RoadTest: Mime Industries MeArm Maker
Author: luislabmo
Creation date:
Evaluation Type: Electromechanical
Did you receive all parts the manufacturer stated would be included in the package?: True
What other parts do you consider comparable to this product?:
What were the biggest problems encountered?: Could not power the MeArm from the USB at the beggining of my tests.
Detailed Review:
The MeArm Maker is a small build-it-yourself Robot Arm kit designed to facilitate young and old Markers learning/teaching about Robotics and STEM education. It comes without the controller (you should supply your own) but it is capable of working with almost any micro-controller able to drive servos like the BBC micro:bit, Arduino or the Raspberry Pi.
The MeArm Maker is a kit created by Mime Industries as an educational tool that can facilitate teaching kids and adults about robotics, electronics and programming. It contains a laser-cut Robot Arm and almost all electronics needed to have it running once assembled; It just requires a micro:bit and a way to power it -other micro controllers could be used as well-.
The Arm itself is made from laser-cut Perspex (another name for Acrylic), designed to be a low cost, open source Robot-arm with 4DoF (4 degrees of freedom) brought to life by 4 TowerPro micro-servos which in my opinion are the right choice as they incorporate metal gears and seem to be of good quality; during my tests the micro-servos didn't jitter a single time.
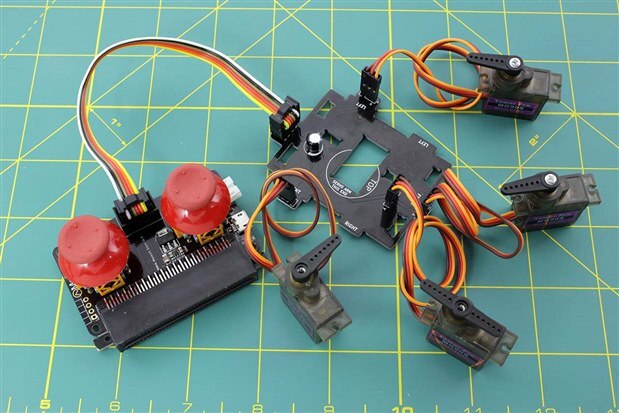
To control the MeArm, the kit containts a PCB with a connector for the micro:bit and on-board thumb-sticks. Just plug in a micro:bit, upload some code and then power the MeArm with a 2A+ 5V USB Power Supply, 6V AA battery pack or connect a 5V power supply to the power input (JST PH 3-pin connector). In my opinion is as simple as it can get to get it working!.


All the parts came in a small box with all the acrylic parts bagged together. The PCBs were loose in the box which is a detail I'd carefully consider as this may cause parts to fail or to get damaged during transportation.
| {gallery:width=960,height=768,autoplay=false} Unboxing |
|---|
Box Front: MeArm Maker box - front |
Box back: MeArm Maker box - back |
Box: MeArm Maker box |
MeArm Maker: Box contents (PCB, cables, thumb-stick grips, Hardware) |
MeArm Maker: Box contents (Micro servos, Plastic parts) |
MeArm Maker: Box contents (PCBs, Hardware, Red thumb-stick grips) |
MeArm Maker: Box contents (Micro servos + Acrylic parts) |
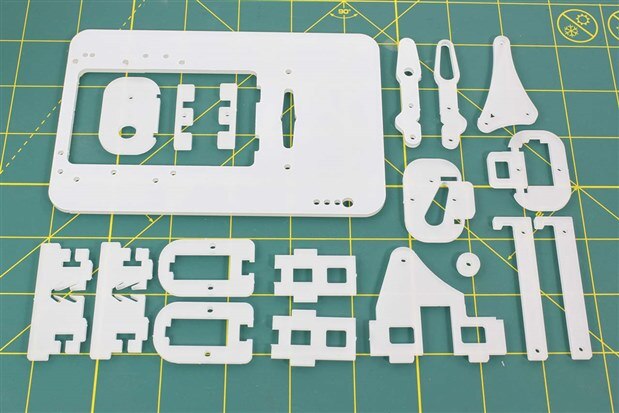
What is included in the box is listed on a high level for some parts although I was able to assemble everything without major issues, I could not verify that I got everything in the right amounts. I got the blue version of the Arm and below is what was in the box:
| {gallery:width=960,height=768,autoplay=false} MeArm Maker - What is included |
|---|
MeArm Maker: Sheets of acrylics parts - front |
MeArm Maker: Sheets of acrylic parts - back (protective film needs to be removed) |
MeArm Maker: Sheet of white parts - close up |
MeArm Maker: Blue Acrylic parts |
MeArm Maker: White Acrylic parts |
MeArm Maker: Tower Pro MG90S Metal gear Micro-servo (servo arms & screws included) |
MeArm Maker: Tower Pro MG90S Metal gear Micro-servo (servo arms & screws included) |
MeArm Maker: Hardware included |
MeArm Maker: Base board - top |
MeArm Maker: Base board - bottom |
MeArm Maker: Micro:bit board - top |
MeArm Maker: Micro:bit board - bottom |
Acrylic parts are held together by very small notches, it's very easy to take them apart!.

There is a sticker on the box that points to learn.mime.co.uk as a starting point.

After digging around, this was my approach to the documentation:
Assembling takes about an hour to do, is the first step in the process and turns out to be quite straightforward with the instructions available. There a lot of tiny parts to assemble the Arm which have been carefully designed to avoid waste of material.
Before starting any assembly, a pre-calibration step is recommended by the manufacturer to avoid issues post assembly. The calibration is very simple and just requires to upload a hex sketch to the micro:bit and then power all the servos to later on attach the servo-horns in a certain angle
| {gallery:width=960,height=768,autoplay=false} Pre Calibration |
|---|
MeArm Pre-calibration: Micro-servos horn alignment when calibrated |
MeArm Pre-calibration: servo pre-calibration instructions |
MeArm Pre-calibration: hex code for micro:bit |
Things I've noticed during the calibration:
Some of the pieces just slot together, while the arm joints are secured using the supplied screws (supplied in three different lengths) and hex key. The arm joints rely on self tapping action; the screws are not self tapping but will act like a Forming tap creating a thread by displacement of material within the hole.
When assembling, careful adjustment is needed, over tightening the screws could strip the hole, break the part or can cause the arm not to move freely. On the other hand if the screws are too loose the arm may lack precision or be floppy.
The four servos clip into strategic places with their cables routed through conveniently placed holes in the structure to connect pin-headers on the base PCB. One of the pins for each each servo connection is labelled "Y" for the Signal wire (Yellow/Orange), so you know which way round to connect the cable.
| {gallery:width=960,height=768,autoplay=false} MeArm assembly |
|---|
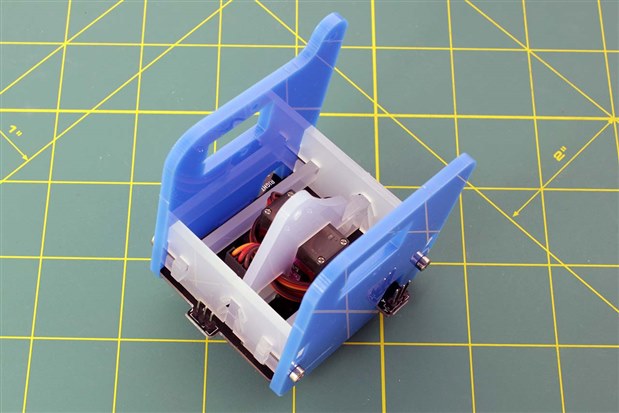
MeArm assembly: Servo base |
MeArm assembly: Servo base |
MeArm assembly: Servo base and left servo plate |
MeArm assembly: Left servo plate |
MeArm assembly: Servo base and left/right servo plates |
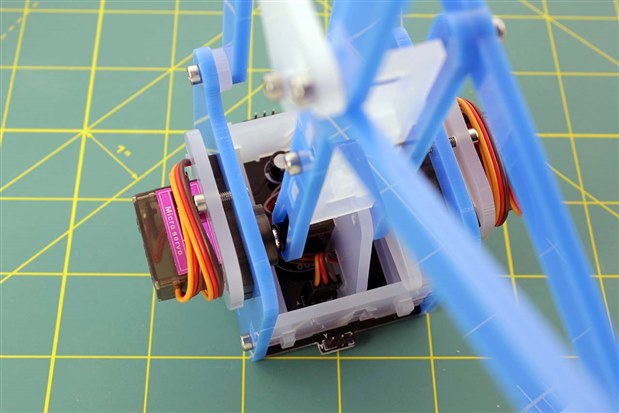
MeArm assembly: Arm |
MeArm assembly: Arm |
MeArm assembly: Arm with Left, Right and Base servo plates |
MeArm assembly: Left servo |
MeArm assembly: Left servo and arm |
MeArm assembly: Right servo |
MeArm assembly: Left, Right and Base servos |
MeArm assembly: Grip servo |
MeArm assembly: Grip servo |
MeArm assembly: Left and right grip assembly |
MeArm assembly: Grip assembly |
MeArm assembly: Arm assembled |
MeArm assembly: Arm and base assembled |
MeArm assembly: MeArm assembled and micro:bit |
MeArm assembly: MeArm assembled and micro:bit |
I would have liked longer screws available in some parts of the Arm to make the joints more durable and in order to provide them more material to grab to avoid stripping (I understand this might need a little redesign for a couple of parts). During the MeArm assembly I stripped two holes but was lucky enough to fix the issue by rotating the parts affected.
| {gallery:width=960,height=768,autoplay=false} Screws with little material to grab |
|---|
Stripped hole: I was able to turn the part upside down to work around the issue |
Some screws are not long enough: Some screws will grab little material during the assembly |
After assembling the MeArm I was left with 4 screws of different size (2 x 6mm and 2 x 10mm) to attach the micro:bit Board to the Arm's base which was not a problem but was a little odd as I would expect 4 screws of the same size (maybe 6mm). Later on found a picture of some standoff used on the MeArm Pi which leads me to conclude that maybe the hardware count included could be standard.
The pre-calibration hex code serves also to control the MeArm when used together with a micro:bit. The MeArm is relatively easy to operate with the included thumb-stick joysticks. Certain movements won't flow smoothly -with a little bit of harshness-; this won't impact operating the MeArm normally. Tried changing the adjustment of the screws but ended up with the same result.
In my opinion the way is programmed makes hard to control the MeArm, it requires fine precision when using the Thumb-sticks leaving no margin for error and also the movement speed is constant. I think the hex code could be improved adding a small dead zone around the center of the thumb-sticks to avoid unwanted movements and also by changing the speed of the movements according to the thumb-stick angle/input would be nicer.

I did some power consumption measurements with my E36313A power supply connected directly to the battery input, detecting current spikes close to the 2A mark which I'd say is very close to the limit of what a normal USB power supply may deliver + the voltage drops caused by the USB cable itself.
| {gallery:width=960,height=768} MeArm Power Consumption |
|---|
Graph: MeArm power consumption |
E36313A setup: MeArm power consumption setup |
E36313A log: MeArm power consumption data logger |
During my tests I've found few issues, most of them just observations that won't affect the use of the MeArm but could affect negatively the product on the user experience front.
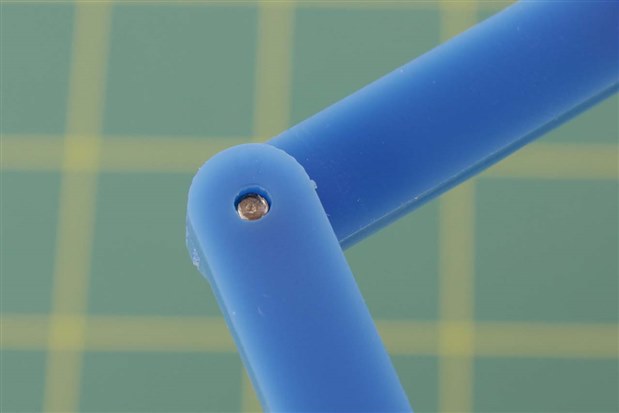
When I started with my tests, I tried to power the MeArm with a USB power supply (the Raspberry Pi Universal Power SupplyRaspberry Pi Universal Power Supply to be precise), it was behaving erratically/unreliable and this is where I lost a lot of time trying to find the culprit of the issue, these are the two causes I considered:
The MeArm's connector may be out of spec or faulty

Raspberry Pi USB adapter gold plated contacts may be out of spec (higher distance to the surface they make contact with). Below picture can tell a little bit about it (white Raspberry Pi micro USB connector pictured on the left)

I tested the MeArm with other USB cables / power adapters and worked well. Could not conclude that the Raspberry Pi's official power supply may faulty (it has worked flawlessly with every piece of electronics I have tried it on), but also couldn't conclude that the MeArm's micro USB connector is faulty or out of specs.
When powering the MeArm with USB, there's going to be a voltage drop present every time a servo motor stalls or when working on many movements at the same time. I've found that if voltage drops to around ~4.3V the MeArm will behave erratically sometimes will lock in place without responding to any input. This could be worked around just by disconnecting and connecting the power again.
Given my tests, I'd say that the safest way to power the MeArm is using the JST PH connector. Also I think the micro:bit code may be improved a little to add angle-limits to every servo. I noticed some servos motion is just stopped by the MeArm structure stalling the motor in the process and causing voltage drops carrying with the problem this gets.
The pre-calibration step is not failproof and the MeArm may require some fine tuning after assembly -unfortunately.

Unfortunately, I've found few quality issues that are hard to miss and few other minor issues, but in my personal opinion, I consider that all of these need attention to provide a higher customer satisfaction and to improve the user experience..
| {gallery:width=960,height=768,autoplay=false} Some manufacturing issues found |
|---|
Bent pin: Bent pin on Left servo pin header |
Soldering problems: Pointed at few soldering problems, mostly too much or too little solder |
Misaligned PCB components: This is a minor issue but this affects tolerances e.g. when planning to build a DIY enclosure |
Dirty PCB: MeArm micro:bit pcb |
Cosmetic issues: Few scratches, pictured the most noticeable one |
As a device to help teach programming and robotics the MeArm Maker is an excellent kit as it can can be programmed, assembled and incorporated into your own projects with your own ideas. Despite a few troubles, I've found the MeArm Maker a joy to build and use once I got the hang of it and I was able to circumvent the issue found.
Thank you for reading this review and a big thanks to Element14 for picking me for this Road Test.
Stay tuned for more content related to the MeArm Maker to be added here.....


















































Top Comments
Hello Donald,
I did not have the voltage drop problems using the power supply (there is a graph in my review of that particular test), I think the safest bet is to power the MeArm with JST PH or soldering…
Great review! I love all the detailed pictures. I was able to compare it with my older model MeArm and confirm that they have improved the design in many places. It looks like it still is finicky and doesn…
Very comprehensive roadtest.
Did you only have the voltage drop problems when powering from the USB? If it was OK when powering from the bench supply, it may indicate that the USB supply /cabling was too…