


Doggo, a robot that can do acrobatics comes at an affordable price
Doggo can walk, trot, do backflips and even jump with ease and can prop itself back up if it loses its balance. (Image Credit: Stanford University)
Stanford's Extreme Mobility team has developed a four-legged robot that's capable of acrobatics, like backflips and can trot, dance, hop, jump up to 3.5 feet and even walk on rough terrain. The Stanford Doggo is available to anyone who can consult about comprehensive plans, code and supply list, all of which is online. Doggo's price is estimated at less than $3,000, including shipping/manufacturing costs. Students who developed Doggo built it with replicability in mind by using supplies that were easy to obtain and by testing each part as they were created. Doggo had trouble with maneuverability at first, but after some tweaks and experimenting, Doggo can maintain a consistent gait and desired trajectory. This is achieved with motors that detect if there is external force on the robot. It then determines the amount of force and torque that would be applied. The motors are speedy too, computing at 8,000 times a second and act similar to springs, setting Doggo in the correct position. Extreme Mobility is also teaming up with the Robotic Exploration Lab of Zachary Manchester to run control-based experiments. The team has also developed Stanford Woofer, which can carry up to 6kg of equipment and is twice the size of Doggo.
Bee+, a robot-like insect that flies
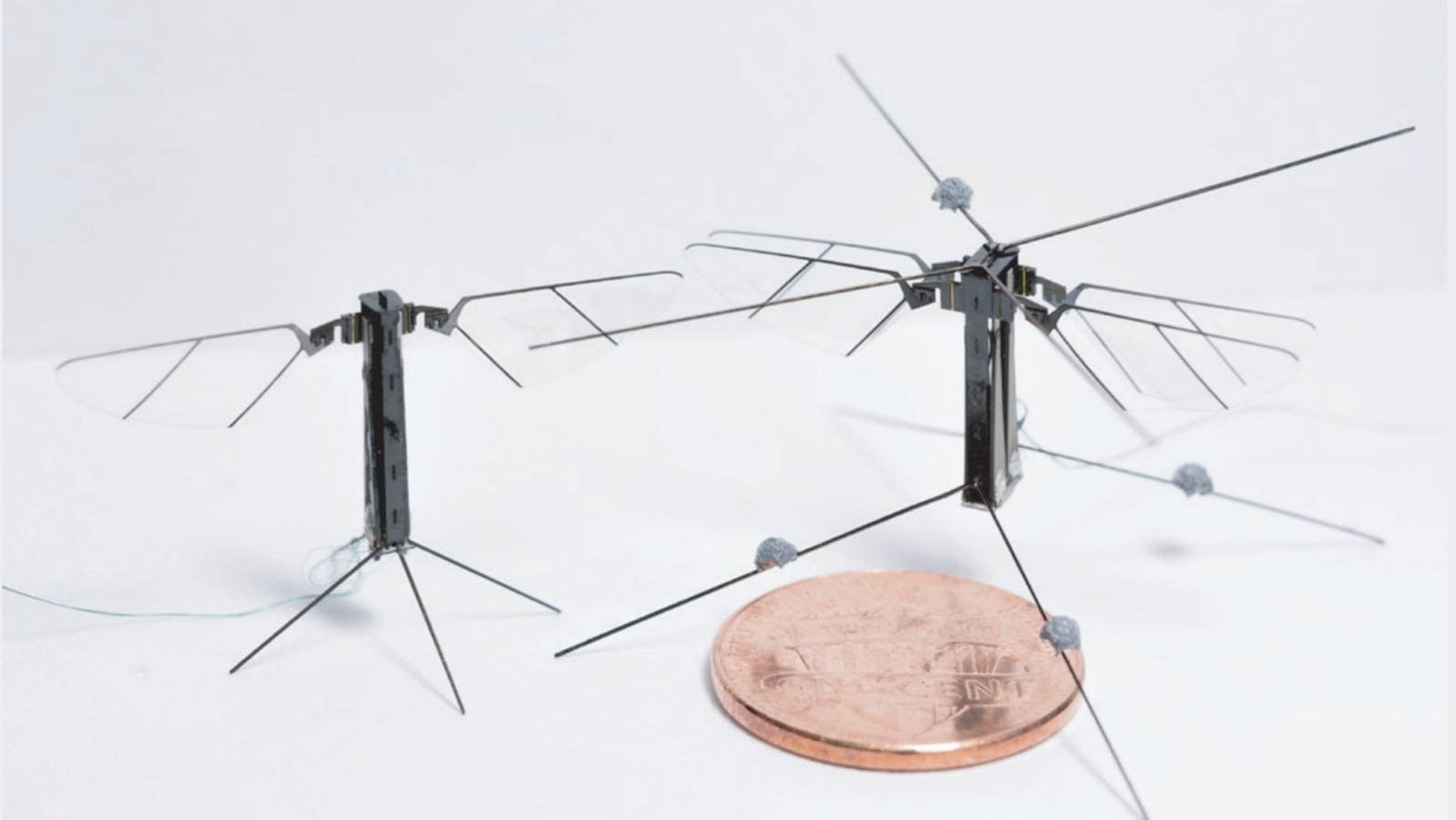
Bee+, a robot-like insect, has improved flight precision and control over actual insects. (Image Credit: Yang et. al./University of Southern California)
Researchers from the University of Southern California in Los Angeles developed a four-winged robot called Bee+, weighing at just 95 milligrams, the robot has the same flight agility and poise of actual insects. This was done by replacing older biomorph actuators, cantilevers constructed from two layers of piezoelectric material with a passive layer between the two, with unimorphs that contain one piezoelectric layer. All four actuators, when combined together, weigh half the size of the biomorphs at just 56 milligrams, making it lighter on the wings and improving flight control. Bee+ has the ability to avoid obstacles, perch, land and can even follow flight paths. It's also much easier to build than the previous RoboBee model, which only has two wings. The robotic insect doesn't run on batteries, but instead, it has a tether attached to its body. However, the robot's size is larger and heavier than most insects, even if it is a bit larger than a penny. Other tiny robots could benefit from the small size, making the size of Bee+ useful for different tasks like scouting areas that may have hazards and finding survivors in a disaster area, such as collapsed buildings. One of the bigger challenges with designing small robots is allowing it to carry a full payload as it fits in tight spaces.
RoboRaise could be a handy robot when lifting heavy objects
The robotic arm mimicks muscle movement by moving up and down as the human arm does. (Image Credit: MIT CSAIL)
Researchers from MIT's Computer Science and Artificial Intelligence Laboratory (CSAIL) have developed a robot known as RoboRaise that helps humans lift objects by observing their muscle movements. Using brain signals and hand gesture, the robot uses electromyography (EMG) sensors on humans biceps and triceps to monitor their muscular activity. RoboRaise then identifies the height of their arm, and from there, the robot can follow their movements as they raise and lower their arm. The system underwent experimentation by lifting and putting down mock airplane parts, with a 70% accuracy rate when responding to gestures. The approach used for humans lifting objects with robots is meant to be intuitive and similar to how one would lift objects with another person. They key to doing this is through arm movements that set instructions on how the robotic arm would lift higher or lower. Using muscle movement and signals to communicate makes the robotic arm seem like it's being controlled by the user. The team plans on installing additional sensors or reading more muscle groups in the future to improve RoboRasie's ability to carry out complex tasks. RoboRaise could be used on construction sites, manufacturing, or even as a helpful hand around the house when lifting furniture.
Spidey-sense sensorsin vehicles can prevent dangers

Spidey sense on the sensors could be beneficial for autonomous vehicles. (Image Credit: Taylor Gallery)
A team of researchers from Purdue University, Nanyang Technological University in Singapore and ETH Zurich have proposed installing sensors into autonomous machines. They would be akin to spider sense, allowing vehicles to process data faster than possible. The aim is to cut down on data load by mimicking the way spiders process information, so researchers will be developing a sensor that can achieve this feat. For example, the hairs on a spider will vibrate at a certain frequency, activating the mechanosensors whenever prey lands on its web. However, the mechanosensors don't have a reaction to the frequency whenever it senses dust has fallen onto its web. The team is designing their sensors in a way where they could either act as mechanosensors or a mechanoreceptor, the same way spider do when they switch between sensing and responding. Their sensors work by changing shape when triggered by an external force that fits a predetermined threshold. Conductive particles will be able to move together more closely due to the shape's change, allowing electricity to pass through it to create and send a signal. This lets the autonomous system know how it should react. The sensors can sense and filter things out quickly and can also compute without using a power supply. These type of sensors could help drones explore dangerous areas, and autonomous vehicles avoid danger on the road.
NASA's Bumble completes first hardware checkout aboard the International Space Station

Anne McClain performs tests on Bumble during a mission aboard the International Space Station. (Image Credit: NASA)
Robots may soon be helping take care of spacecraft. NASA's Astrobee robot, named Bumble completed its first series of tasks aboard the International Space Station during a hardware checkout. Bumble first launched to the spacecraft with Honey, another robot on April 17th aboard Northrop Grumman's eleventh commercial resupply services mission from NASA's Wallops Flight Facility in Virginia. The robots can return to Kibo, their docking station on their own to recharge when needed. Astrobee is a robot system that allows robots to float on their own and will offer a research platform for the laboratory. The system involves three robots with a docking station to recharge. Robots will aid in NASA's mission to return to the moon, along with deep space missions. Tasks will include tending to astronauts, and Astrobee's robots will be tested on how they can assist crew members. This will enable astronauts to improve their productivity and will help look after spacecraft when astronauts are not available near the Moon, Mars or other outposts in space.
Have a story tip? Message me at: cabe(at)element14(dot)com
Top Comments