


Again, I want to thank the element14 Design Challenges group for selecting me to be a sponsored contestant in the "Experimenting with Inductors" competition. I also want to thank KEMET for sponsoring this competition.
Background
How a DC-DC boost converter works
A DC-DC boost converter operates based on the principles of the Inductor that provides the 'boost' for the circuit. Here is a simplified circuit of a boost converter:

In the circuit above, the boost chip contains a MOSFET, which switches at high speed, first turning on the MOSFET and causing current to flow from the Vin terminal through the Inductor (L1) to ground. This current flow causes a magnetic field to build around the inductor's core. When the MOSFET is turned off, the magnetic field collapses and and a large voltage peak is generated and passed through the diode and into the output capacitor (Vout). In addition, there is a feedback circuit (voltage divider from Vout) and control circuit that is used by the boost chip to regulate the output voltage, if the voltage is too high, the switching speed is decrease, or it the voltage is too low, the switching speed is increased. (Note: Normally the voltage levels occurring from the field collapse of the Inductor would be higher, but in this chip there is some form of voltage limiting causing the mostly flat portion of the inductor output voltage which is used to charge the output capacitor.
Here is a fragment of the MOSFET switching action, with a light load on the regulator (20mA - 10uH, 5Volt setting):
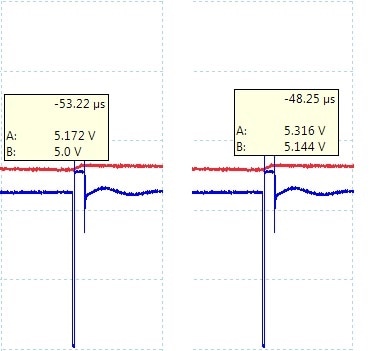
Prior to the MOSFET turning off (Blue trace), the output of the regulator output is 5.0 Volts (Red trace). As the MOSFET turns off (Blue trace going low - 0.0V), the regulator output goes up to 5.144 Volts (Red Trace). At the point the voltage ripple is ~140mV.
As the load is increased, the regulator adds a second pulse to the sequence, adding more energy to support the load:
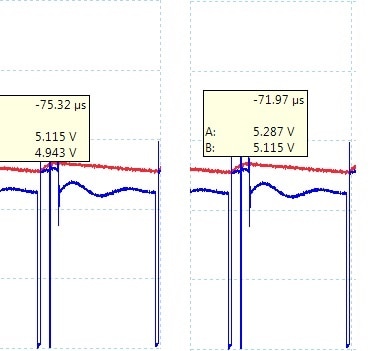
Prior to the MOSFET turning off (Blue Trace - 2 boost pulses) the output of the regulator is at 4.943 Volts (Red trace). After the two burst pulses, the regulator output goes up to 5.115 Volts. The ripple is now ~180mV.
As the load increases, the switching sequence gets more complex, with multiple bursts containing a varying number of boost pulses:

Here the ripple frequency and amplitude varies. Pushing further (up to 600mA) the boost pulse become more regular:

Here the boost pulses are occurring every 1.152us (~869.KHz). The amplitude of the ripple is greatly reduced (>20mV).

As the load increases further (1.75A), the regulator is not able to hold the output to 5.0 Volts. Here the output voltage has dropped to ~4.5 Volts. The PAM2401 regulator has protection circuits to limit temperature, current and over voltage, any combination of these controls could be limiting the output voltage.
Note: The PAM2401 regulator is configured slightly different from this simplified model in that it has a 'True Output Disconnect' (an extra MOSFET to disconnect the output terminal when the device is disabled). Other boost devices will allow the output voltage to track the input voltage (current path through the inductor and diode to the output). I had initially chosen this regulator to prevent battery drain in WalkyII Walky the Biped Robot - Power pack when the device was turned off.
Experiment Notes
Not everything works, every time, and this experiment was one of those times where a lot changes from the initial concept. I have broken the following section into two parts representing my initial concepts (automatic) along with the reality based (manual) measurement setups.
Automatic Measurement Setup
The initial concept involved using circuitry on the baseboard to measure the voltage and currents at both the input and output of the regulator board and log the data to a file. The baseboard would also control the DC load, via a DC voltage (DAC output). In addition to these measurement, there was a plan to manual collect voltage ripple readings and some temperature values.
Control panel - Attempting to calibrate voltage and current readings
In order to communicate to the baseboard I developed a Visual Basic, Windows Forms Application. This application (Control Panel) could communicate to the baseboard through a USB to UART device (FT230XS).

From this Control panel I could setup up a test run, setting the Initial and final Load current values as well as the step size and step delay values.

Here is a sample test run, stepping from 0.1A to 2.0A, with 100mA steps, held for 5 seconds. The control panel software would output a series of messages to the baseboard to Write to the DAC (after computing the correct command) and then requesting both input and output voltage/current readings. Using the this software, with a DC load used in place of the input and output sides of the regulator board, I was able to measure the voltage and currents.

This data is taken from the input side of the baseboard. This where I began to wonder of the path, doubting the ability of this form of testing. Since I was going to be collecting data from multiple instruments, I chose to manually collect all of the data. I programmed the DAC on the baseboard to generate the control voltage for the DC load (Dark blue trace), the DC Load current (panel meter) is the red trace. I also measured the current manually with a DMV inserted in line with the DC Load (purple trace), and also the Power supply reported current (green trace). Then I collected the reported current from the baseboard circuitry (cyan trace). This began to show the inaccuracies of the multiple measurement devices (> 6% spread in the measurements). Which one is correct? How do I correlate all of the readings? Not having any really accurate or even a recently calibrated device among the multiple instruments, I decided to 'believe' my DVM.
Baseboard errors
Early on in the process of bringing up and testing the baseboard circuitry, it became apparent that I had made an error on the output measurement side. I had basically copied the input side circuitry to the output side. The problem is that the input side has current flowing into the board and the output side would have current flowing out of the board (to the DC load). I need to swap the two measurement points across the series current sensing resistor. Having already received the PCBs from the fab shop (and have loaded the boards) I needed to cut and jumper the two measurement points (quite difficult with the headers installed, but not impossible).
Baseboard problems - Poor current, noisy voltage and current readings
So, with all of the code developed to 'correct' the readings, I moved from the test setup of using the DC Load to simulate the regulator board, to running everything live (switching regulator installed, DC load on the output). The switching noise on all the measurements (voltage and current of the input and output sides) were very bad. Having already done some heavy filtering on the microprocessor, I knew that this was not going to work. I needed a new plan. I decided that I would go ahead with a fully manual test of the regulator.
Manual Measurement Setup
Manually testing the DC-DC regulators was going to be a lot of work, but at least I knew that the work would yield some meaningful data. I had decided on 6 inductors to test, with each test being approximately 300 test steps, for around 1800 test steps. The data collection took me a couple of days, until I figured out that I had a couple of hardware errors and decided I needed to repeat another 500+ measurements (one regulator had a solder bridge and another had two resistors swapped). So a total of over 2300 test steps. Briefly, here was the plan:
- Each regulator/Inductor would be tested at 2.5V, 3.0V, 4.0V and 5.0V output levels (jumper selection)
- Each regulator/Inductor board would be tested with an input of 1.0V up to the output voltage - 0.5V (i.e. 2.5V setting would be tested at an input of 1.0V, 1.5V and 2.0V)
- Each regulator/Inductor board, at each output setting level, would be tested at an output current level starting at 50mA, at steps of 50mA, up to the point where the output voltage was ~1.0V low, or until the regulator chip shutdown.
The following regulators would be tested:
| Part Number | Inductance (uH) at 100KHz, 1mA | Inductance tolerance | DC resistance (mOhm) Typical | DC resistance (mOhm) Maximum | Irms (Note 1) | Isat (Note 2) | Isat (Note 3) | Self-Resonance Freq. (MHz) |
|---|---|---|---|---|---|---|---|---|
| MPX1D0520L1R0 (in Kit) | 1.0 | +/-20% | 16.40 | 18.90 | 7.6 | 7.0 | 9.0 | 62.0 |
| MPX1D0520L2R2 | 2.2 | +/-20% | 35.10 | 40.40 | 5.2 | 4.5 | 6.5 | 39.0 |
| MPX1D0520L3R3 | 3.3 | +/-20% | 55.80 | 64.20 | 4.1 | 3.5 | 5.5 | 34.0 |
| MPX1D0520L4R7 (in Kit) | 4.7 | +/-20% | 84.00 | 96.60 | 3.4 | 3.5 | 4.5 | 26.0 |
| MPX1D0520L100 (in Kit) | 100 | +/-20% | 193.70 | 222.80 | 2.2 | 2.5 | 3.5 | 20.0 |
| MPX1D0530L4R7 (in Kit) | 4.7 | +/-20% | 6.0 | 6.9 | 13.8 | 9.0 | 13.0 | 91.0 |
Note 1 - T = 40 K rise at rated current
Note 2 - Inductance drop 20% at rated current
Note 3 - Inductance drop 30% at rated current
Note: It would have been interesting to test other combinations, like differing output capacitors, to further characterize the circuits, but I quickly found myself running out of time. Maybe this is something to get back to latter.
New Power Supply
I recently purchased a TACKLIFE - MDC02 Power supply, which I will be using as the regulator power source. Here is my updated (also corrected) list of equipment that I will be using in this test:
- Kikusui Electronics - Electronic Load - PLZ 72W - This will be used to load the DC-DC step-up regulator output. This instrument will be knob adjusted to set the load current for the test step.
- TACKLIFE - Power supply - MDC02 - 0-30V / 0-10A - This will be my input power source for the regulator. This supply has a fine/course adjust know that digitally sets the output voltage/current. Using the fine setting, I will be able to set the voltage with each click being 10 mV.
- PicoScope - Oscilloscope - 5444D MSO - 60MHz / 1 GS/s, 4 Channel (+ 16 digital channels) oscilloscope - This will be used to look at the output waveform of the DC-DC step-up regulator output (ripple and overall voltage output)
- METEX - DMM - M-3850 - Digital multimeter - This meter will be used as an Ammeter, inline with the load to more accurately set the load current.
Scope Probe Grounding
To assist in capturing clean voltage waveforms/readings on the PicoScope, I build a couple of short-coupled ground lead springs to affix to the scope probes. Following the lead of Jan Cumps on a recent status update https://www.element14.com/community/people/jancumps/status/273467#comment-249124 , I created some ground springs for my PicoScope scope probes (seen below). I used 0.032" Brass Rod to create the springs. I wound this springs around a 0.175" diameter rod, which is slightly than the 0.19" diameter probe tips. This left me with a very nice fit on the scope probe tips.


Note: to facilitate probing, I added a probe tip hole and ground point hole in close proximity to the output signal on the regulator boards. I also made a second spring type that allowed me to hand probe the Inductor voltage, as I did not plan ahead to add the necessary holes for this reading.
Precautions While Obtaining Data
While doing the data collection, with multiple jumper changes and such, I developed a habit of switching off the power supply output (I really like this feature) prior to making large voltage changes, or jumpers changes. This is a good practice when you do not what to exceed the input voltage limits of the device. There were multiple times where I was very thankful that I took this precaution, as I did twist the knob on the power supply thinking it was in fine when it was actually in course, setting the voltage to a level well above the maximum input level, with creating a failure.
Building Excel Spreadsheet for Data Collection (computing power/efficiency)
To collect all of the data points I used Excel. My spreadsheets were a combination of manual entries, fixed entries and calculated variables. Here is a sample clip of one of the spreadsheets (color added for descriptions below):

In this sample, the yellow fields are fixed entries. The blue fields were entries from the test equipment and the red fields were calculated from the fixed/manual entries). Each step was collected by setting the power supply to the 'Input Voltage' and the DC load to the 'Output Current' (reading the current from the DMM). Then I recorded the 'Input Current' (from the power supply), 'Output Voltage' and 'Ripple PkPk' from measurement fields from the PicoScope. This process was repeated up to the point where the output voltage was ~1.0V low, or until the regulator chip shutdown. (Note in this sample, the regulator shut down before I was able to set the 'Output Current' to 0.35 A)
Late into the process of collecting all of the data, I though that a better design of the spreadsheet would have been to group all of the manually entered data next to each other such that a single tab press would advance to the next field. There were a few times in the data collection where I had to fix some data entry values as I press the wrong number of tabs. A good approach might have been to have the two fixed values (Input Voltage and Output Current) in the first two columns, with the manual entries in the next three columns and then all of the calculated fields in the remaining columns.
Working from the Specification Sheet
From the PAM2401 specification, the following points are made in regard to Inductor selection:
- "Inductor current saturation rating should be larger than the possible peak inductor current to ensure proper operation" - In these tests, all of the inductors have higher higher current saturation ratings than the possible peak inductor currents.
- "Inductor should have low DCR (DC resistance)" - These Inductors all have great DCR values.
- "For most applications, the value of the Inductor should be in the range of 1μH to 4.7μH" - I want to extend the Inductor value range all the way to 10uH to see what effects occur as Inductance rises.
- "The Inductor value is chosen based on the desired ripple current. Larger value Inductors result in lower ripple currents and smaller value Inductors result in higher ripple currents" - This will be one of the focuses of the captured data.
- "A 1.5μH or 2.2μH inductor will be the best choice for most PAM2401 applications" - It will be interesting to see if this holds true.
Effects of Inductance Value on the Measured Results
To examine the effects of inductance value on the circuit design, I decided to limit the data to a few input voltages that would be somewhat representative of a single Li-Ion cell going from charged to discharged while producing an output of 5.0 Volts. I used 5 inductor values (1.0uH, 2.2uH, 3.3uH, 4.7uH and 10.0uH) for the data points for these comparisons.






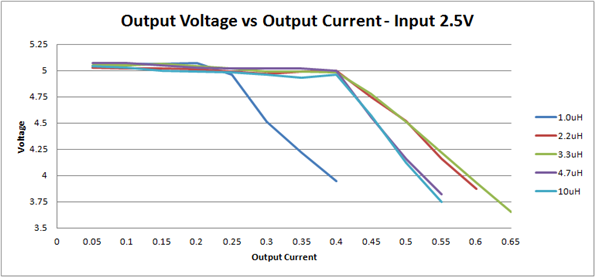


In almost all of the cases of Output Voltage vs Output Current (regulation) the 1.0uH Inductor came up short, with voltage rolling off much sooner. All of the other inductors seemed to do much better, but with the 2.2uH and 3.3uH doing slightly better (although the 10.0uH rolled off more sharply than the other at 4.0 Volts)
When it came to Efficiency, the 10.0 uH seemed to under perform the rest of the inductors. The 1.0uH inductor did well at the higher voltages, but struggled a little at 2.5V (but still achieved the single highest efficiency point at 2.5V)
In the Ripple charts the 1.0uH Inductor seemed to produce the least amount of ripple. This could have to do with the controller needed to shift into the fixed pulse pattern sooner due to a smaller magnetic field (and hence lower collapse voltage). The big loser in the rippple voltage was the 10.0uH inductor, likely due to the opposite reason as the 1.0uH Inductor (the controller was able to shift into the fixed pulse pattern much later through the output current range, due to a larger magnetic field and hence higher collapse voltage).
Overall, it looks like the 2.2uH and 3.3uH inductors did the best overall. This is something to think about as I have typically used a 4.7uH Inductor. Strange, but the ripple to Inductance value statement made in the specification just did not seem to ring true in the results seen here, maybe at different output voltage settings, or with lower value output capacitors this might have been closer to the specification.
Effects of DC Resistance on Measured Results
To examine the effects of DC Resistance on the circuit design, I decided to use two different Inductors (MPX1D0520L4R7 vs MPX1D0530L4R7) with the same Inductance (4.7uH) but different DC Resistance (typical 84 mOhms vs 6.0 mOhms), across the full range of input voltages (1.0 to 4.5V) and a single output voltage (5.0V).
limit the data to a few input voltages that would be somewhat representative of a single Li-Ion cell going from charged to discharged while producing an output of 5.0 Volts. I used 5 inductor values (1.0uH, 2.2uH, 3.3uH, 4.7uH and 10.0uH) for the data points for these comparisons.



It appears that in almost every case the lower DC Resistance resulted in an improvement in Output Voltage vs Output Current and Efficiency vs Output Current, but a slightly higher Ripple output vs Output Current. Generally speaking the added Output Voltage and Efficiency would outweigh the slight increase in Ripple voltage.
Conclusions
I feel that I learned a lot about component selection in a boost DC-DC voltage converter. On of the things that I learned, was that I am not as happy with this converter than I was before looking at it this closely. In future projects I will look a little harder for a more suitable converter (less ripple and better voltage regulation).
For this particular part, I might want to move away from 4.7uH and over to 2.2/3.3uH Inductors (better overall performance). This might be effected by the load I am servicing in a particular application.
I found it interesting (and somewhat disturbing) that the recommendations in the manufacture's specifications were not always true, nor were all of their claims (efficiency and regulation).
I need to work harder on my measurement circuitry. In the presence of high levels of noise, I need more stable and robust measurement circuits/designs.
I need to look into getting some better test equipment. In particular a more accurate ammeter (more digits, better specifications, lower/more ranges).
I was very happy with the quality and performance of the supplied Inductors. These KEMET parts performed very well.
I am still very interested in achieving my stretch goal of winding some torrid-base inductors and seeing how they perform in this circuit.
Thanks again to element14 and Kemet for allowing me to be a sponsored contestant in this challenge!
Top Comments