RoadTest: RoadTest the Raspberry Pi 4 Model B (2GB)
Author: embeddedguy
Creation date:
Evaluation Type: Development Boards & Tools
Did you receive all parts the manufacturer stated would be included in the package?: True
What other parts do you consider comparable to this product?: Any single-board computer like Raspberrypi. others include Beaglebone, NVIDIA Jetson nano which I have recently got!!. But considering community support and ease of getting started RPI is the best
What were the biggest problems encountered?: Well, I don't like SD cards. The reason is it is difficult to flash every now and then and those are very fragile and get corrupted easily. Apart from that worst case is to deal with them while formatting them in windows.
Detailed Review:
RaspberryPi 4 in this case 2 GB is the latest line of product provided by the raspberry pi foundation. It has several new features added compared to the earlier versions. As one of the websites states this as follows....

The ultimate Raspberry Pi! The new Raspberry Pi 4 has up to 4GB of RAM, a faster quad-core CPU, supports dual display operation up to 4K resolution, Gigabit Ethernet, USB3.0, wireless LAN, Bluetooth 5.0, and power via USB-C. That's very close to a desktop PC!
The RPI4 needs a USB-C power supply.
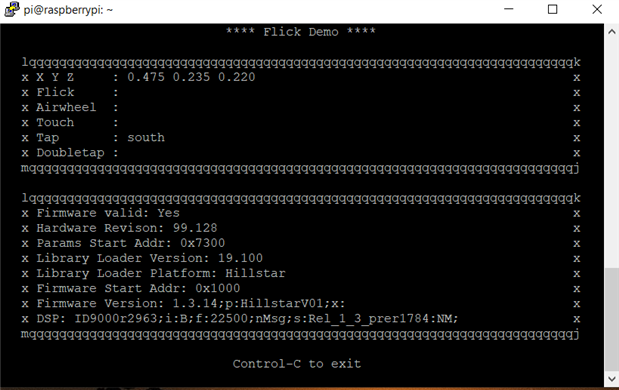
I have decided to try flickhat gesture sensor which has an MGC3130 gesture controller provided by microchip. It can detect several kinds of gesture sensing such as Airwheel, Touch, Tap, Doubletap, direction change etc. Basically flickhat transmits electromagnetic waves around the surface and when there is interference by certain kinds of gestures it gets detected by the gesture controller present on board.
The hat has I2C interface and it also has programmable EIO's which can detect kind of gestures. There is already software available for flickhat devices on the given link https://github.com/PiSupply/Flick
I have tried the basic example to see the X, Y, Z position of the finger and movement like north>south, east>west, etc. It is performing very nice.

Originally I was thinking to make some Yocto build for RPI-4 but due to some problems it was not possible for me, hence I give a try to Linux Kernel development. I will show you how to run a simple hello world program from the http://derekmolloy.ie/writing-a-linux-kernel-module-part-1-introduction/#prettyPhoto
First, you must search for Kernel headers
$ apt-cache search raspberrypi-kernel-headers
Then the next step is to install the kernel modules by the following command.
sudo apt-get install raspberrypi-kernel-headers
You can search for the active Kernel by typing uname -a command.
After that get the required files for this tutorial by typing the following
You should now go to the directory /exploringBB/extras/kernel/hello and type make you will be able to see hello.ko next time when you type ls.
now the next thing is to load the Kernel by doing
sudo insmod hello.ko
and remove the module by typing
sudo rmmod hello.ko
check the content by typing
tail -f kern.log
Oct 20 22:31:47 raspberrypi kernel: [33296.827042] EBB: Hello world from the RaspberryPi4 LKM!
Oct 20 22:32:21 raspberrypi kernel: [33330.100104] EBB: Goodbye world from the RaspberryPi4
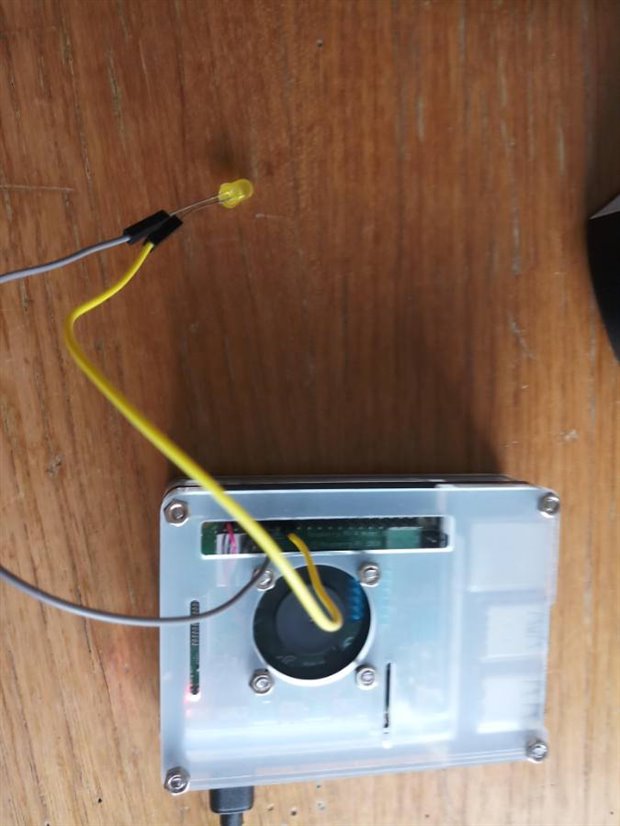
But all of the examples I have shown above are for doing some basic functionality. It is always good to do something in real-time. At the same tutorial link, I found an example for blinking an LED connected to GPIO using a push-button. The tutorials are for Beaglebone but after doing some changes they are also working on RaspberryPi's. One might argue that a sinple LED can be blinked on GPIO using GPIO functionality or any other program but doing it with LKM is a different thing. first LKM runs from Kernel space rather than user space and next is it has very less overhead. Next, I will show you how to do that.
The following is the original code from Derek Molloy's post. For RaspberryPi you just need to change the GPIO number in the file to 27(I am using GPIO27).
The next step is to make the project by going to the /exploringBB/extras/kernel/gpio_test $ directory and typing make command. Then the next part is to insmod the build kernel .ko file by typing sudo insmode filename. You will see that an LED will be blinking on the GPIO 27.

Overall it was a wonderful experience working with RaspberryPi 4 and especially running some of the LKM module examples. The RPI4 is fast compared to the previous versions of RaspberryPi's.
Next, I am doing some Neural Network stuff.............



