hi
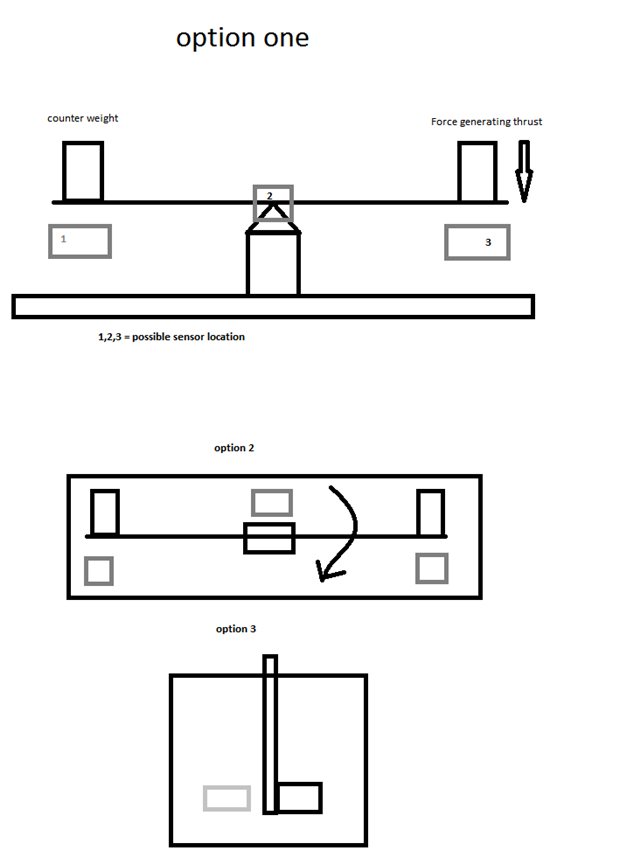
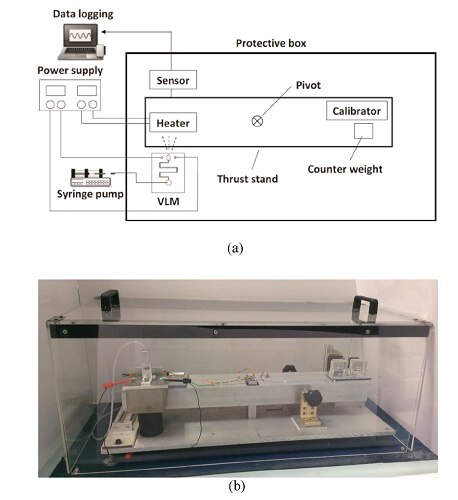
i am looking to make a non contact or contact based position sensor to use as way to measure force in mN scale.
i am totally new to this field, and looking for suggestions about sensor selection. And most importantly, How do i know resolution of each sensor ? it is not given in tech files.