RoadTest: Mime Industries MeArm Maker
Author: thamizharasan
Creation date:
Evaluation Type: Electromechanical
Did you receive all parts the manufacturer stated would be included in the package?: True
What other parts do you consider comparable to this product?:
What were the biggest problems encountered?: 1. The plastic parts having screw holes become loose when tried to reassemble for 2nd time. Recommend to use Nuts & Bolts to maintain tightness. 2. There is a bug in the design, the micro:bit slides-in to the slot in the joystick on either direction. So, ensure to keep the buttons side of the micro:bit facing top as same as joystick switches, to turn-on (due to polarity issue). 3. The Joystick with micro:bit controller, needs some boot (for height) to fix to the me-arm base plastic.
Detailed Review:
Unboxing the MeArm Maker
There were two boxes shipped.
The Micro:bit controller came on a separate box & the MeArm Mechanical parts came on a separate box.

The micro:bit box included the micro:bit controller, set of AA batteries, battery holder, USB cable & mini manuals.

The MeArm box included the Plastic base & arms, 4x Motors with connector wires, Motor Driver base board, Joystick, Screws, 6-pin Ribbon Cable.

Before assembling the whole kit, I fixed the 4x Servo Motors with single headed & double headed studs (as shown below), which is called as Calibration.
Ensure its done first, else you end up re-assembling at a later stage wasting time & efforts.
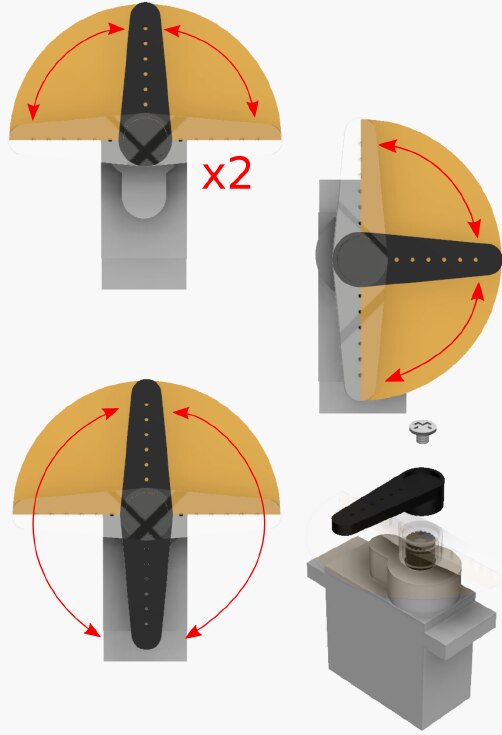
Fix the 1x Double headed stud fixed Servo Motor in the center of the Servo Motor driver base board. This rotates the whole base of the Arm on either direction.

Now assemble the Arm parts & tighten with the screws provided.

Then, fix 2x Single headed Servo Motors on the Left side & Right Side marked positions in the Motor Driver base board.
Tip: Ensure you connect the 4 pin Servo Motor wires to the Motor Driver base board aligning with 'Y' mark for yellow wire.
This step is important, to make the Servo Motor function in expected direction.

Then, fix the last Servo Motor on the head portion of the Arm & connect the connector to the Motor Driver base board.
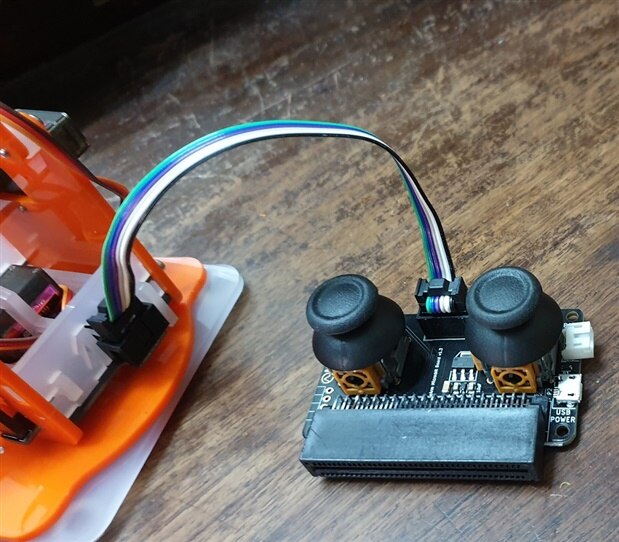
Now, connect the Joystick to the Motor Driver base board with the 6pin ribbon cable provided with the kit.

Now, keep the MeArm kit aside.
Connect the micro:bit controller to a laptop/desktop using the USB cable provided with the kit.

Once this device is detected by the Laptop/Desktop's Operating System, check if you are able to see micro:bit device under My Computer.
Now, download the MeArm micro:bit program code from http://downloads.mearm.com/MeArm/MeArm-microbit.hex
(this is a hex file)
Once downloaded, right-click this hex program file & click 'send to - micro:bit'
The Amber light in the micro:bit controller will blink while copying the hex program file.
This is only a copy operation & this hex program file would not be visible on the micro:bit device after copy.
Then disconnect the micro:bit from the Laptop / Desktop & Insert it into the slot provided in the Joystick.

The micro:bit switches help you on selecting the Servo Motor of the MeArm, either to move the MeArm Base, MeArm Stem or MeArm Head.
The Joystick will actually allow you to navigate the direction.
Finally, the action...
That's it !
Hope you like my review.
Happy Prototyping MeArm with micro:bit controller.
Reference Links:
To assemble the mechanical MeArm parts http://learn.mearm.com/assets/mearm.pdf
To download the micro:bit hex program code for MeArm http://downloads.mearm.com/MeArm/MeArm-microbit.hex



Top Comments
I like reviews with plenty of photos as it helps me understand what the product is and what it is capable of. Your review achieves that, so thank you. If you also added a video of MeArm in action and supplied…
Good explanation of assembly. I have made many similar robot arms based on the MeArm but this one looks as if the assembly process has been streamlined, plus some parts redesigned to make them better and…
Hi Dubbie,
Thanks for your comments.
Obviously, we cannot expect it to lift things due to made of plastic pieces with tiny self-thread screws.
As you can make out, it doesn't have wheels, so it cannot move…