


Electric motors are often at the spearhead of modern production systems, whether in metal processing lines, robotic machining cells, or building and office automation systems. The motors we see today have certainly benefited from advances in electric materials, manufacturing efficiencies, and analytical tools. However, their design principles have remained the same for over 100 years in the case of the workhorse asynchronous (or induction) alternating current (AC) motor. Rather, the remarkable performance of these motors in today’s applications comes from modern electronic controls — variable-speed drives (VSDs) — and accurate motor models whose sophisticated control algorithms can be rapidly executed by high-performance digital signal processors. Moreover, the development of VSDs has enabled the use of new AC motor technologies such as permanent magnet synchronous motors and synchronous reluctance motors.
Initially, direct current (DC) motors drew the attention of drive engineers. With an even longer history than AC motors, DC motors offered inherently simple speed and torque control. However, higher motor cost, more complex construction with a mechanical commutator, and brush maintenance issues were some tradeoffs associated with DC motors.
AC induction motors offered simpler, rugged construction, lower cost, and posed fewer maintenance concerns — characteristics that have led to their wide usage with a huge installed base worldwide. On the other hand, control of induction motors proved to be complex. Accurate speed control, and particularly torque control, remained elusive for early AC drives. Naturally, the goal of the early designers was to emulate in AC drives the DC drive’s simple control of motor torque by using armature current. Over time, AC drive designs have evolved offering improved dynamic performance.
PWM AC Drives Are Introduced
Most high-performance VSDs in 1980s relied on pulse-width modulation (PWM). However, one consequence of using a modulator stage is the delay and a need to filter the measured currents when executing motor control commands — hence slowing down motor torque response. In contrast, ABB took a different approach to high performance AC motor control. AC drives from ABB intended for demanding applications use an innovative technology called direct torque control (DTC). The method directly controls motor torque instead of trying to control the currents analogously to DC drives. This means better accuracy in matching the load requirements of the driven system. DTC further eliminates the need for an extra modulator stage and thus achieves control dynamics that are close to the theoretical maximum.
Direct Torque Control
In principle, DTC was already a leading technology back in 1995, but subsequent developments in processor computational power, communication interfaces, application programming, etc., have enabled higher performance, providing premium motor control for a broad range of applications.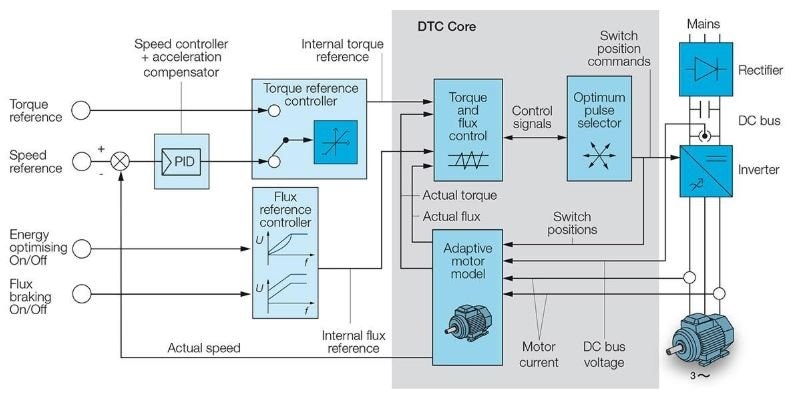
DTC’s core is the torque control loop, where a sophisticated adaptive motor model applies advanced mathematical algorithms to predict motor status. Primary controlled
variables—stator flux and motor torque—are accurately estimated by the motor model using inputs of motor phase currents and DC bus voltage measurements, plus the states of the power-switching transistors in the drive. The motor model also calculates shaft speed. Temperature compensation helps to enhance calculation accuracy without an encoder.
Other Benefits
In a larger view, benefits of DTC extend to software, user interfaces, maintenance, and system-level features. As the name suggests, DTC seeks to control motor flux and torque directly, instead of trying to control these variables indirectly like DC drives and vector-controlled AC drives do. Separate torque and speed control loops make up the full DTC system but work together in an integrated way.
Additional motor parameters are automatically fed to the adaptive model during a motor identification run when the drive is commissioned. In many cases, appropriate model parameter identification can be done without rotating the motor shaft. For fine tuning of the motor model, which is only needed for few high-demand applications, the motor has to be run, but then only for a short time and without load.
Stator resistance (voltage drop) is the only and easily measurable parameter needed for estimating the motor’s magnetic flux. Motor torque can then be calculated as the cross product of estimated stator flux and stator current vectors. While stator resistance is the main source of estimation error, its influence diminishes with increasing motor speed and voltage. Thus, DTC has excellent torque accuracy in a wide speed range. Moreover, DTC includes advanced ways to minimize estimation error at low motor speeds.
Output signals from the motor model — which represent actual stator flux and motor torque — go to a flux comparator and torque comparator, respectively. These separate control units compare their inputs to a flux and torque reference value. Already in mid 1990s the first DTC controlled drives performed these functions every 25 microseconds (µs) using a high-power digital signal processor (DSP). In the latest control generation the interval is reduced down to 12.5 µs, thus further enhancing control performance. Each comparator seeks to hold its respective flux or torque vector magnitude within a narrow hysteresis band around a reference value. DTC’s fast torque response without overshoot comes, in part, from ability to minimize these vector fluctuations.
Exceptional motor response is also due to the DSP control algorithms updating the adaptive motor model at the same high cycle rate. Flux and torque errors — differences between estimated and reference values — and the angular position (or sector) of the stator flux vector are used to calculate flux and torque status in the hysteresis controllers. Then, these status values become inputs to the optimum pulse selector, where the optimum voltage vector is selected from the look-up table. In this way, the most appropriate signal pulses for each control cycle can be sent to power switches in the inverter to obtain or maintain precise motor torque.
A form of programmable logic — so-called field programmable gate array (FPGA) — assists the DSP with determining inverter switching logic and other tasks. The FPGA allows for control modifications or drive design updates versus an application-specific integrated circuit (ASIC) which, if used, requires locking-in the design. The speed-control loop, which comprises the rest of DTC’s functional blocks.
Conclusion
DTC provides customers superior performance features over competing drive methods. Being a “sensorless” (speed estimation instead of measurement) control method from its foundations, costly motor speed or position feedback devices are not needed in most cases. Depending on motor size, static speed accuracy as low as ±0.1% is typically obtained. For higher demand applications, a DTC drive equipped with a standard encoder (1,024 pulses/rev) typically achieves ±0.01% speed accuracy. Dynamic speed accuracy (time integral of speed deviation under a 100% load impact) is 0.3–0.4 %sec with typical equipment driven by the motor. Using an encoder, speed accuracy typically improves to 0.1 %sec and matches servo drive accuracy. (Source: ABB)
AC Drive with DTCAC Drive with DTC
| ABB_WhitePaper_DTC_A4_20150414.pdf |

Top Comments
-

genebren
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

genebren
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children