RoadTest: All-in-one Robotics Board + micro:bit
Author: bmarq
Creation date:
Evaluation Type: Development Boards & Tools
Did you receive all parts the manufacturer stated would be included in the package?: True
What other parts do you consider comparable to this product?:
What were the biggest problems encountered?:
Detailed Review:
I will focus my review in terms of hardware since, in my opinion there is a plethora of STEM applications we might think of, and, for sure, this board may accomplish them all.
Using this board with other BBC micro:bit boards it makes it very ease to use.
This package has arrived as expected. A first look gave me the insight of the board's characteristics as kitronik specified:

The board can support a total load of 10A, which is sufficient to supply al the ports to control DC motors/Stepper motors and servos (4 motors and 8 servos).
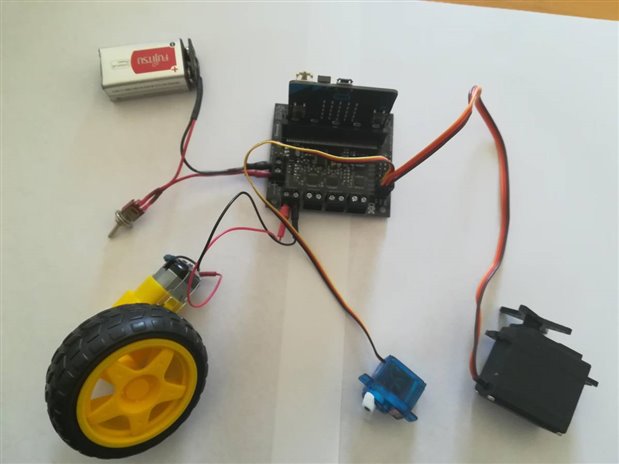
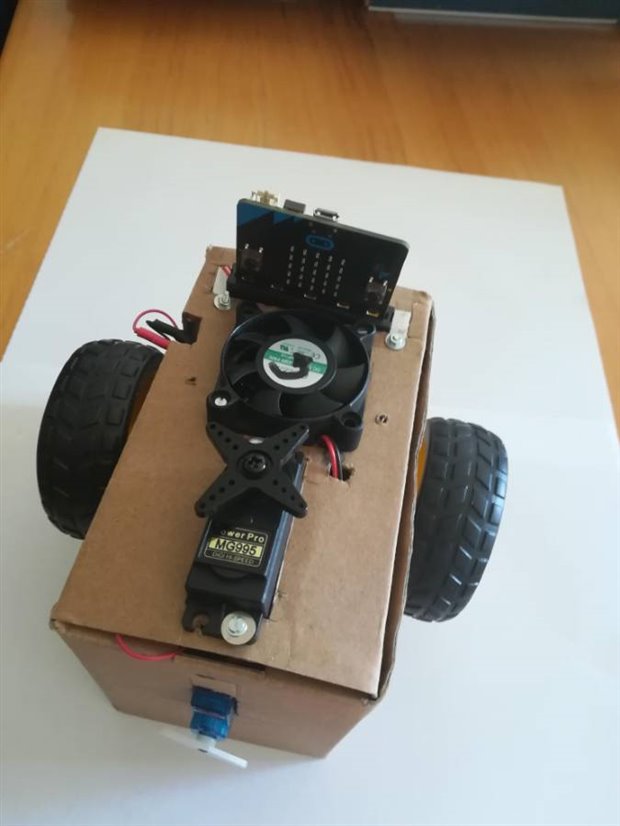
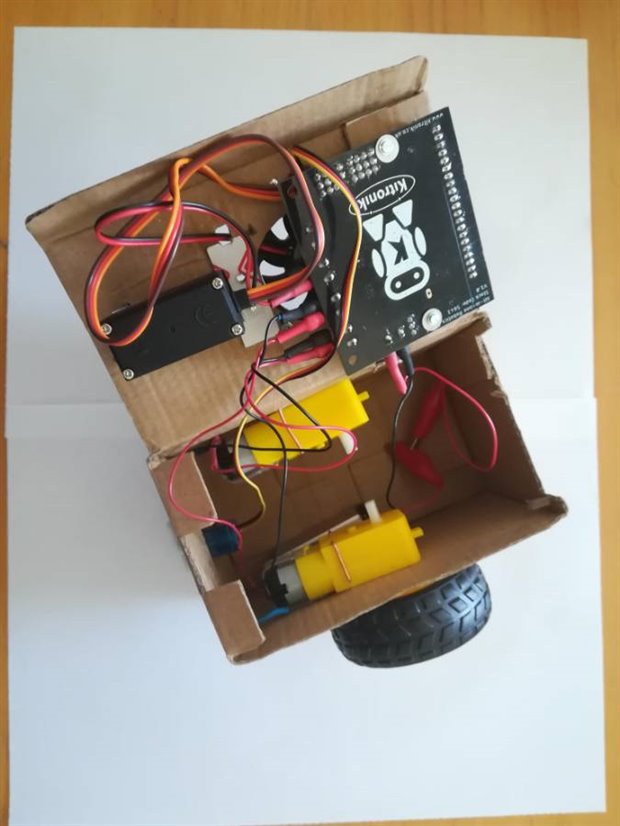
To perform my review I made a small testbed as shown in the following figures, using 2x RC Car like DC motors, 1x 380º servo, 1x 180º servo, and a DC fan.
I measured the total current draw of the board using different motors (see figure below).

From my measurements I concluded that this is sufficient to drive all the motors that the board supports.
I think the board meets all the requirements for which it was designed. However, I think improvements could be made to the board.
In my opinion, we could reduce the possible number of servos (instead of 8 to 4) and introduce the possibility of using some sensors, such as two ultrasonic distance sensors and a line follower.
I noticed that when all motors and servos were running, the ics power driver warmed up a bit and the introduction of heat sinks would only improve the performance of the card.
Finally, the possibility of using the I2C protocol allows the board to be expanded to use more I2C micros-systems. However, the address plate could be simpler if micro-switches were used, as shown in the following figure.

In software terms, the card can be easily programmed using Microsoft's MakeCode.
However, the board should be accompanied by more detailed information regarding its use and programming. In my opinion, the available examples are too generic.
As a final words, I am very pleased with this board and I think that, with the small changes I suggest, it could become a reference board in using BBC micro: bit in STEM teaching.




