagleboard/bbone-blue/beaglebone-blue-robotics-platform/dp/95Y0640?st=beaglebone%20blue

Front View of the BB Blue RTV (Road Test Vehicle)

Side View
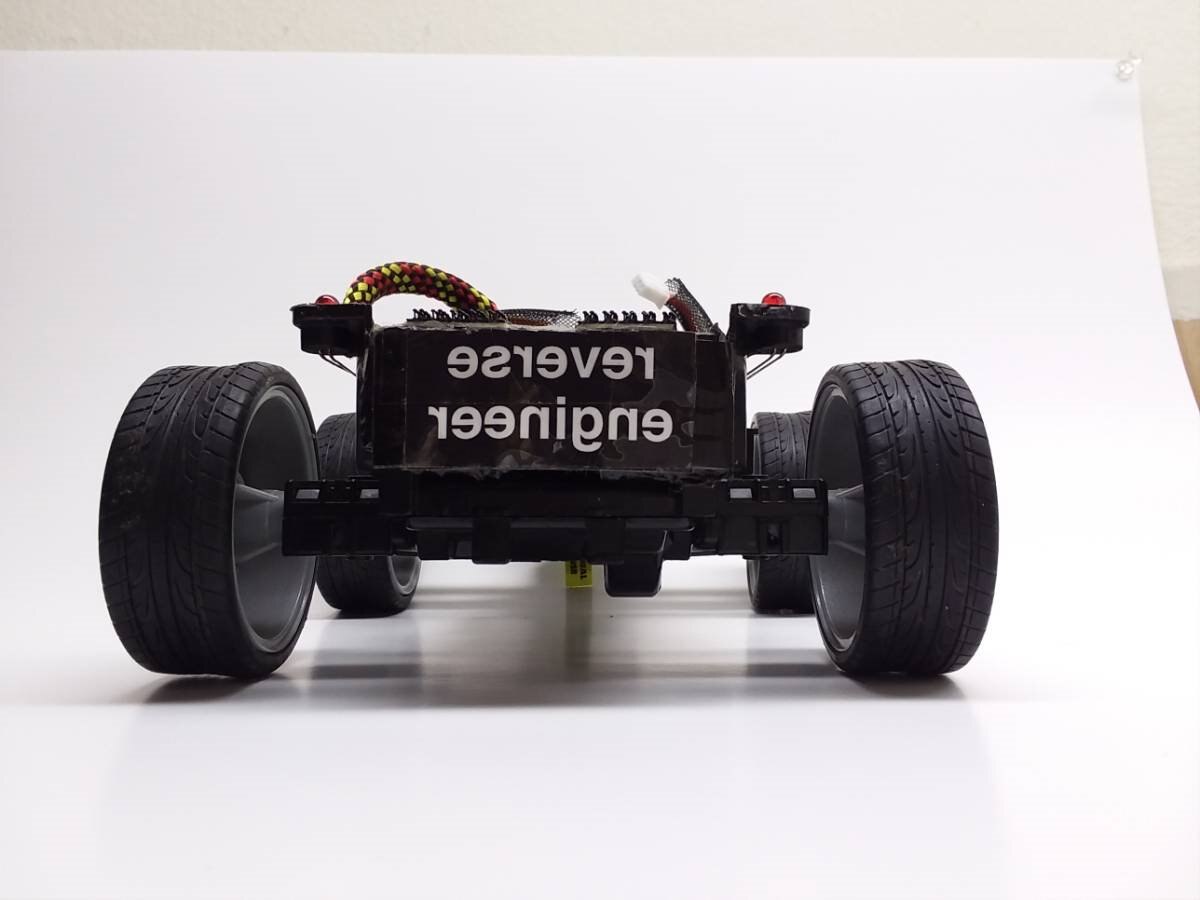
Rear View

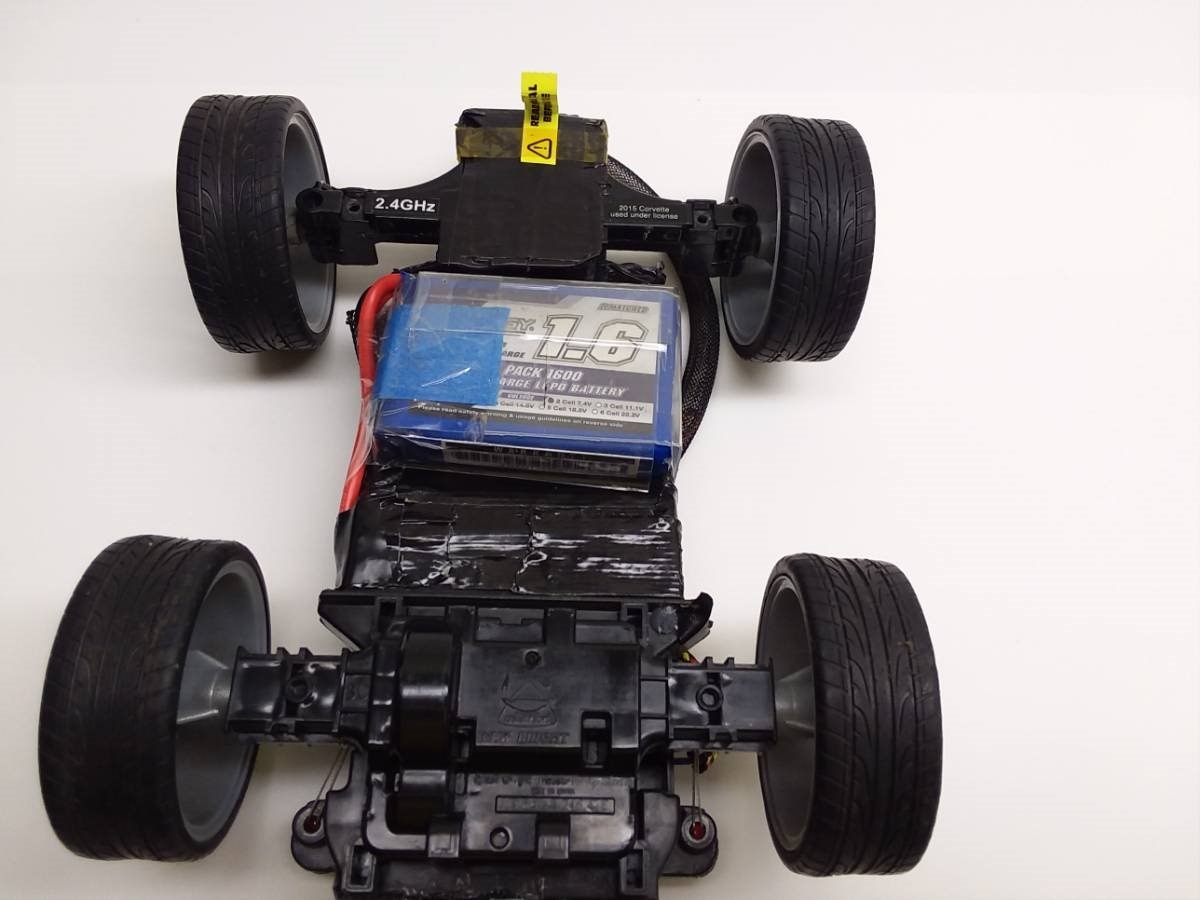
Top View.
Bottom View.

The motor is powered directly from the BB Blue via 2-Pin JST-ZH Connector.
The cable for the steering servo is also connected to the BB Blue.

Conversion of the steering mechanism was an interesting challenge.
Testing
This BB Blue is running the latest Debian Strech IoT Image and the Robotics hardware API (libroboticscape).
https://beagleboard.org/latest-images
http://www.strawsondesign.com/#!manual-install
The following tests were performed with the vehicle elevated on a stand.
Steering Servo Test
Drive Motor Sweep Test at 0.3 motor duty.
Drive Motor Sweep Test at 0.5 motor duty.
Drive Motor running at 0.3 and 0.5 duty. Short pause between tests.
Torque from motor at 0.5 knocks vehicle from stand.
Drive Motor running at 0.5 and 1.0 duty, 100% BeagleBone Power.
Thanks for stopping by. Stay tuned for updates.
Trent
Top Comments