


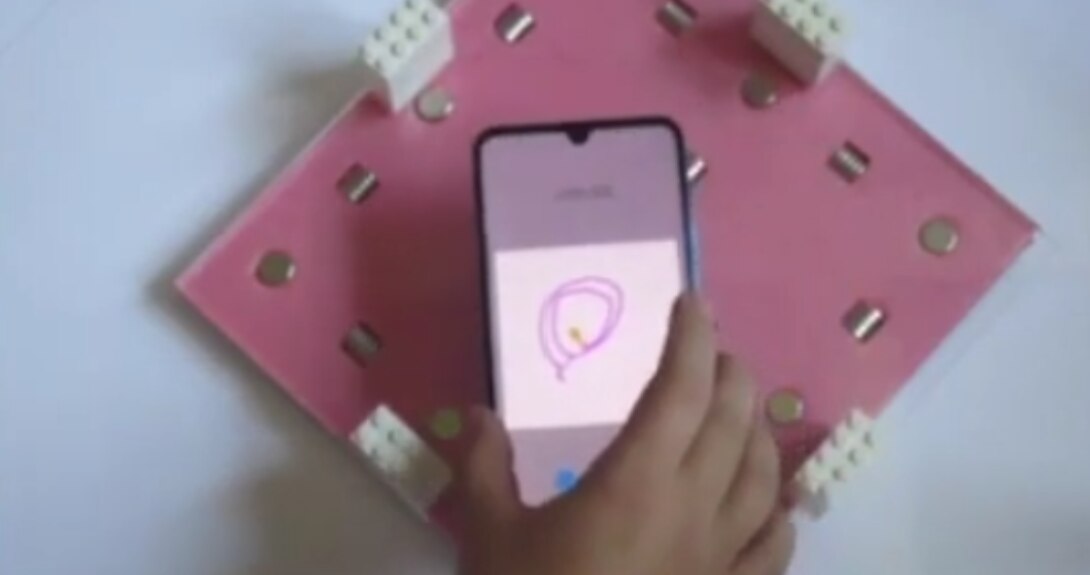
The team used magnets on a plane and a three-axis magnetic sensor to track a magnet's position. (Image Credit: ACM SIGCHI)
Researchers from Ochanomizu University and other institutions created FieldSweep, a 2D tracking system on a plane that utilizes permanent magnets and a smartphone. Their technique tracks the smartphone's position while it slides above the magnets. The three-axis magnetic sensor measures the plane's magnetic field, which was produced by the permanent magnets. It also predicts the magnet's position from the 3D vector of the measured magnetic field lines. Potential applications for this system include multiplayer games and see-through wall images.
The plane's magnetic vector field data is stored above the magnets. The data is a 2D array of 3D vector values. The team created a magnet configuration and placed a smartphone at a distance matching the simulation.
FieldSweep is calibrated with the ambient magnetic field since it establishes noise in the measurement. This ambient field is measured and subtracted from the value before tracking. As a result, the intended magnetic field is sufficiently larger than the ambient magnetic field, achieving stable measurement. In this sensor, the team used five disks of 13 mm x 2 mm neodymium magnets.
The magnetic vectors' measurement, performed at 60Hz, was achieved by mounting a three-axis magnetic sensor on a Huawei P30 Lite. Noise sourced from the sensor's measurement error was reduced by smoothing the measurement with a moving average filter. The team collected 60 data points for the most recent magnetic data measurement.
The researchers noted that there are areas where it has a weak magnetic field, and the geomagnetic influence cannot be ignored. To solve this problem, they performed a calibration by maintaining the smartphone's position and direction for one second in the same place as it's being measured before beginning the measurement. Then, these values were averaged and subtracted from the sensor's value during tracking. A program was also utilized to help detect the smartphone's position.
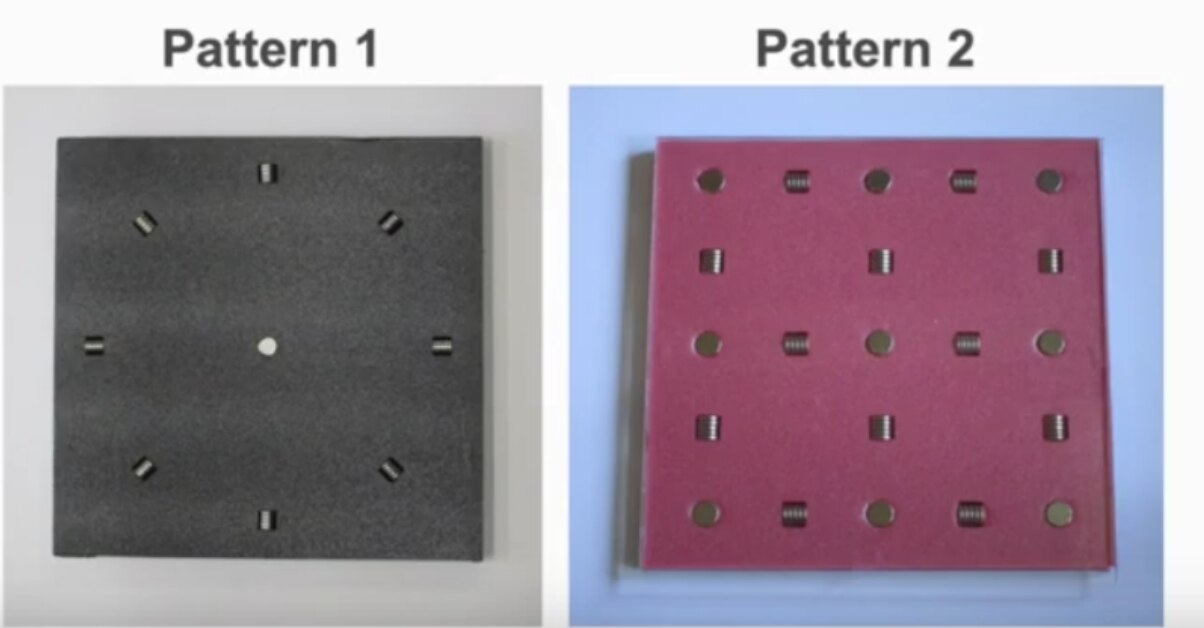
Two different patterns were used in the experiment. (Image Credit: ACM SIGCHI)
An experiment determined the accuracy of this prototype. The team used two different patterns on a grid of points with 40mm spacing for the first pattern and 20mm spacing for the second pattern. Then, they measured the distance between the estimated and actual positions for both patterns. Afterward, they randomized the order of measurement of each grid point. From there, they ran the program and discovered that the smartphone moved so that the sensor was positioned above the grid point to be measured, which also estimated the position. This was done for every grid point according to the measurement order.
In this project, the team integrated FieldSweep into a magnifying glass. Tracking was performed on a sheet of paper with images and letters. Only part of the image that's similar to the enlarged paper at the sensor's position is displayed. This can also be used in a live translation application. It can display images from a camera on the other side of a wall or door and have applications in multiplayer games. The researchers state they want to improve the magnet layout, position estimation algorithm, and application.
Have a story tip? Message me at: http://twitter.com/Cabe_Atwell
Top Comments
-

dubbie
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

dubbie
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children