RoadTest: Infineon Gate Driver with Truly Differential Input
Author: Gough Lui
Creation date:
Evaluation Type: Semiconductors
Did you receive all parts the manufacturer stated would be included in the package?: True
What other parts do you consider comparable to this product?: The product is unique, other MOSFET drivers on the market today are not truly differential.
What were the biggest problems encountered?: Documentation has some poor expression, requirement for a lot of different types of probes to fully appreciate the board's offerings, design does not allow for easy measurement of driver output signals, only half-bridge output signals.
Detailed Review:
Infineon MOSFET Gate Driver IC Evaluation Board RoadTest
By Gough Lui – June 2019

Taking a break from the regular type of RoadTests that I normally choose to participate in, I decided I would give the Infineon MOSFET Gate Driver IC Evaluation Board a try as it seemed to be something a bit niche. This board (EVAL_HB_BC_1EDN8550B) demonstrates the Infineon EiceDRIVER™ 1EDN8550B which features truly-differential-inputs which is a rather nifty feature to have, while also blurring the lines between a low-side driver and a high-side driver enabling some new possibilities.
Before I begin my RoadTest, I’d like to make it clear that I’m no MOSFET or power conversion expert. Instead, I’ll be approaching this RoadTest in a fashion that is more exploratory – I’m hoping the board and its documentation will teach me (and you) something while trying not to make a complete hash of it along the way. I’ll also be using whatever instrumentation I have to hand – which is unfortunately, not always exactly what is optimal. Regardless, I do take the board through a variety of tests based on suggestions in the datasheet, make critiques on the design of the board and attempt to test the driver portion of the circuit on its own requiring some rather destructive modification of the board.
As usual, thanks to Infineon and element14 for selecting me for this RoadTest, which was one of three concurrent RoadTests I have been working on over the past two months. As this board seemed to be more straightforward than the others, I have left it to last (sorry Infineon) – accordingly, this review will be more monolithic in nature rather than being split into many parts like some of the larger reviews. If you found this review informative, interesting or entertaining, I’d appreciate if you would leave a rating, like or bookmark the document, or comment with your questions which I will endeavour to answer.
It seems that in many cases, MOSFET driving is something that oversimplified. In many applications, it’s about turning the MOSFET “hard-on” or “hard-off”, which means driving the gate relative to the source voltage to a value higher than Vgs(th) and below the maximum Vgs, or to zero or even slightly negative. However, this explanation omits many key subtleties – one of which is the gate capacitance. Due to the structure of the MOSFET, the gate area and oxide form a capacitor with the channel which can be in the several hundred pF to several nF region. Coupled with this is the behaviour of the MOSFET which has a “linear” region where the MOSFET could dissipate power in the transition between fully on and off and the need to push Vgs high enough to reduce dissipation to the absolute minimum. As a result, for efficiency reasons and to prevent damage to MOSFETs where higher current flows are involved, the switching of the MOSFET should be done as quickly as possible without violating dv/dt limitations and to as high a Vgs as possible. This is why even logic-level MOSFETs which could be driven from a microcontroller could benefit from a dedicated MOSFET driver. Of course, there are many other subtleties, but I will not go into them here.
The role of a MOSFET driver is simply to be a “small” chip that takes a signal from your microcontroller and accordingly sources or sinks current into the gate of a MOSFET (or bank of MOSFETs). By being purpose-built for the task, such drivers can deliver the high peak currents and higher gate voltages necessary to quickly, efficiently and safely switch MOSFETs. They can also provide for enable-signal control and undervoltage lockout (UVLO) protection to avoid running MOSFETs when they cannot be turned “hard-on”. In many of today’s surface-mounted designs, MOSFET drivers in the SOT-23 package with five or six pins are quite common and often interchangeable. Such drivers are often specified by their peak sink/source currents and UVLO thresholds and are optimised for the task, often featuring separate pins for source and sink to optimise their performance.
A brief look at the existing SOT-23 low-side MOSFET driver market reveals a number of vendors and families of popular products including (with the lower of source/sink currents in brackets):
With many options available, where does the 1EDN8550B fit in? Well, actually, it doesn’t.
Existing low-side drivers such as the ones above generally feature logic-level inputs to control the MOSFET driver. In some of these datasheets, these are marked similarly to the inverting and non-inverting inputs into an op-amp. However, in reality, for the units with two inputs, they instead either form the non-inverted input and inverted input, or an input and enable signal. These signals are referenced to ground, which is a key problem.
In the case of MOSFET drivers, switching causes large swings in current sourcing or sinking that can cause local distortion of the ground level due to the resistive, inductive and capacitive properties of the traces connecting it to the power supply. As a result, the ground level at the driver can be different to that of the source. Worse still, as these effects are dynamic, this can also result in unwanted oscillations, which both can combine to result in false triggering which could result in a loss of efficiency, a source of further noise, or damage devices completely.
Infineon Technologies new 1EDN7550/8550 series EiceDRIVER™ drivers are in a category of their own for this reason. They feature truly differential input where both the inverting and non-inverting signals are referenced to each other, rather than to the ground. This can avoid the ground bounce issues noted before and avoid false triggering.
However, as the driver’s tolerance to ground shift is rated at ±70V static and ±150V dynamic, this opens up a new possibility of using the same component as a high-side driver. In ordinary designs, high-side driving can be rather inconvenient to implement, requiring a dedicated half-bridge driver and level shifter or isolated drivers through isolating transformers. In this case, since the 1EDN7550/8550 doesn’t mind the input signals being shifted by quite a large range, it is possible to connect the driver with its ground and Vcc “floating above” the system ground and MOSFET Vcc, but still have the logic inputs referenced to system ground. This leads to the potential for savings in simplifying BoM as well.
Add to this, the 1EDN7550/8550 doesn’t sacrifice anything in performance either, with a rated peak 8A sink and 4A source, operating voltage up to 20V and 4V/8V UVLO versions. Needless to say, this makes the Infineon 1EDN7550/8550 rather attractive. The price for the driver is currently AU$1.93 from element14 AU, which is not a premium compared to (say) a competing Texas Instruments UCC27511 currently AU$2.12. That’s a nice surprise to see.
The EVAL_HB_BC_1EDN8550B board demonstrates the Infineon EiceDRIVER™ 1EDN8550B, but also gives an opportunity to showcase Infineon’s Optimos BSC026N08NS5 and XMC2GO products. It comes packed in a thin-colour-cardboard box with appropriate anti-static bag protection, complete with even a knob for the potentiometer and nylon stand-offs for the main PCB. The board is double-sided, blue in colour and comes populated with quality components. Documentation is online, with only a disclaimer shipping with the unit. Evaluation requires some assembly, including soldering header-pins, jumper wires and fitment of hardware. It also requires users supply their own microUSB cable and appropriate probes to match the sockets on the board which appear to be designed for Teledyne LeCroy probes. Use of a current clamp probe and differential probes are also recommended due to the various ground levels on the board.


In the case of this RoadTest, element14 have generously supplied a Meanwell 48V/1.25A 60W power supply. Those ordering the board on its own would need to supply their own 48V power supply through a 2.1mm centre pin barrel jack.


The board itself can be purchased for AU$181.28 from element14 AU which appears to be a bit on the expensive side, especially as it is mainly used to illustrate concepts which are illustrated in the freely downloadable documentation. It is, perhaps, most useful for those who might want to better familiarise themselves with the driver and its abilities based on this example design (especially if you don’t believe Infineon), but as the driver itself can be had for around 1% of the price, perhaps others may be better served by purchasing the driver and integrating it into their own test set-up or designs instead.
For more information, see Infineon 1EDN8550B RoadTest-in-Depth: Ch2 – Unboxing.
In order to get up and running with the board, the XMC2GO must be programmed and in order to achieve that, the Infineon DAVE Eclipse-based IDE is required. The setup is relatively easy, although at times can be a little less than intuitive, but for those who really just want to get moving with the evaluation board, they really only need it to program the board with the PWM program once and the board will retain it through power cycles. The program is quite basic, but enough to get up and running.

The datasheets for the driver and the MOSFET are well written, detailed and useful. The guide for the evaluation board, however, could do with some improvements with a number of broken cross-references, spelling and grammatical errors. Despite this, there is enough information for interested parties to design with and demonstrate the board’s results without even having the board in their hands.
For more information, see Infineon 1EDN8550B RoadTest-in-Depth: Ch3 – Set-Up & Documentation.
This is where we get to the interesting part – testing the driver itself. In order to run the tests, I decided to forego the included Meanwell power supply and instead use my Rohde & Schwarz HMP4040.04 power supply that has all floating rails. Two rails were put in series and set to 24V each to achieve 48V output to power the board. The third rail was used to generate 5V to run the XMC2GO, with all necessary wires home-built. For the load, I used the B&K Precision Model 8600 DC Electronic Load and oscilloscope duties were performed with the Rohde & Schwarz RTM3004.
As the probe points on the board were designed for use with the Teledyne LeCroy probes, I found that the included Rohde & Schwarz probes to be much too thin. Searching through my probe collection, I found that many “generic” 60MHz probes such as those included with my Picoscope 2205A, Velleman PCSU10 and obtained from a local electronics retailer many years back fit just perfectly. As a result, I used the Picoscope probes with my RTM3004 after first ensuring the probe compensation was appropriately adjusted, although because of this configuration, the measurement system bandwidth is now limited by the probe.

It seems that some of the probe connectors were a bit too close together, causing the probe bodies to interfere with each other. There were also some places where I would like to have monitored (e.g. MOSFET driver output), but no probe connections were available. The output for the load being 4mm banana sockets is nice, although as they didn’t accept shrouded banana plugs, I had to modify my plugs to fit.

Depending on the signals you wish to measure, you may need to use differential probes and a magnetic clamp current probe as well. In my case, I used my EEVBlog HVP70 high-voltage differential probe in 1/10th scaling (not ideal) to perform differential measurements, but was unable to get sensible current measurements.

Testing has been broken into subsections – “Half-Bridge Demo” is based upon the board as designed and intended, with “Driver Performance” tests made by modifying the board somewhat extensively to inject signals and our choice of Vcc into the driver and measure the driver output, using the RTM3004’s inbuilt function generator. Unfortunately, the board as presently designed does not make measurement of the driver output signals and alternate powering of the drivers easy and perhaps this could be better done with just the bare driver chip.




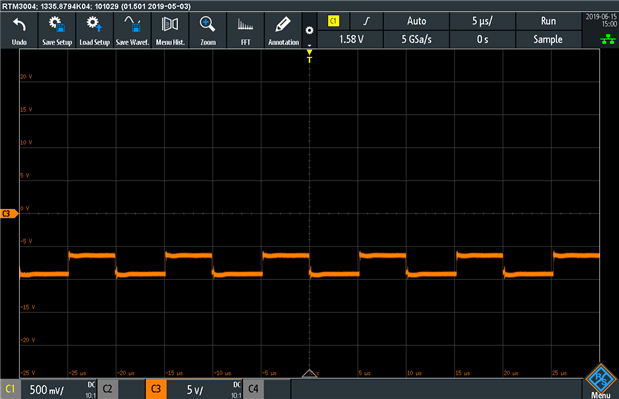
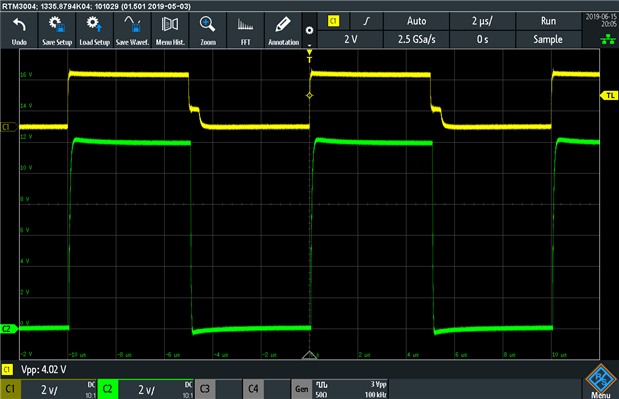
The high-side and low-side signals are generated from the one XMC2GO microcontroller board. The frequency of oscillation is about 100kHz with around 5µS for the high side and 4.8µs measured on the low-side, with about 100ns of dead time in-between each transition.

As I’ve never probed such a converter or even microcontroller-outputs so closely before, I was surprised to find that there were some observed signal oscillations during the shift in signal level. The direct measurement of dead-time seems to show something closer to 95ns, but this is partly because the fall time of the off-signal from the microcontroller appears to be a little sluggish.


Even just looking at the difference between XMC_GND and the power supply GND, there is a noticeable deviation of around 1Vp-p, especially around switching periods.

This does depend slightly on where you measure it and how it is probed. In this case, a differential probe is used on J1 which shows a higher amplitude but slightly different frequency. I suspect the loading of different wires and probes might affect the dynamic ground shift.
The XMC generates signals which are approximately 3V relative to XMC_GND. However, the board is designed such that XMC_GND can be shifted away from GND to simulate a DC ground shift situation. To confirm this is happening, I put a differential probe across J1 to examine the two grounds.


As the three screen-shots above show, the DC ground shift can be adjusted by close to 10V either side. In this case, the converter continued to operate with absolutely no hiccups – as it is truly differential, this ground shift did not affect it entirely, whereas with standard drivers, it could cause it clamp off or on or be permanently damaged as its voltage tolerance is exceeded.
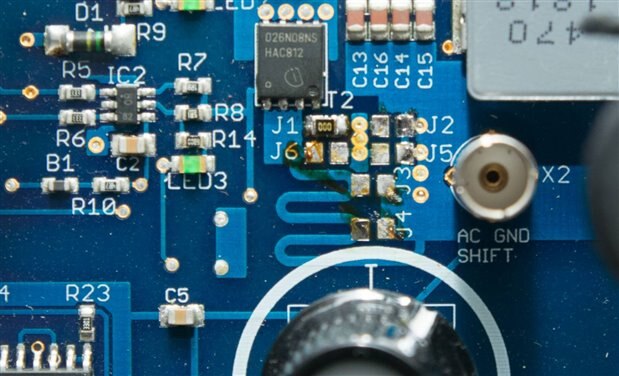
I took the opportunity to examine the MOSFET driver outputs by probing at the pair of resistors R1/R2, R7/R8 which are the resistors that connect to the MOSFET gate.


For the low-side part of the bridge, we can see the MOSFET is driven with 0V/12V relative to the power GND, which appears to have some ringing due to ground bounce.


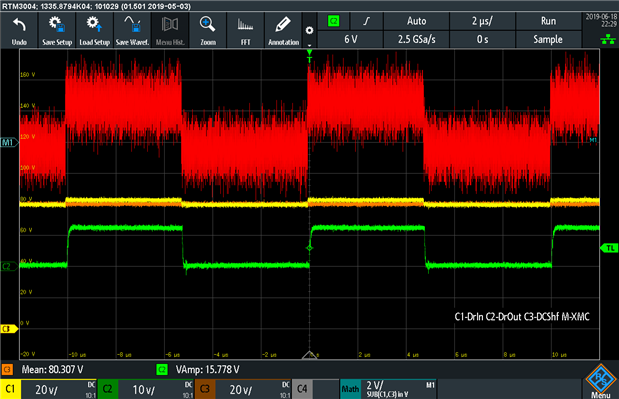
Looking at the high-side part of the bridge, the usefulness of the truly differential concept becomes apparent. The high-side driver is pushing 60V relative to the power ground and it’s clear to see. This works because the ground for the driver is the +48V line and it drives using an isolated +12V supply, thus pushing the gate of the upper MOSFET to 48+12 = 60V. But because the input signals from the XMC2GO are referenced differentially, even though it swings from 0-3V (which is -48 to -45V relative to the high-side driver’s ground), it functions correctly. That’s impressive.

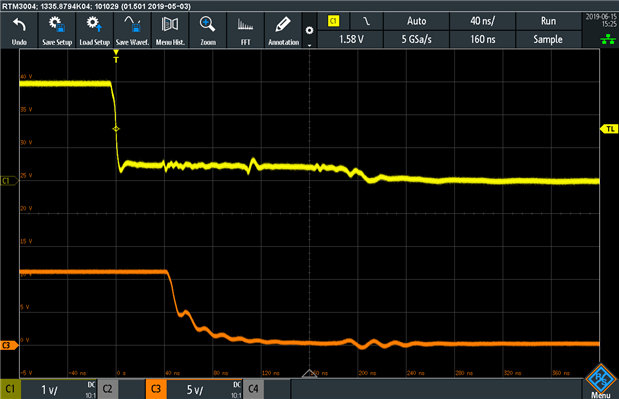


Attempting to get a feel for the propagation time through the MOSFET, I looked at the XMC2GO’s signal versus the MOSFET driver output. The low-side and high-side had similar results, which was in the ballpark of 60ns switch-on and 45-50ns switch-off. This is not quite the 45ns typical of the datasheet, but this is expected as the capacitive loading of the MOSFET and drive resistor selection will probably have an impact on the result.
While the unit claims to have been tested to 60W on the product page, I didn’t see any mention of this in the documentation for the board itself, so I thought it might be nice to push it and see what happens.

The board survived running at 131.43W output (uncompensated for voltage drop on the test leads) with a corresponding 147.32W input for at least a minute (which was as long as I dared to run it). After the test, no damage was incurred but the inductor was quite warm. This was to be expected as the test was at 6A current with an inductor that was rated for 6.5A peak. Considering the amount of power flow, the MOSFET drivers remained impressively cool.
As I had no magnetic clamp probe (merely a meter that wouldn’t illustrate waveforms), I thought I’d bridge the X5 connections with a 10cm length of 0.5mm2 cable that would produce some voltage drop. While I understand this would have a potentially negative impact on the converters’ performance, I was not really assessing the output quality, thus I thought this would be acceptable.

Unfortunately, due to the amount of noise and low signal amplitude, it was not possible to measure inductor current with any level of accuracy, so I decided to forego inductor current measurements.
This part of the examination is, unfortunately, rather inconvenient to perform. The AC ground shift is mostly induced by varying a small inductance by removing jumpers that short over trace sections. Unfortunately, instead of jumpers or DIP switches, this is done through an array of 0-ohm SMD resistors, necessitating reaching for a hot air gun or soldering iron (preferably tweezer type) to remove the resistors. Not being an SMD virtuoso, I found this a little frustrating to do, resulting in some melting of the DC ground shift potentiometer knob due to excess hot air. It was also a little too close to the potentiometer to comfortably get tweezers in there.

Instead of testing all the possible combinations, I decided to choose two combinations of AC ground shift – intermediate corresponding to R1+R3 and severe corresponding to R1-only.


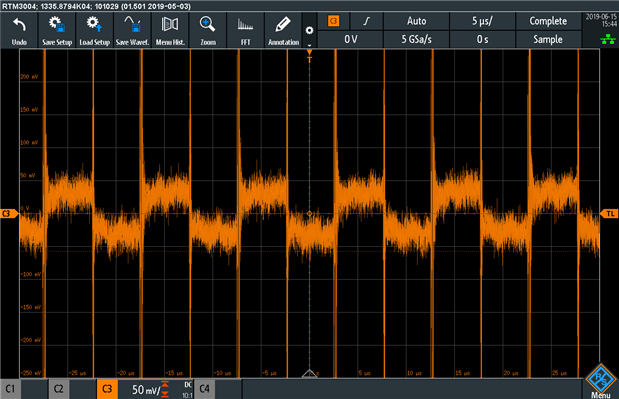
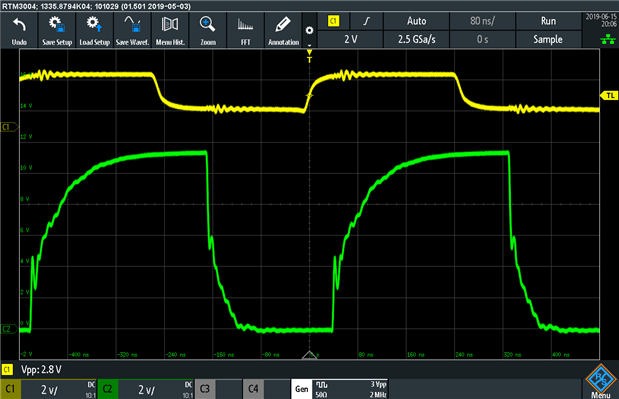
With the intermediate ground shift, the peak-to-peak ground shift amplitude is 5.4V as measured but the converter performs as normal regardless of where the DC ground shift is selected. In the second close-up trace, we can see the local ground shift at the MOSFET end has a power-off spike, which isn’t seen by the differential probe sitting on the other side of the board at J1.


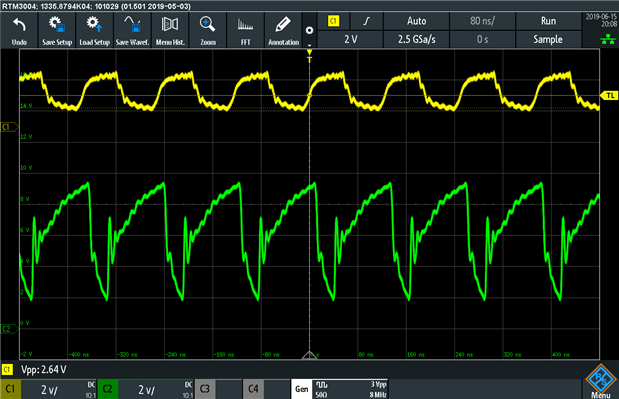
In the most severe case, the AC ground shift amplitude reached 13.64V (which is less than claimed in the manual, but still pretty severe). Again, no change in operation was observed. I was somewhat expecting that I might damage the board in the process of evaluation based on the documentation and disclaimers, but it seems that with the truly-differential drivers, all of the achievable operating conditions are “safe” for the MOSFETs. My use of the HMP4040 to ensure adequate current limiting to prevent catastrophes are not particularly warranted – perhaps this would be useful when confirming this by using a regular driver, but as I had none to hand (and I excluded this from my application), it looks like there will be no smoke today.
I was interested in understanding the driver’s performance in more detail, but the evaluation board does not provide an easy way for this to happen without some modification. With the modifications made, I can feed a signal from the signal generator into the inputs of the driver and observe its output to the MOSFET gate. This relies on the unpowered MOSFET on the evaluation board as a “load” on the driver (as I don’t have any small capacitors on hand to simulate this) and the included gate source/sinking resistors, which is almost certainly not going to identically match the datasheet test conditions. It will however, give us an idea of its abilities. Also note, the flying wires in the modification are likely to introduce some measurement errors as well.

At 100Hz and 100kHz, things look all fine and dandy. There is some noticeable slope to the power-on and during the power-off, it seems the driver does do something strange to the signal generator (trying to sink current into it?) which causes a hump to appear.



At 1MHz, the slope is now starting to become even more pronounced, and the signal generator voltage even goes negative. This gets worse by 2MHz, with the propagation delay becoming more visible and the duty cycle seems to be somewhat corrupted. At 3MHz, this becomes even more true, and by 5MHz it’s as if the chip is almost always in a case of sinking or sourcing current. The current consumption of the chip rises to 220mA or thereabouts, which represents significant dissipation. The chip appears to cut out after a few minutes as it appears to protect itself thermally.
Pushing to 8MHz, it never settles – never reaching the full supply voltage of 12V or ground level. But no harm was done to the chip despite attempting to push things around as much as possible. While the datasheet says “up to 15MHz switching speed”, this is obviously predicated on a number of factors.


Unfortunately, I couldn’t get a sharp transition from the signal generator for propagation delay measurements, but the on delay was about 50ms and the off was probably close to 70ns when measured with a supply voltage of 20V which is its absolute limit. The propagation time did not appear to change with regards to input voltage.
The driver used is an 8V UVLO version, which should cut-out at about 7V (downward) and restore operation at about 8V.
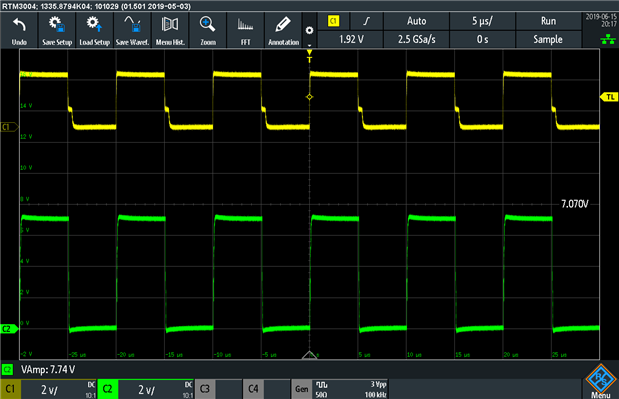

In the case of my driver, the unit cut-out at between 7.060 and 7.070V.

Operation was restored by 7.980V. This confirms the UVLO is operating as described.
The driver input also features hysteresis. In order to test this, I used a triangle-wave input (or as best as the RTM3004 could achieve) to detect when the input switches.

The unit appears to have a turn-on threshold of about 1.81V and a turn-off threshold of 1.68V. This corresponds well to the typical thresholds 1.7V and 1.5V respectively claimed in the manual.
The manual states that the minimum pulse width required to guarantee a change of state is 25ns. I tried to generate some rectangular pulses, but the RTM3004 was having some difficulty developing enough drive to make a nice pulse.


Indeed, with about 25ms, the unit still switches …

At about 23ms, it seems that sometimes it does … sometimes it doesn’t. Performing as promised.
The Infineon EiceDRIVER™ 1EDN TDI (1EDN8550B) is a rather innovative MOSFET driver with many advantages over conventional driver ICs that solve real-life problems. The truly differential inputs allow for the elimination of ground-bounce induced false triggering and the realisation of both low-side and high-side driving using the same type of IC. Capable of coping with static shifts of ±70V and dynamic shifts of ±150V, it is not only limited to low voltages and this demonstration board clearly illustrates this. The best part is that the driver does not sacrifice anything in terms of functionality, featuring class-leading specifications of 8A sink and 4A source capability and is competitively priced, similar to others in a similar performance category. It seems that it really doesn’t have any downsides.
The evaluation board works to illustrate the driver operating in a high-side configuration and its robustness to AC and DC ground shifts. It also allows for comparison with conventional drivers and performs as illustrated in the documentation, which is sufficient but unpolished. However, there are a few inconveniences with the evaluation board, which requires probes of a particular type for the included probe sockets, a certain amount of through-hole and SMD soldering, the use of unshrouded banana plug cables and installation of DAVE for programming of the XMC2GO board provided. Testing also requires an assortment of probes and careful attention to ground references, as well as a suitable 48V power supply.
If you believe Infineon, and you probably should, you probably won’t need one of these boards. Everything you need to know is in the documentation – including the results of some of the experiments. Instead, just grab a bunch of 1EDN8550B chips and go to town with your design, which might even be close to a drop-in replacement – I’m sure you won’t be disappointed based on what I’ve seen.
Thanks to Infineon (monichetti) and element14 (rscasny) for the opportunity to RoadTest this interesting device and evaluation board. Nothing was harmed (too badly) in the production of this RoadTest.
This update is especially for Jan Cumps, who made a comment on one of my status updates, seemingly frustrated that it was hard to write a "good" RoadTest report when it "just works". I normally beg to differ and tend to prefer it when things go smoothly, but that got me thinking about something that wasn't in my proposal that was perhaps worth testing. I have been thinking of testing this all along, but then, I decided not to actually do the tests just in case I couldn't make it before the RoadTest deadline. I don't want to ruin my reputation of being "on time".
The Infineon 1EDN8550B claims a tolerance of 70V static ground shift, up to 150V dynamic ground shift. The board as it stands really only pushes this to about 48V for the high side, plus another 10V or so with the DC ground shift knob turned to its upper-most extreme. Shall we see how much the driver has to deliver?

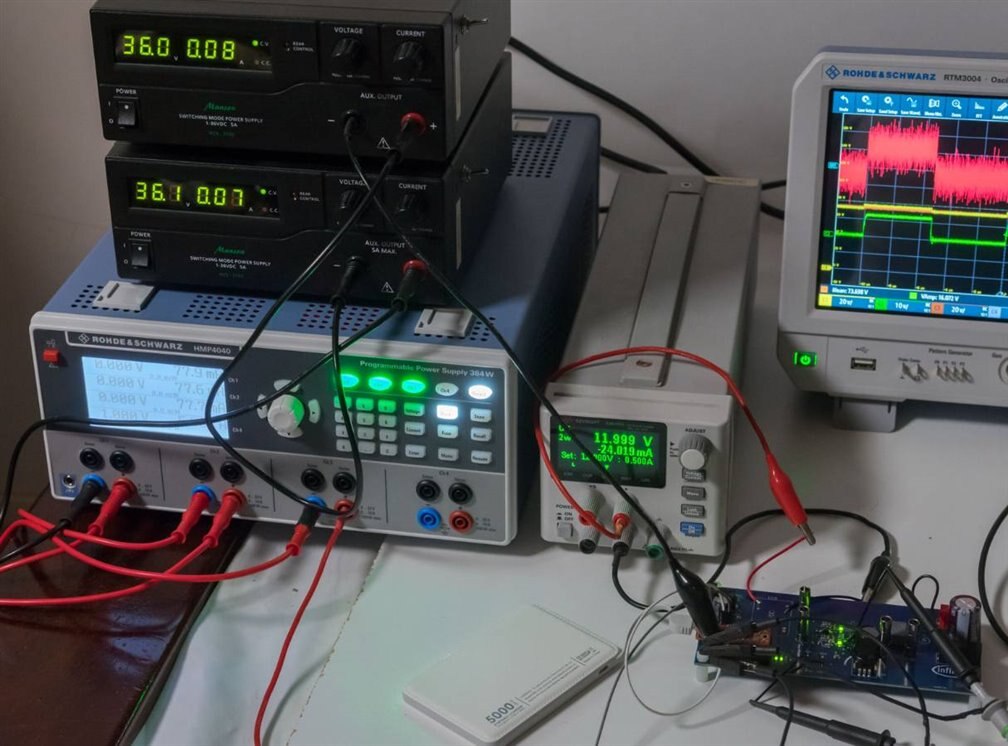
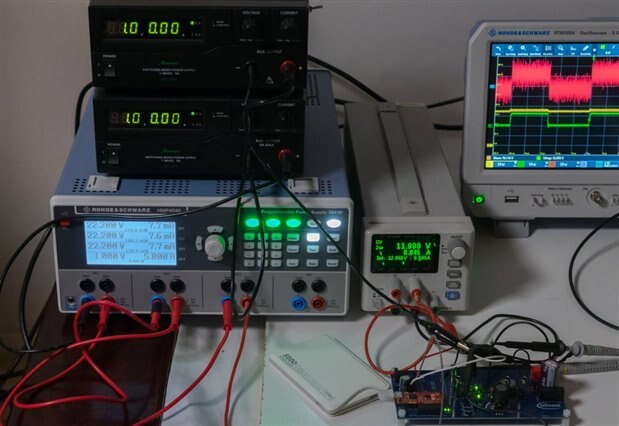
To do this, I had to enlist the help of every power supply in my (present) arsenal, as I may have to deliver up to 150V DC. The ground shift is done with three channels (0-32V) of the Rohde & Schwarz HMP4040 all in series, which are also in series with two separate Manson HCS3102 (1-36V) power supplies. This should give us about 168V when all dialled up to the maximum. The Keysight E36103A is used to provide the 12V to the MOSFET driver, with the board "frankensteined" as before. Because I've run out of power supplies to run the XMC2GO (and I wasn't going to risk hooking up a function generator to the driver input in case something goes wrong), I decided to use my least-favourite power bank to run it. By choosing the MOSFET driver ground as the measurement ground, I set up Channel 1 to monitor the XMC low-side signal relative to the MOSFET driver ground, Channel 2 to monitor the MOSFET driver output relative to the MOSFET driver ground and Channel 3 to monitor the XMC_GND relative to the MOSFET driver ground. By using a math function, we can get a fuzzy (due to choice of scale) check on what the XMC Low-Side signal is (i.e. the differential signal the MOSFET driver should be reacting to).
I decided to crank it up slowly and cautiously but ... eventually decided just to go for about 70V. But what's that? My 12V rail is sinking!?! Sinking current? That's impossible!
Actually, it turns out the power supply was not kidding. It's not a two quadrant supply, but it does sink a small amount of current for downward regulation purposes, and this was a bad sign. Within minutes, I found the reason ... the board began to emit that hot electronics smell.
It was a case of mea culpa (again). In modifying the board, I paid no attention to the existing DC ground shift circuitry. Because I hijacked the 12V supply from the Traco power DC-DC converter so that I could supply it directly, the -12V rail is no longer available. It also means that the opamp IC was probably very unhappy, especially seeing large differential voltages between its legs ... thus it got all hot and bothered! It also explains why I was supplying almost 100mA when it shouldn't have been much current at all as it would represent the leakage through the driver.
After getting out the iron, removing the opamp, J7 and C5 (to avoid any further potential "bangs"), we were back in business and looking a lot better.
A much more healthy 7.7mA was being metered, and the driver's consumption was about 45mA under the 100kHz switching duty driving an unpowered OptiMOS transistor. Much better.


The driver was able to cope with 48V without a problem - we already knew that. Increasing up to 70V was no problem either - it meets the brief just fine.
At 80V, it seemed to operate just fine as well, but by 85V, strange things began to happen. I noticed the XMC2GO's signal disappeared and the driver stopped until the voltage was reduced. Looking into the datasheet, the XMC1100 is only specified to handle 11mA per pin at most which, given the 7.7mA measured by the power supply providing the ground-shift of 70V, suggests we may have bumped up against this limit by the time we reached 85V.
As a result, I couldn't find the true limit of what the driver could handle - at least, not without some risk, so I left it at that. I wouldn't want the driver to short out and suddenly have up to 168V from five supplies in series suddenly applied to the Keysight unit that's rated for a 0-20V output! I didn't need a DC arc running in my room either ... or more dead power supply channels. But at least I tried, right?
I wanted to find the resistance between the driver output and the differential inputs - using a regular DMM, I measured about 1.98Mohm in one direction and about 3Mohm in the other. But this seems to be somewhat misleading, as perhaps the behaviour is voltage dependent - using my Keysight U1461A Insulation Resistance Test DMM, the 1mA output current trip point was reached at about 33V, reporting only about 250kohm. In reality, the resistance between the inputs and outputs probably decreases as the voltage increases. So if you must have isolation, perhaps this part is not fit for the role.
So all being said, the driver wins again - the claim of 70V static ground shift resistance was beaten, operating satisfactorily up till about 85V when the XMC2GO seems to have stopped generating the PWM signal.
I had a bit of a think about it during my sleep ... in my dream, I had an epiphany - the LEDs would have been drawing current from the I/O pins, so perhaps if we disable them by removing their associated resistors, I might get a better result.
After following through with that, this morning, the driver operated correctly up to a DC ground shift of 88V, after which the duty cycle of the output became erratic. Reaching 89V, the driver clamped in the off state despite the XMC2GO still dutifully pushing a PWM signal out. Thus I think I have reached the definitive limit for static ground shift and resulted in seemingly no harm to the driver. I think this will conclude my experiments with the evaluation board - it's now had quite a lot of components desoldered!




