


| Previous Blog |
|---|
| Project R.A.G. - Blog #9 - Water & Rail Module |
Blog #10 - Mechanical Build P3 (Final)
1. Introduction
Hi! This will be my tenth blog for the 1 Meter of Pi - Design Challenge. Finally the magic number 10, this is the third time I'm able to reach the number 10 on a design challenge and it really took a lot of time and work. But it's not all done yet, so let's get into this blog. In the last blog I covered the last module I will be making for this project and that being the Water & Rail module, you can find that blog linked at the top and at the bottom of this blog. That module is multi purpose and it's use is for moving the robot up & down the rails, controlling everything about the tool on the top of the robot head and also take care of watering the plants. Happily, after correcting a few tiny mistakes, everything worked great! In this blog, I will finally finish the mechanical build for this project. Before I get into plans for this blog, let's see what I've done so far on this aspect.
2. Previously done
I've tackled the mechanical build in 2 of my previous blogs, blogs #6 & #8. I'll link those blogs in the next section. By the mechanical build, I'm talking about the main construction of this project. The rails that the robot rides on, the LED strip carriers and so on. Before I get into the build for this blog, I'll just shortly go over what I've done in the last 2 mechanical build blogs.
Blog #6 --- Mechanical Build P1
First mechanical build blog was the blog #6. In that blog I went over my main concept idea for this competition and what I envisioned in the beginning. After that, I showed how I designed the rail system for the robot to move on, from the L brackets that hold together the whole frame to wheels and to the legs for this project. In the end I tried running the robot on rails, but ran into some electrical issues so I had to stop there. In the end, this picture can sum up pretty good how far I've come in that blog.
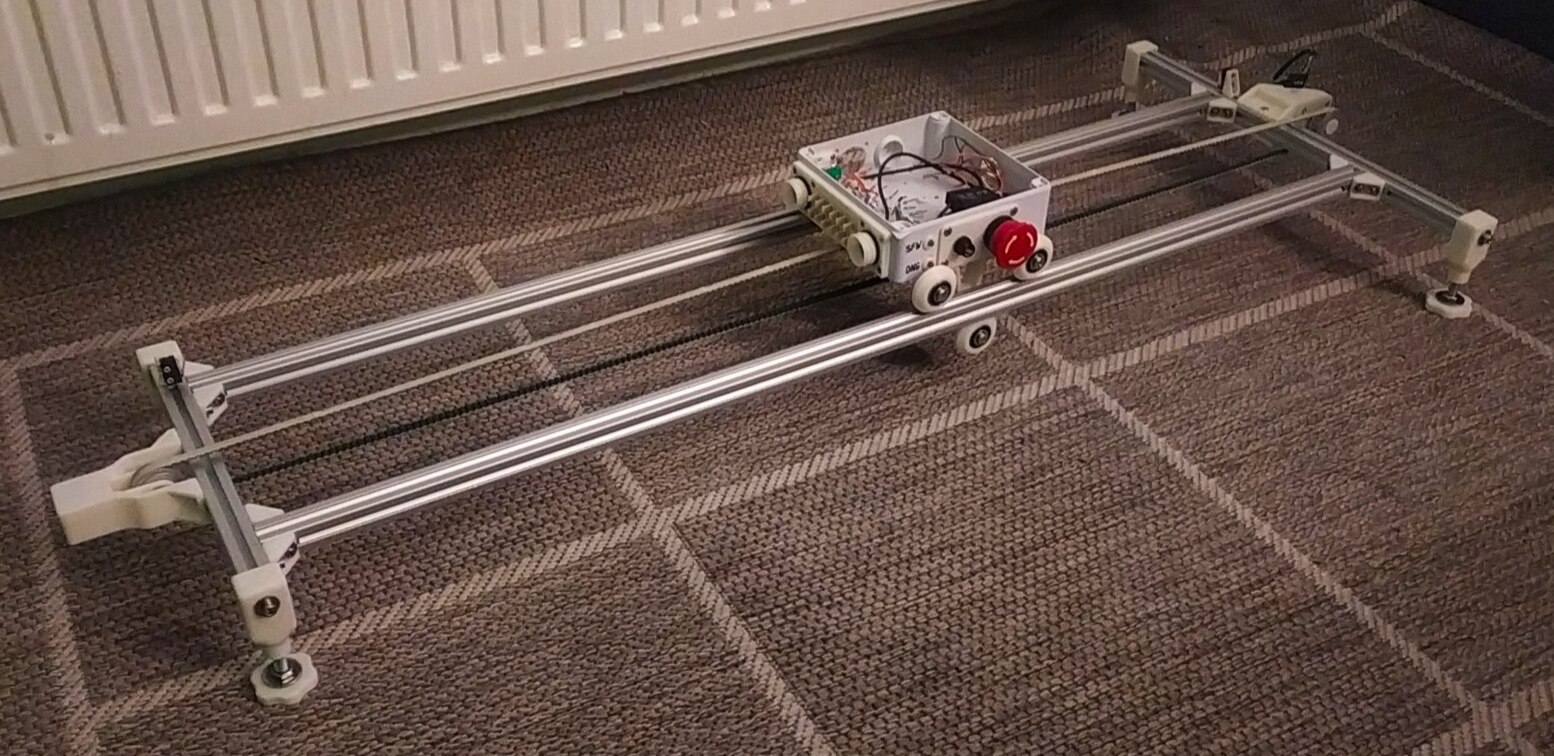
The cart was mounted as well as the first motor and the belt tensioner. But the movement mechanism had issues both on the mechanical (too tight of a belt) and on the electrical side. There was also a problem with the robot that I haven't discovered at that point, but will discuss in the blog #8. If you want to check out this part 1 of the mechanical build series, you can find it here: Project R.A.G. - Blog #6 - Mechanical Build P1 - Robot On Rails .
Blog #8 --- Mechanical Build P2
In this blog, I set out to address the issues that I've discovered in the blog #6 and later while working on this project. There were 2 main issues here, the issue with the rail system and the issue with the robot. Those 2 combined are the whole movement system for this project, so it was essential I address it as fast as possible. With some reading around I've found that the big issue for the rail system for me was that I wasn't protecting the stepper motor driver properly. To fix that, I've found an easy solution with a few additional components to fix that and also switched to a new Nema17 stepper motor. The other issue was that the robot arm had an adapter plate on the motor which teeth grinded down completely, in other words, that join of the robot was useful. For that I did some modifications and 3D printed a new custom adapter plate. The end result can be best summed up by a video that will be under this. If you're interested in more detail about this blog, you can find the blog here: Project R.A.G. - Blog #8 - Mechanical Build P2 - Robot On Rails .
3. Plan for this blog
With the last 2 blogs covering the mechanical build summarized quickly, it's time to turn our attention towards this blog. In this blog, I will cover the rest of the mechanical build for this project. There isn't a lot left for the mechanical build, the complicated part with a lot of to go wrong was in the blog #6 and a lot did go wrong as you could see. Let's take a quick look at the things I wish to accomplish in this blog:
- Mount the lights to the already existing chassis
- Position the pots and the watering container
- Mounting and positioning of the electronics
The easiest of these 3 will be the second task, and that is positioning the pots and the watering container. Because I didn't have time to and construct special boxes for planting for this project, I had to go to the local store and see what they have that I could use for this project. I either needed to really long things, or a couple of smaller things that can fit easily next to one another. I went with the latter as you will se later in this blog. For the watering container I will go with a big glass jar that I've showcased in the last blog. While it may not hold enough liquid for this system to be used for any extended period of time, it's more of a proof of concept. This whole construction can be mounted on top of a big water container.
This brings us to the other tasks on the list, mounting the lights and mounting all of the electronics. I approached this by first going over the design for the mounting system for the lights and then adapting the electronics so they can mount to that structure. In that way, I only need to build a single construction and won't end up with a double mess. Let's first look at some requirements for mounting the lights and then see what's the best option for that. The place where we need to start is an overtop view of the project.
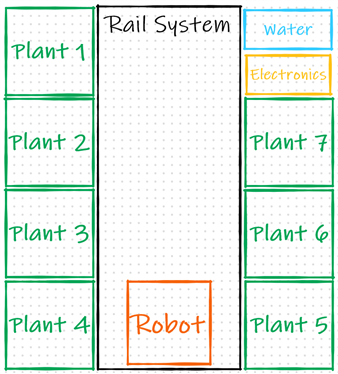
In the middle, we have the robot on rails going up and down, while on the sides, we have the plants, water and electronics. While our astronaut/artist loves being in the spotlight there isn't a point of running a LED strip directly above the middle since that won't be optimally used. A better option would be to have a dual light set up, one set going over one row of plants and the other set going over the other row of plants. On the diagram that would end up looking something like this.
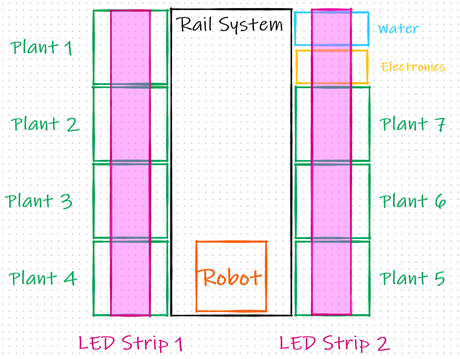
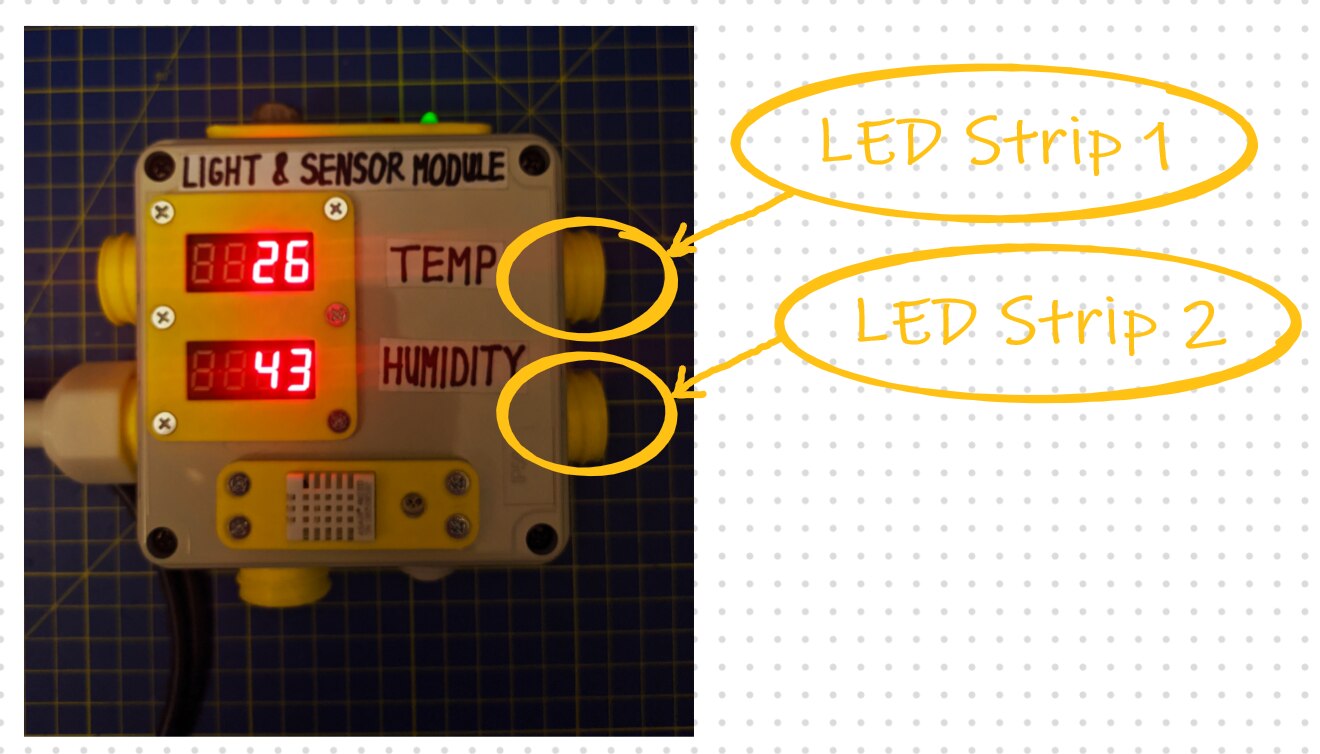
In this way, we will have the best coverage for all of the plants. If we take a look back at the Sensor & Light module from my blog #5 which you can find here: Project R.A.G. - Blog #5 - Sensor & Light Module , we can see that I made that module able to control 2 different LED strips and this here is the reason.
While controlling a single LED would be sufficient, in this way, if we plant in the 2 rows 2 different kinds of plants, where one of the rows wants more light, while the other one wants less light, we can easily adjust that by having them individually controlled, it just gives us a bit more flexibility. Now that we covered the configuration for the lights, how do we mount them? My idea for this is to make a structure that would attach to the structure that I've already made with 2 aluminum rails going over the plants. We have to make sure that the rails are high enough so that they don't interfere with the robot or the plants and of course, that the construction is sturdy enough. I could have maybe used wood for this part of the build, but I choose to go with aluminum since the aluminum rails will act as big heatsinks for our LED strips. After finishing that construction, I will design special mounts for the electronics to mount to that structure. Let's begin with designing the light construction first.
4. Design
To begin this design I first had to go and look around for materials that I was going to use. I stated above that it would be preferable to go with aluminum instead of wood because of the cooling for the LED strips and also I couldn't go and buy more of the 20x20 extrusions as the cost for that would be too high without any needs for it, since this structure is supposed to support just some lights and electronics, which doesn't mean it shouldn't be sturdy of course. Let's take a look at the materials I managed to find that I will use for this build.
Materials
First off, I will be using 3D printing, but only for the joints and connection, since I don't see a point in printing large objects if they are simple shapes that can be bought for not a lot of money in a store. I went through my garage to look for materials I could use and I was in luck. There were some renovations done to the heating system and the kitchen this year so there were some left over aluminum rails as well as heating copper pipes. The pipes were 15mm copper pipes, while the aluminum profiles are 30mm wide.


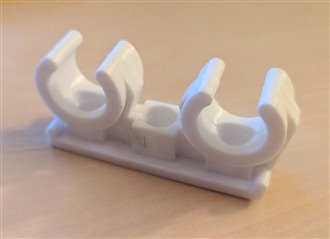
On the left, you can see the difference 15 minutes and some scotch brite can do to the copper pipes and on the second picture, you can see the aluminum rails that will be holding the LED strips, as I've already mentioned, the rails are 30mm across, which is great, since the LED strip is 10mm wide, so I can easily fit 2 rows on each of the rails. Besides these, I will be using store bough copper pipe mounts, since they are made out of extremely strong plastic, and are already made for this diameter of the pipe and of course the waterproof LED strip.
Light mount structure
With the materials sorted out, it's time to look at how I'm going to utilize them. In each corner of my rails construction I want to have one of the pipes going straight up as a column and them being connected by a shorter piece of pipe o top and then, those 2 structures connected together using the aluminum rails. This is the simplest possible construction with the least amount of material used. For connecting the pipes to anything pretty much, I will be using the store bought mounts.
But, they will only be a part of the connection. I'll now go over designing the adapter which I used to put this whole thing together and after that I will go over the assembly of the whole thing.
3D printed mounts
For designing these mounts I used Fusion360 and I printed them out on my Ender3 Pro at standard quality settings, 205C nozzle, 60C bed, 0.2mm layer height, 0.4mm nozzle. You can find all of the models I made for this project on my GitHub that is linked at the end of this blog, or if you are just interested in the parts that I designed for this blog, you can find those here:
| {tabbedtable} Tab Label | Tab Content |
|---|---|
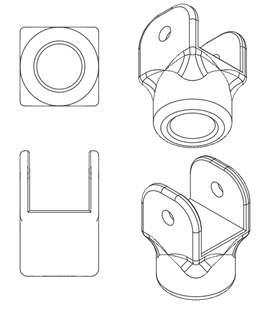
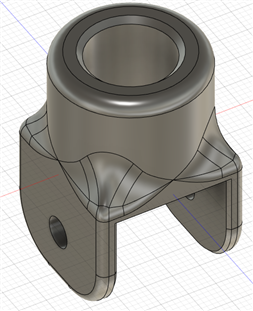
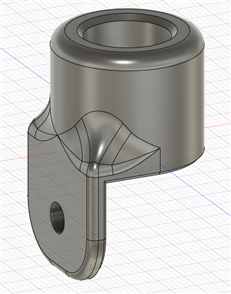
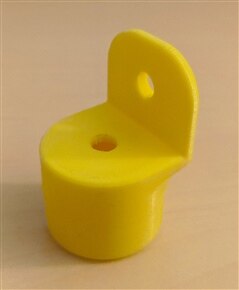
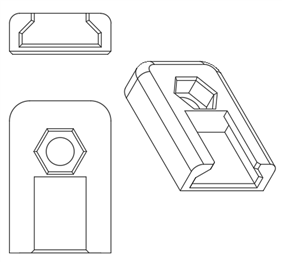
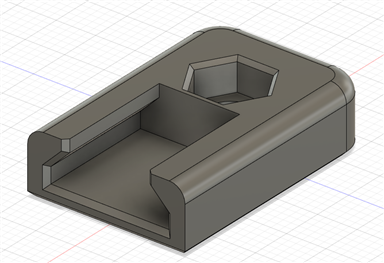
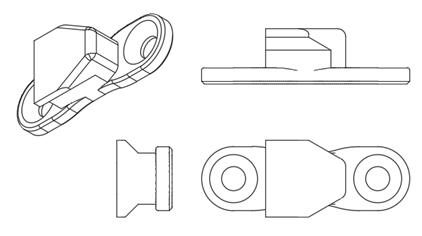
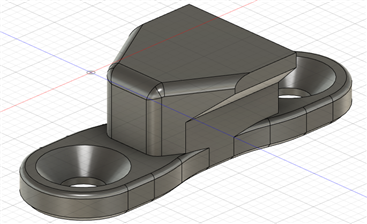
Mount 1 | This is the first of the 3 mounts. This mount will be used to mount the 15mm copper pipe to the 20x20 extrusion. For mounting the pipe to the adapter itself I decided to go with a press fit, since there won't be a lot of force on that part, as for mounting it to the 20x20 extrusions, I left holes for 2 M5 screws to tighten everything up, here is the model.
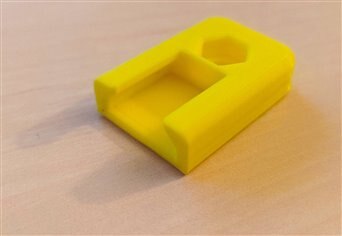
To make this a press fit with the copper pipe, I put the tolerances pretty low, while the copper pipe is 15mm outside diameter, the inner diameter of the hole on the mounts is 15.2mm. It required a bit of post processing to get the elephant foot gone, but after that, the fit was great, here it is how it turned out.
|
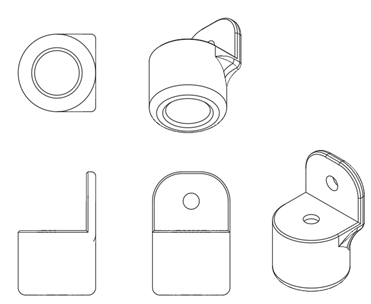
Mount 2 | The second mount is a copy of the first one with one of the legs cut off and an additional hole added through the center. This mount will go on the side where the cable tensioner is since there isn't enough space for the first mount.
To print it without supports, I had to fill the hole that goes through the center with a 0.4mm layer, this allows the slicer to approach that whole area is a simple straight overhang without any holes in the middle, getting through that is easy with a screwdriver or a drill bit.
|
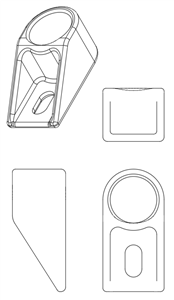
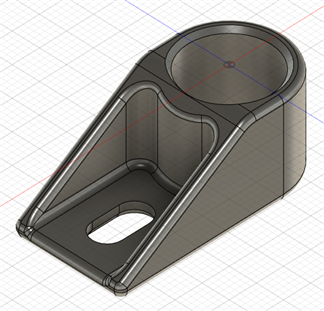
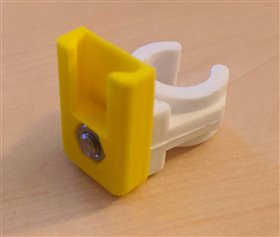
Mount 3 | The last mount is the mount that goes on top of the all 4 copper pipes. It's function is to be adjustable and for me to able to mount the white pipe holder I've pictured above. For attaching to the pipe, I went with another press fit with a small segment for screwing on the pipe holder.
|




Those are all of the mounts that are needed for the main construction, the only thing left to design is the mount for mounting the electronics to this construction. I will show how I designed that and then I will go to the assembly of the whole thing.
Mounting the electronics
I want to mount the electronics to the copper pipes too, so, I will be using those white mounts again. The way I want to mount the electronics is that I don't use any screw, but rather just slot the electronics in. I won't do anything fancy with any kind of a latching mechanism, I'll just rely on gravity, if I see that it's not good enough, I'll upgrade the design. There are 2 parts that need to be designed here, one for the pipe and the other one for the modules.
| {tabbedtable} Tab Label | Tab Content |
|---|---|
Pipe mount | This will be the mount for mounting to the pipe. It's a simple design, it has a hole for an M5 screw and a slot for a M5 nut to tighten the white mount. Besides that, it just has a feature on one side into which the other part of the mount needs to slot in.
I printed it as shown in the second picture, the overhangs on the picture are 45 degrees, so it can be printed without any supports no problems at all. It's a fairly shorty print at around 20 minutes, here is how it turned out.
|
Module mount | This is the mount that is supposed to go on the module. Since all of the modules are those electronic boxes with thick plastic walls, I decided to attach these mounts with 2 M4 screws by tapping to holes. Again, it's a simple designed made according to the design above.
This part has the negative of the feature of the other part, which will help them stay together, I've put a tolerance of 0.3mm on that feature so it can go in easily. I could have gotten away with 0.1-0.2mm tolerance using my printer, but this was sufficient. Here is the end result.
|


With that, we have all of the mounts designed. I printed all of the needed mounts during a single day and cut the pipes and aluminum rails to the required lengths, the only thing left is to assemble the whole structure and then to finally turn on the the lights, to see how it all looks put together.
5. Assembly
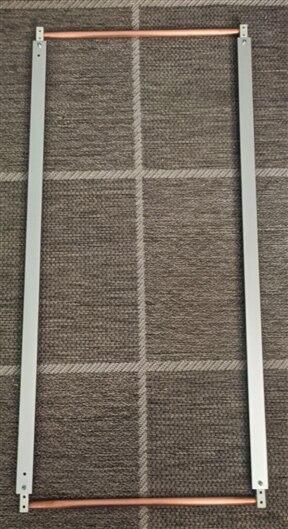
I began the construction with the top frame that will hold the LED strips. That meant I needed to mount the white pipe mounts to the aluminum rail. I just drilled a hole at the center of the rail that was big enough for an M5 screw. To tighten the mount I used a M5 screw and a locking nut to keep it secure.
I had to move this a bit further down the rail later on, to get the alignment correct. After doing this on both sides for both rails, it was time to construct the whole top frame. The copper pipes which were used were 47cm in length. I chose that length, because that was the measurement I got when I wanted the lights directly above the plants. After assembling that part, I added the LED strips, they of course have the self adhesive backing which made this really easy.

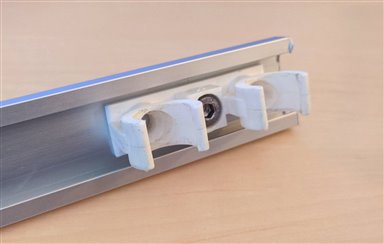
The pipe on the first picture here looks really bent, but it's straight, no clue why it ended up looking like that in the photo. After this was done, I mounted the 4 copper pipes to the 20x20 extrusions. I mounted them at corners to give as much stability as I can do to the overhead light structure that we see here. On the motor side where we have more space, here is how the pipes look mounted.
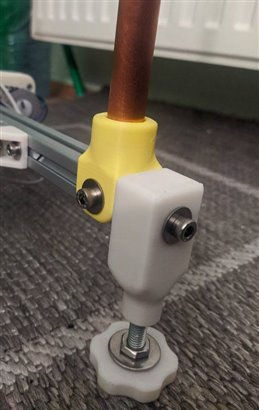

The dimensions of the mount are almost exactly the same as the dimensions of the leg, if I had designed this all at once, I could have put a hole on the top of the leg mount for the copper pipe to have even more stability, but this works great, specially when I tightened the screws properly. Next thing I mounted were the other 2 copper pipes at the other end where the belt tensioner is.
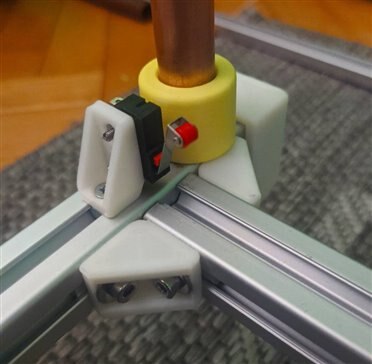

There wasn't enough space on the first picture as it was originally mounted, so I had to rotate the microswitch so everything could fit, even then, it's a really snug fit. You can see on the first picture why I had to make it with only one leg, the L bracket was where the other leg had to go, but the screw that goes through the center secured the mount to be sturdy. The last of the mounts was the one that goes on top, and I just pushed into place with a tiny bit of persuasion using a mallet.

Besides that, here is the mount for the modules as the final piece of this assembly as well as the Sensor & Light module mounted on one of the copper pipes. It will be on the different side from the main box, so the sensors can be further apart and gather data like that.


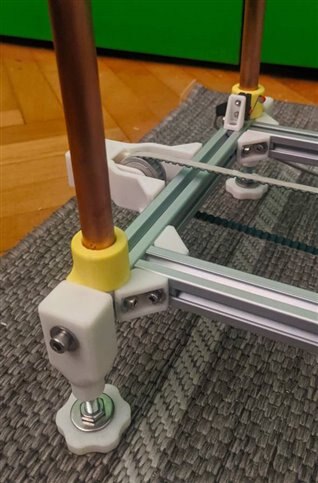
With all of that done, the only thing I needed to do was solder on some cables to the LED strip and try it out for a run. While these pipes are thin and long, after screwing together the whole construction, it got much more sturdy than I expected. It has some give to it, because the pipes are so long and thin and because of the way I mounted them, but nothing drastic, it really turned out great. Here are 2 more pictures of the final assembly on the lower and upper part of the construction.
6. Finished Build
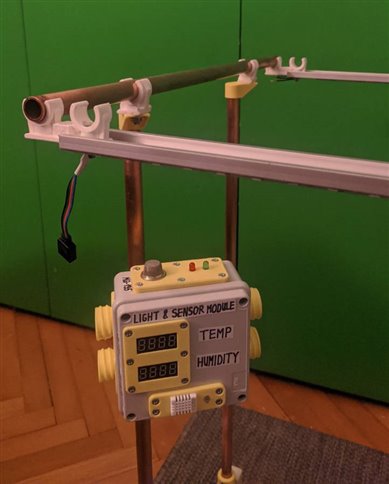
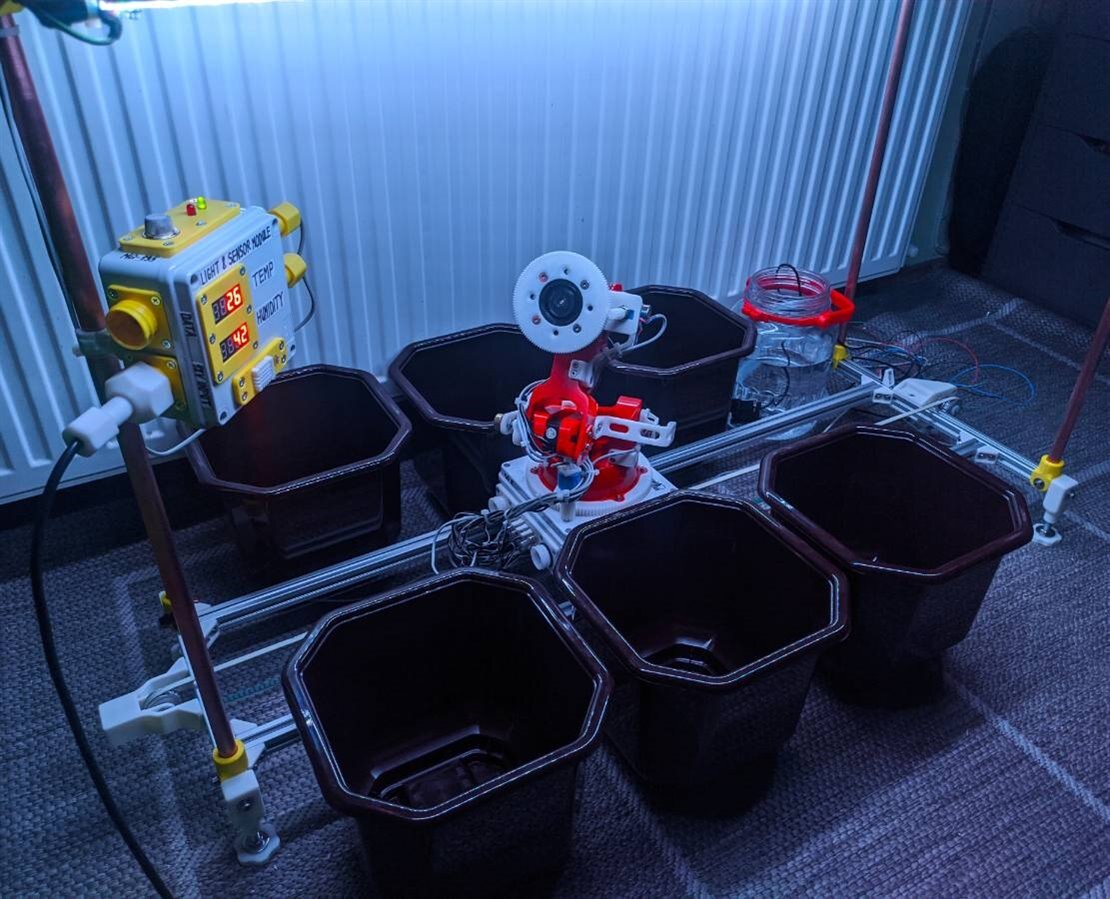
Now it's time to turn on the lights and see how this looks in the full setup with plant spaces and water container around it. While not exactly as I first drew it, there is a lot of resemblance and I'm extremely happy with how it looks right now!


As you can see from the pictures, our astronaut is snuggled now between 2 rows of where the plants can go. His arms (arm) are just long enough to reach any part of those plants with no problems at all. I think I will keep this height as it seems to work really good with these pots. You can also see the Sensor & Light module mounted up on one of the copper tubes. Let's turn on that module now and take a look at how it all looks with the lights turned on.

This is not the maximum brightness, rather about 2/3 of the way there, so I think it's safe to say that the double strip method on each of the aluminum profiles was a good option because we can really get a lot of lights onto the plants. Using the aluminum as the backing for the LED-s proved great as well since everything is cold to the touch. The light structure is sturdy enough that I'm carrying around the whole contraption just by grabbing the upper rails and moving it around. I'm extremely happy that I'm actually seeing this after so much thought and work went into this!
7. What's next?
With this complete, I can finally call the mechanical side completed. All that's left is software and a few finishing touches and mounts for various things. There is only one day left in this competition, so the next and final build blog will be posted tomorrow as soon as I'm done writing it. In that blog, I will cover the Raspberry-Arduino communication which I will need for the modules, using the Raspberry HQ Camera and so on. My goal is to make capable interface from which I can control a robot by giving it commands and from where I can read all of the sensor data, but more on all of that tomorrow! When it's posted, that blog will be linked at the bottom of this blog!
8. Fun news from the ISS
In this segment of fun news from the ISS, no actual news again unfortunately, but, going through NASA's website, I managed to find a lot of high resolution photos of the Advanced Plant Habitat-02. You can check out all of the photos as well as have a short read about this experiment here: https://www.nasa.gov/mission_pages/station/research/experiments/explorer/Investigation.html#id=7793 . The photo that stood up to me the most from those on the site was of course this one.
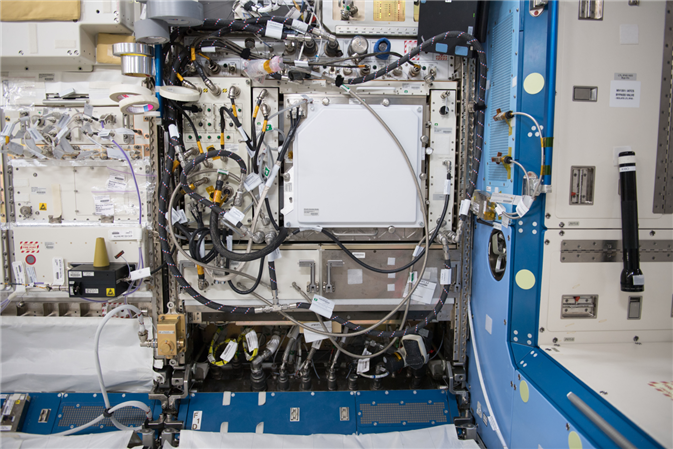
You can download a really high res version of this photo from the website linked above. I went and looked around a bit on this photo, and there are a few things I've noticed that seem cool. First is of course a giant roll of duct tape at the top of the picture. Second is the wiring, the sheer number of wires but not just that, also all of the connectors and how beefy they are. I can just imagine how one of those modules opened up looks like.
9. Summary
Tenth blog finally! While I started really late with this project, I was afraid of how far I would be able to come in such a low time period considering I have other obligations at university and how much work this required. While I am thrilled that I've come so far and that I was able to post the tenth blog, there is still work to do. The only big thing left is the software. Once I sort out and test out the communication properly, there shouldn't be much or any issues on that side. All of the relevant links for this competition, link to the next and previous blog as well as my GitHub where I'm uploading all of the models can be found underneath. Thanks for reading the blog, hope you liked it and found it interesting!
Milos
Relevant links for the competition:
Link to my GitHub where you can find all of the files used for this project (code, 3D models,...):
Link to my Project Collection:
| Previous Blog | Next Blog |
|---|---|
| Project R.A.G. - Blog #9 - Water & Rail Module | The Robot Assisted Garden Project - Final blog |
Top Comments