


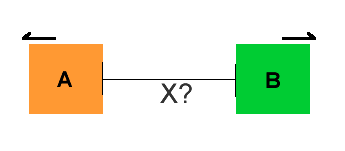
We have two blocks, A & B shown below, moving away from each other. How can one detect that the separation has reached a certain point, distance X in this case?
The most obvious solution is two rods, one on each block, that make contact when the distance is X. But this is a crude and cumbersome option. It's 2010, how about a high tech solution?
There is no right or wrong, just an excellent chance to work out the prefrontal cortex and showing off some creativity.

