


Plan
My road test of the TMC5161-EVAL-KIT by Trinamic is two fold. Firstly to confirm that the setup can accurately and repeatedly step to the required position. Secondly to look at the setup under stall conditions.
Accurate Stepping
To measure accurate stepping the stepper motor will be used to raise a weight on a string. The position of the weight will be recorded and a sequence of steps run to move the weight up and down and to confirm it returns to the desired locations. This can be repeated at different speeds. If the encoder data is available this can be used as a comparison.

Stall Detection
The same test rig can be used for the stall detection with an increased load and/or increased drum diameter.
Test Rig
I was planning on the kit taking a week or so to turn up so I could build the test rig before it arrived. But it was promptly delivered after the road test winners were announced so I still need to build my rig. I've got a long length of aluminium extrusion that used to be part of a desk. That has a T-Slot which I will be using to attach the test to.
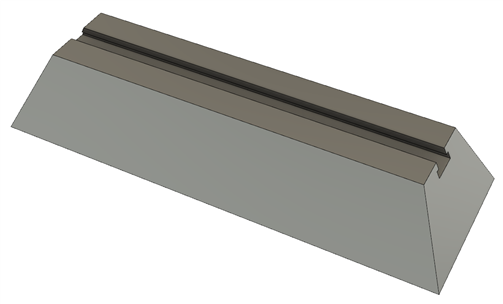
There are a few things to make for the test rig. The some pulleys, a motor mount and a bearing mount. The idea is to have a continuous length of string around the two pulleys with a spring so that it is always tight. This will make measuring the position more straightforward. A weight can then be attached to the string to provide a load. I am hoping that the current limit can be set very small so that the torque test can be done with a small amount of weight.
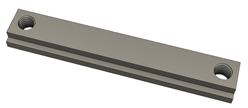
To mount the motor onto the extrusion, I plan to use a big angle plate and a tnut which I'll likely from a steel bar and some flange nuts I have to hand. A smaller plate will be used for the bearing end. The pulleys will be 3D printed as I don't have anything of the right dimensions in the workshop and that will alllow me to mount them straight onto the motor shaft.

Wiring the dev kit
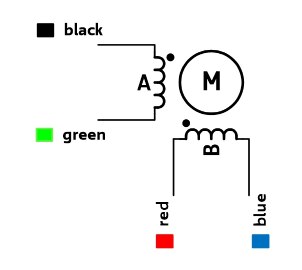
One of the first things I noticed on the stepper motor was that there were no instructions on wiring the motor. Luckily I found the motor data sheet which had the details of the wiring. For these bipolar motors it is also possible to test the wiring using a multimeter as there are simply two pairs of disconnected coils. Then you just have to experiment to see which way around the coils go. The board is labelled A1,A2, B1,B2. It doesn't matters which way around the pairs wired as long as the two are wired consistently. So I'll go with DOT being 1, i.e. Black wire to A1 and Red is B1.
Refering to the driver data sheet, it specifies a minimum motor voltage of 2 x CoilNom. The motor data sheet has a "rated voltage" so the minimum voltage should be 2 x 2.3v = 4.6v. It also specifies that the optimim is between 4 and 22 times the nominal voltage. So that's 9.2v for this motor. There is a section on how to tell if the voltage is too low so I'll start out at 9v and go from there.
Software
I downloaded and installed the TMCL-IDE, this needed Admin rights to instal on my windows 10 desktop, presumably because it loaded a driver for the board. There are lots of instructions that say start things up with the power supply turned off. So I'll do that. There also seems to be a "emulate" option which could be useful if you did not yet have the kit.
https://www.trinamic.com/support/software/
What's next
I'll likely give the motor a simple test before putting it on the rig so I know it's running correctly. Then I'll get everything put together for the first test.
Top Comments