


This is a next blog from the Road-Test Part2 MyIoT: Infineon Shield2Go Boards for IoT - Review
Installing DAVE4.0
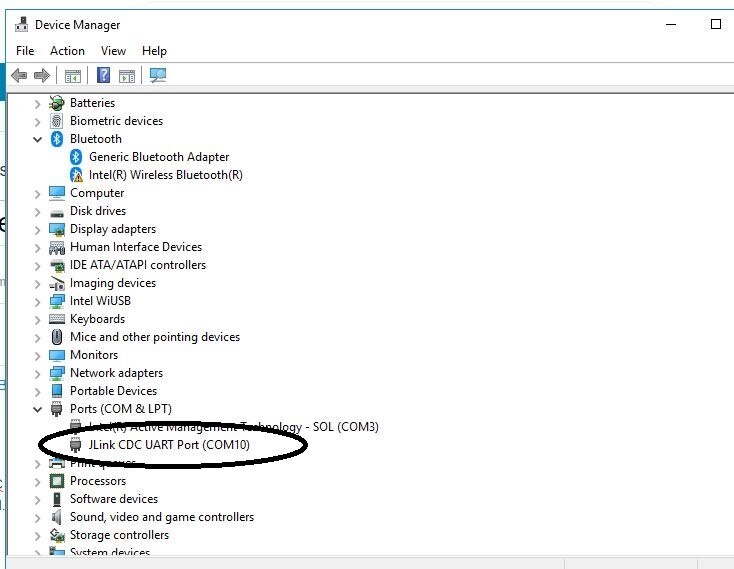
DAVE is a professional development platform for XMC microcontrollers from Infineon. It uses the the Eclipse IDE and is loaded with different software examples. I also tested the Infineon Memtool 4.7 for testing board connectivity. There are also some other tests which can be done with this tool. To start with DAVE4.0 make sure connection to the Jlink CDC UART exists else the DAVE tool also installs the driver automatically
Starting with DAVE and exploring the DAVE Eclipse IDE
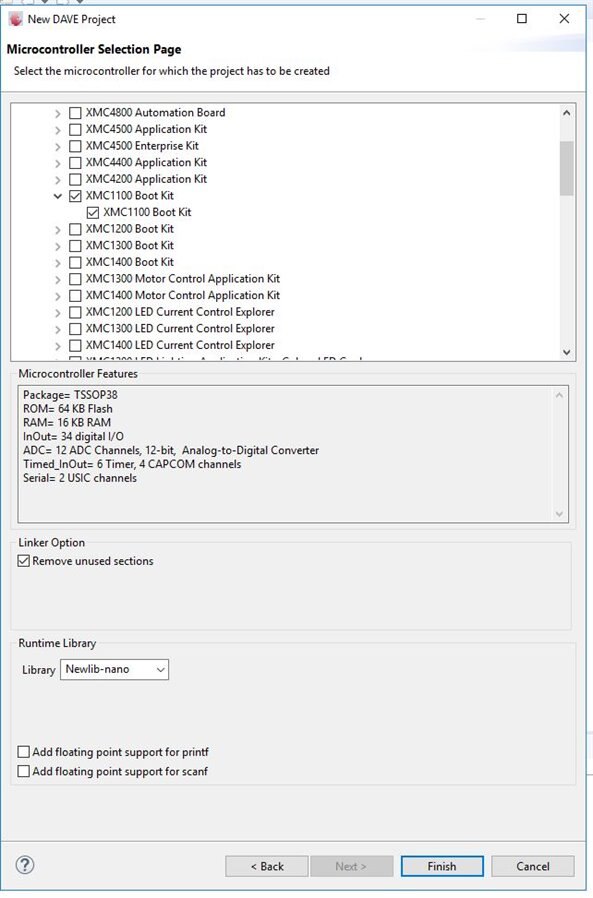
LED BlinkyTest with Dave4.0 and XMC1100 BootKit
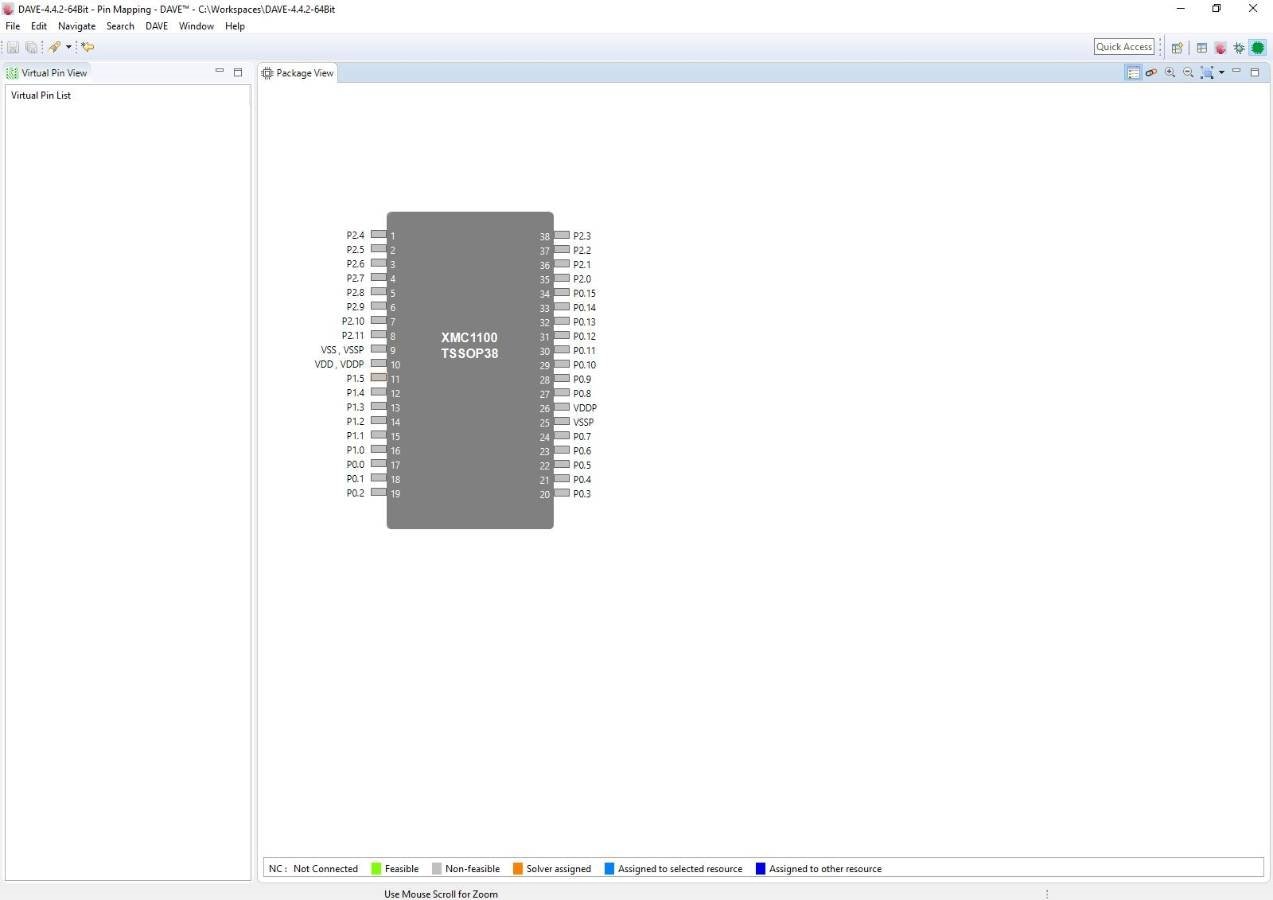
The Dave4.0 is easy to use tool if one is familiar with the Eclipse work flow. Here one can how DAVE4.0 works. I modified the LED code for blinking other LEDS on board as well.
LED Testing with the XMC1100 Bootkit and DAVE4.0
Working with Arduino UNO and S2Go sensors
Since the XMC1100 bit kit is designed for Arduino it fits perfectly to the Arduino UNO dev board and can be programmed. All the libraries for S2Go sensors are in here in Github.

 WARNING: Although the S2Go sensors should not be used directly with the Arduino UNO board due to problems in level shifting between Arduino UNO and S2Go sensor port voltage values.
WARNING: Although the S2Go sensors should not be used directly with the Arduino UNO board due to problems in level shifting between Arduino UNO and S2Go sensor port voltage values.


Due to lack of connectors I plugged in directly to the Shield2GO Adaptor and it worked just fine.
Testing XMC1100 and S2Go sensors with Arduino IDE
How to setup the Arduino IDE for XMC1100 has been already described by other roadtests as from anuag_ashim and xukangmin. I followd the similar steps to do the preliminary tests with all the S2GO sensors.
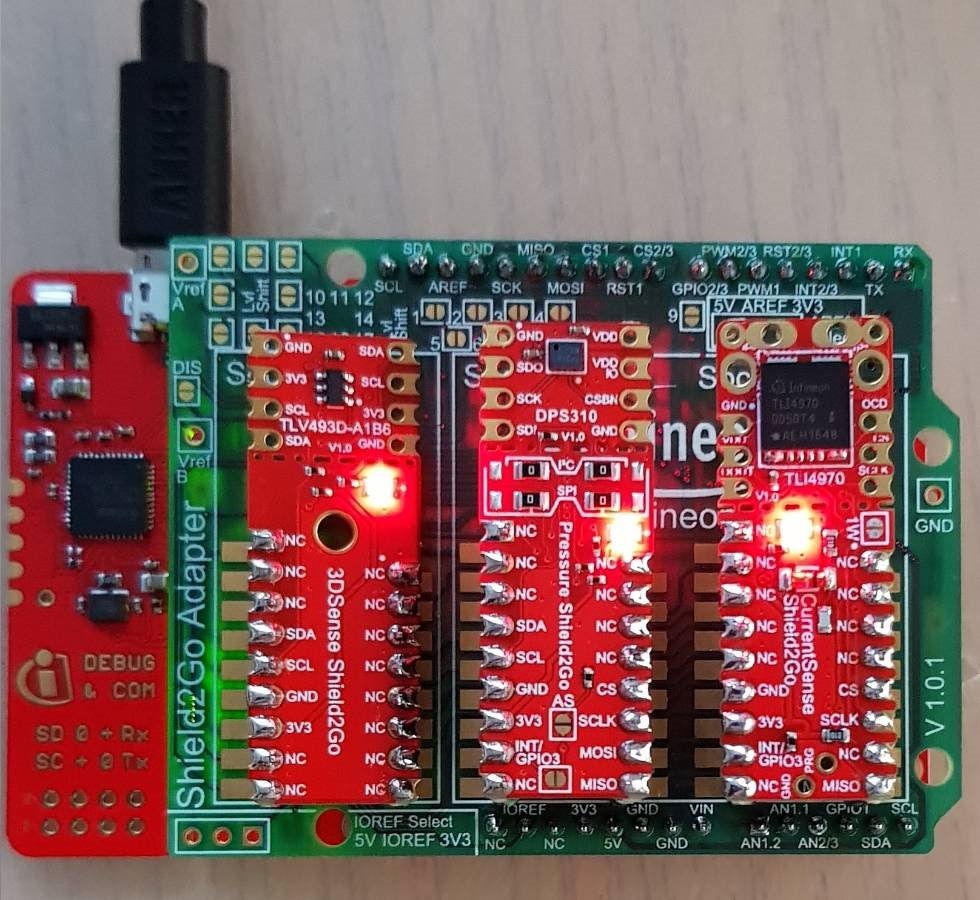
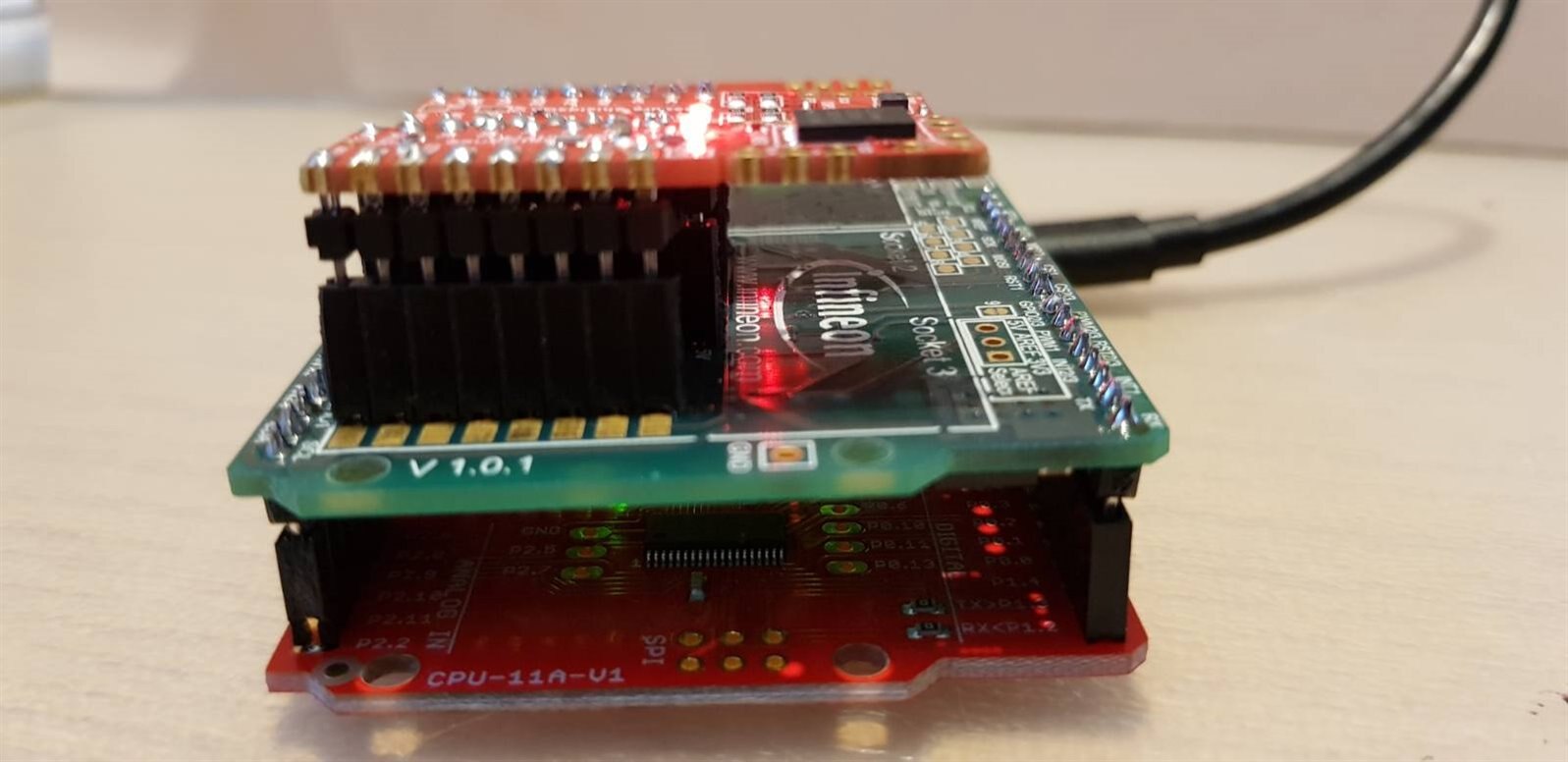
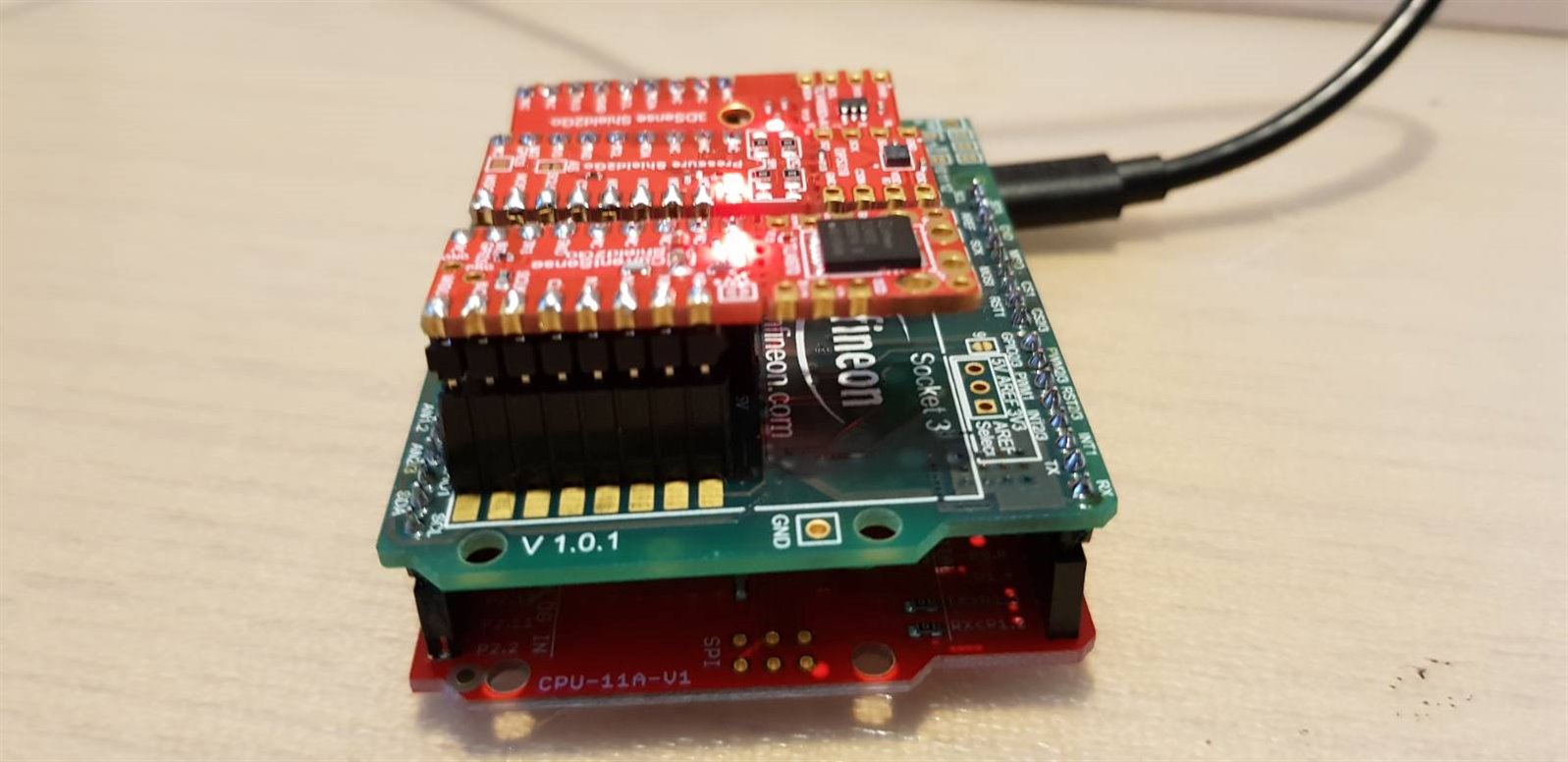
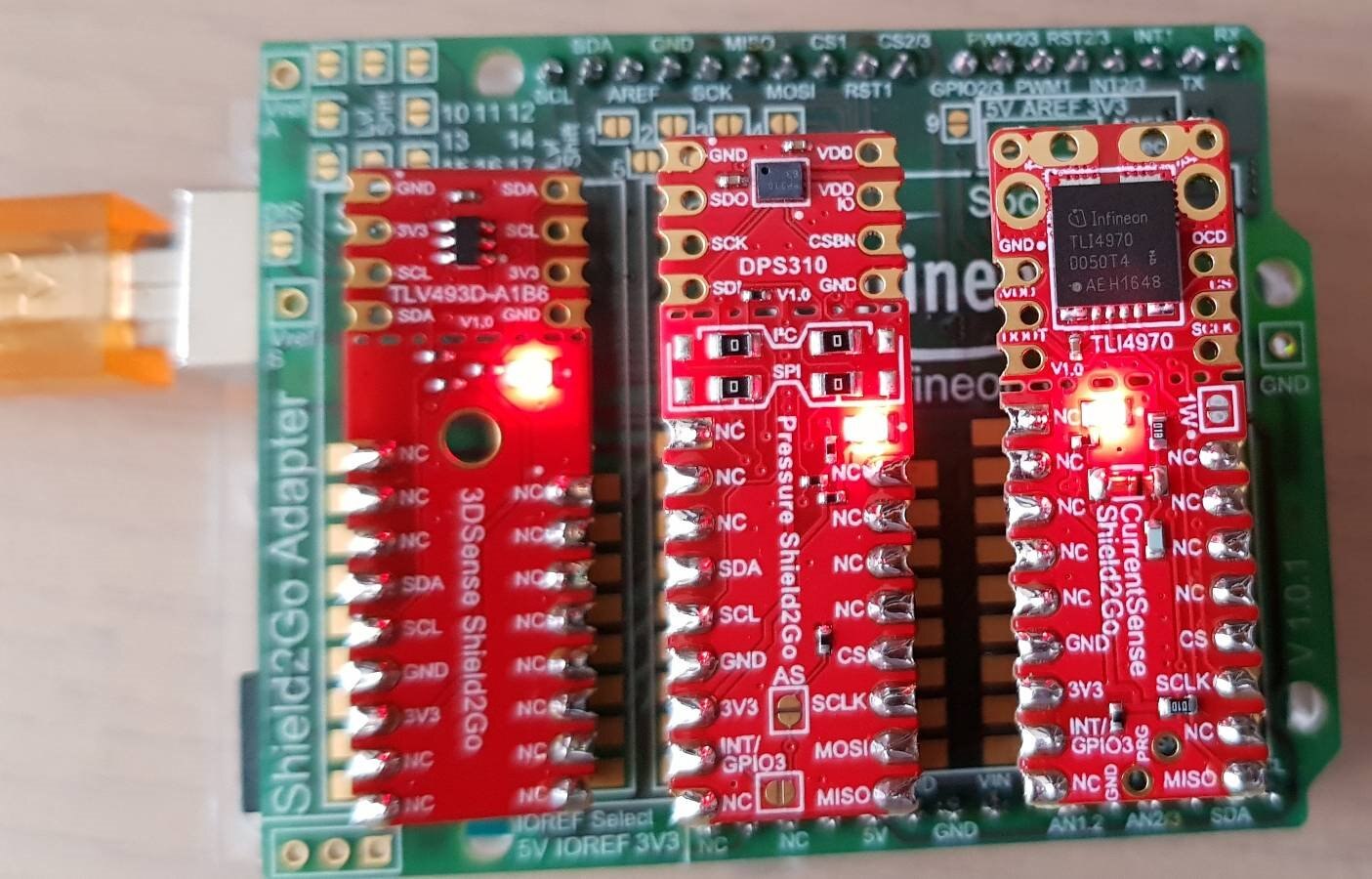
Fig: Testing all the S2GO sensors together with Arduino
Measuring all the S2GO sensors together with the XMC1100 Boot kit and the Shield2Go Adaptar Board. I combined the sensor code for all the 3 sensors in one main code and tested it with XMC1100 Bootkit
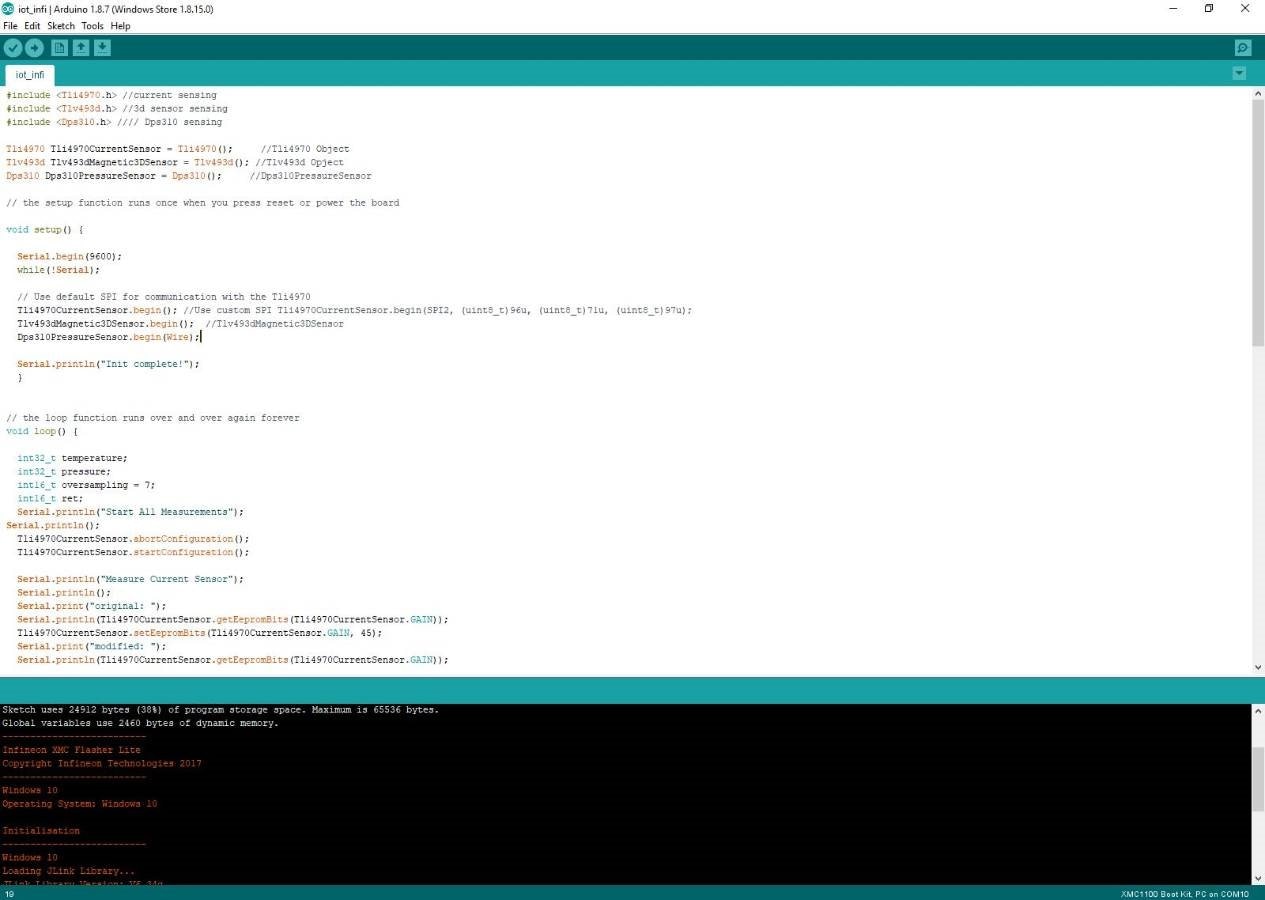
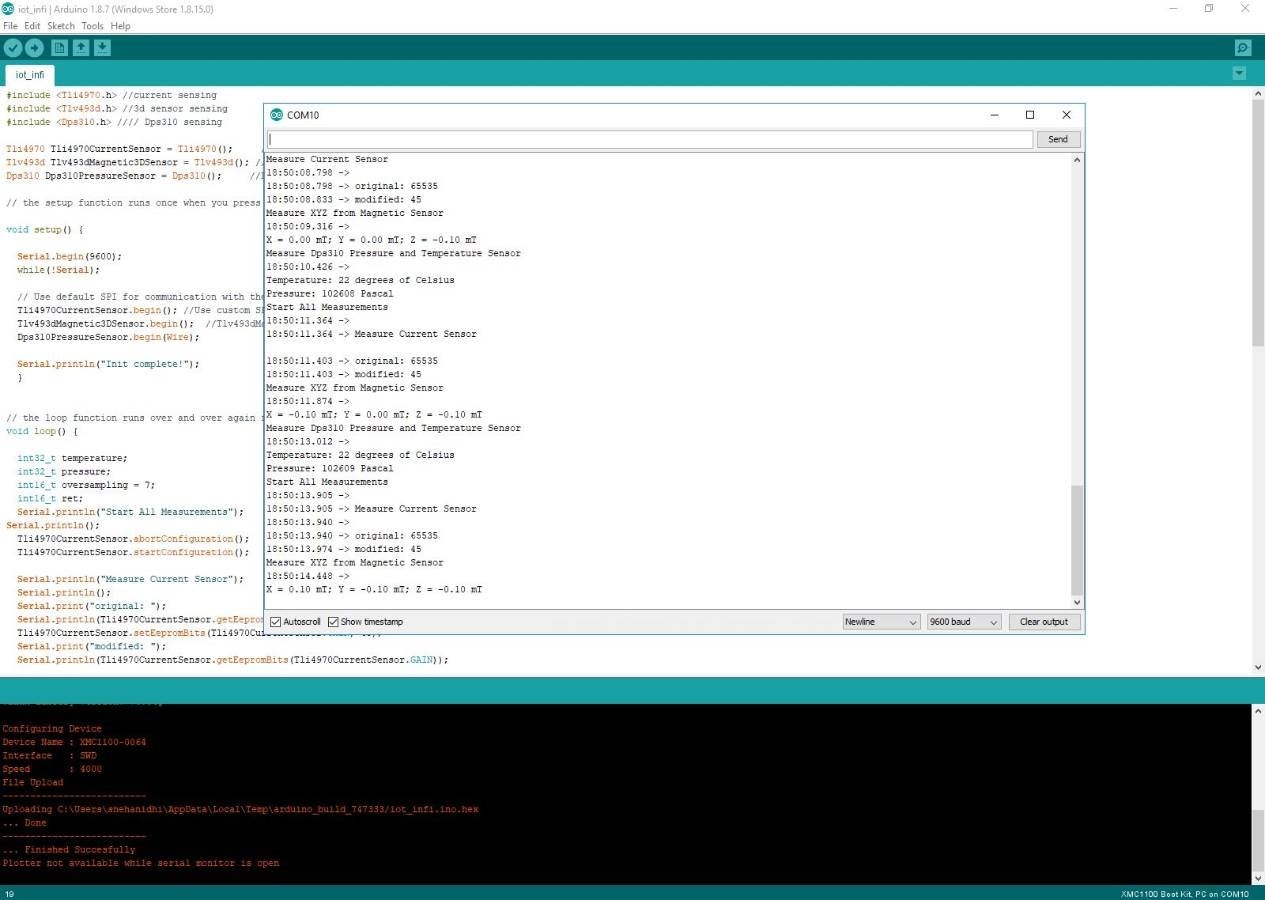
Fig: Using Arduino to measure all the S2GO sensors with the XMC1100 Bootkit
Upcoming: My next plan is to break the mini boards away and record data with XMC2GO board and Wemos mounted on the SolarBot.
