


With soft robotics and wearables becoming an increasingly competitive field, researchers are scrambling to discover new materials that will push the technology to the next level. One major hurdle that has to be overcome is how to create a material that can simulate the same sensitivity characteristics of human skin, and while so-called “tactile skin” currently exists, it requires a nest of semi-rigid wires to function. The problem with rigid wiring is that it’s messy, induces interference and noise into the system, and prone to failure when placed inside a flexible object such as rubber and fabric. Now a team of researchers from Carnegie Mellon University has developed a new material that comes close to the goal of a highly sensitive synthetic skin that is not constrained by hundreds of wires.
"The wires might be fine inside hard cases such as smartphones and other devices, but if you're talking abou1t fabric, skin or something else that's soft, then suddenly all those wires become sources of failure," said Carmel Majidi, an associate professor of mechanical engineering.
The team has developed a new type of soft skin using a type of silicone rubber that has been impregnated with microscopic magnetic particles. This new material is permeated throughout with millions of nano-particles that have a positive charge on one end, and a negative charge on the other end. When a piece of the material makes contact with another object the fabric flexes and those magnetic particles move which changes the magnetic field around the area that made contact.
The change in the magnetic field can then be detected by an external magnetometer or even one that is embedded within the material itself. The data collected from the magnetometer can then be analyzed to pinpoint the location of the contact as well as the force that was applied, much like how our brains sense touch and force on our own skin.
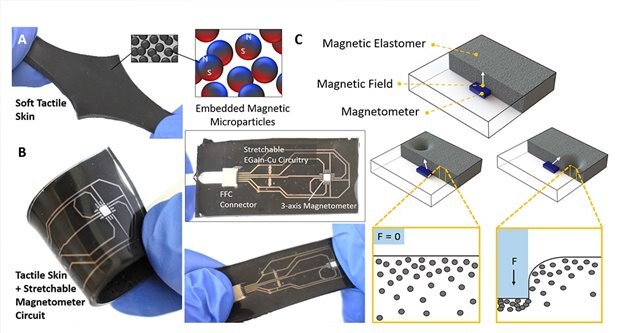
A diagram shows the components of the soft magnetic skin. (Image Credit: Carnegie Mellon University)
"I think force and contact are the two key interests for most skin sensing because our skin can do that too," said Hellebrekers, a doctoral student in robotics at Carnegie Mellon. "I really like this system because we can measure the magnetic field without any electrical interface. That gives us a lot more freedom in designing the kind of interface that is going to be much more easily integrated into different systems."
However, unlike our own skin, this new magnetic skin is able to sense changes in the magnetic field without making physical contact with anything, a property inherent in magnetic-based sensors. This feature has virtually unlimited potential where soft-robotics are preferred over traditional rigid robots. One such example can be found in the medical field. Doctors are increasingly relying on soft robotics to develop less invasive surgical procedures, and the ability to have a human-like touch sensor that requires very few wires could lead to major breakthroughs in how surgeries are performed. "A material like this would potentially be a breakthrough in areas like robotic endoscopy where you want to introduce sensing functions but don't want to use bulky electronics and a ton of wiring," Majidi said.
Moving forward, Majidi says that the team of researchers will continue to develop this technology, and in the short-term will be studying how to detect force along the length of cylinder-shaped objects, similar to the shape of modern catheter endoscopes. Another goal is to expand the sensing areas of the skin. Currently, the magnetic skin can localize contact over a continuous 1.5 cm² area. One way they hope to achieve this is by developing new magnetic microparticles that can produce a larger magnetic field. Another idea is to optimize magnetometer placement and resolution.
All of the recent breakthroughs in soft robotics really excites me for the future of electrical engineering, and medicine. One day we might be able to release a microscopic robot into one’s body, and through the use of highly-sensitive synthetic skin, we might be able to precisely remove cancerous tumors, parasites, and maybe even pathogens. What applications do you see for this new type of synthetic skin, and how might it change the future of robotics and medicine? Do you see any applications outside of medicine for this new technology? Let me know by leaving a comment below!
Source: https://www.cmu.edu/news/stories/archives/2019/september/soft-sensing-solution.html
Top Comments
-

dubbie
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

dubbie
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children