


Introduction
This is the last part of the sub-project Art-a-tronic created in cooperation with the artist Lorenzo P. Merlo. In the previous posts we saw the design, 3D printing and testing of the top structure, the more complex part of the assemble. The referred posts are listed below:
PiIoT - The perfect reading place #7 [tech]: Art-a-tronic, mechanic design
PiIoT - The perfect reading place #8 [tech]: Art-a-tronic, setting the moving parts
PiIoT - The perfect reading place #9 [tech]: Art-a-tronic, mechanic test
Now we see the base design creation and simulation composing the final structure.
Designing the motors
The easiest way to design the base and position the GearBest stepper motors has been creating them with CAD and inserting in the Art-a-tronic model design.
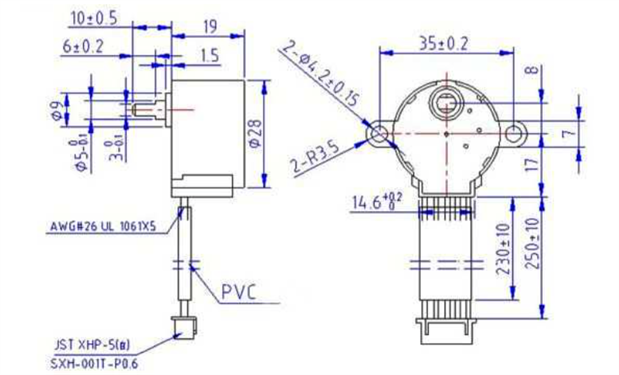
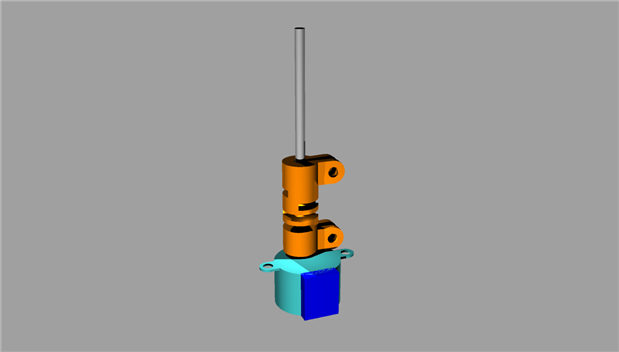
Based on the motor sizes from the data-sheet a 3D CAD model has been designed as shown in the image below
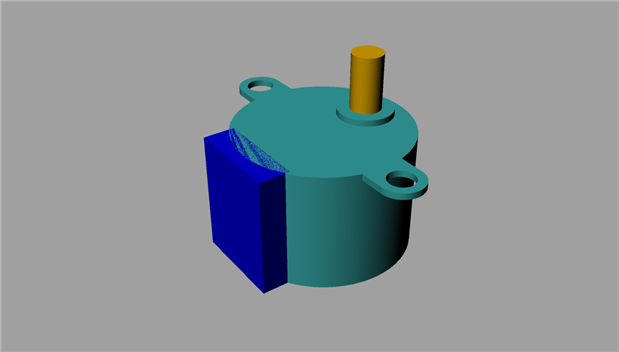
The design has been simplified keeping the correct dimensions as in the real device. The following images show the motor with the 3d printed flexible joint when it is assembled.
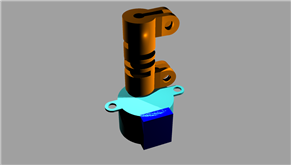
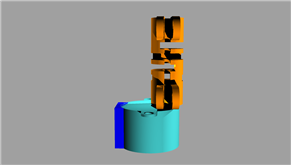
According with the other parts sizes and heights the M3 threaded bar generating the vertical movement of the moving components will be 7cm.
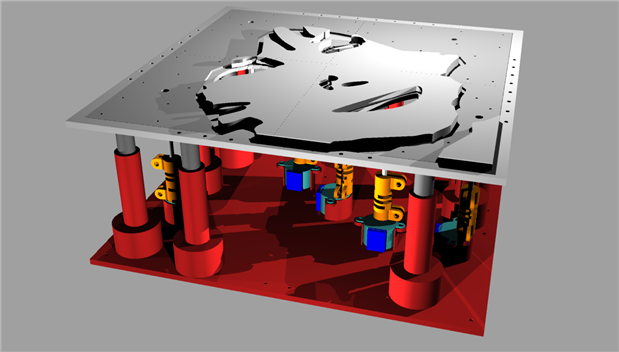
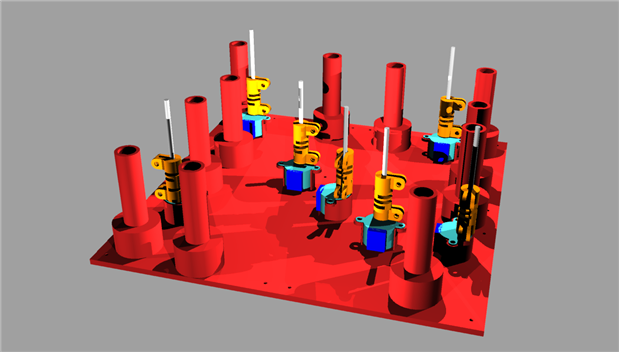
At this point after creating the base parallel to the top the motors has been positioned then the supports bas been created to sustain the top. The following image gallery shows in detail the base and the other layers in the assembly simulation.
| {gallery} Art-a-tronic simulated layers |
|---|
The all-layers structure as they will be when assembled. |
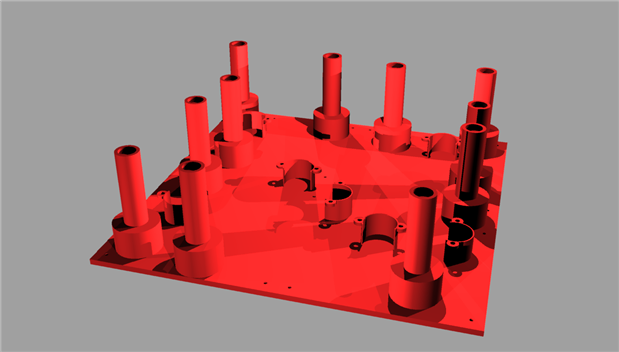
Top support removed. Note the moving supports (upper gray) that will be on top of the support and the fixed supports parts (lower gray) connected to the base columns |
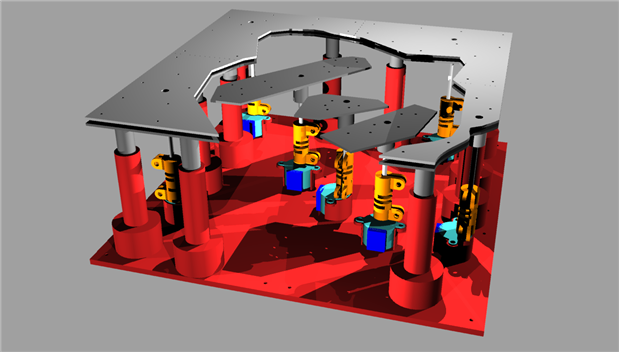
The fixed supports. Note that the base links are also the moving top parts supports for the cylindrical guides |
The base with the fully assembled motors in place |
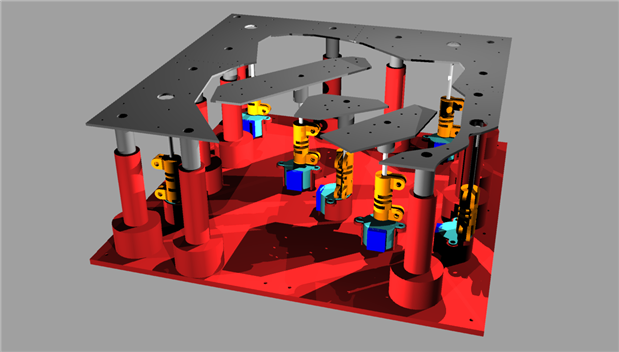
The base support |
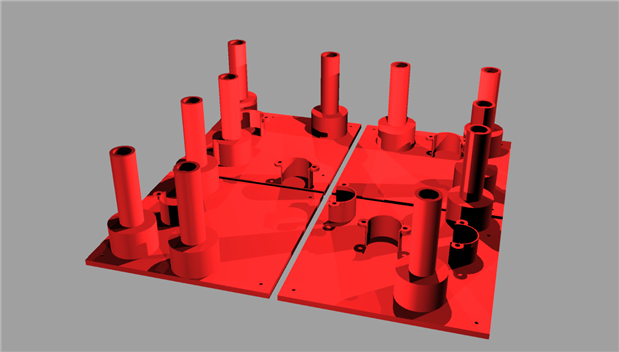
The base supports. Note that the full base is divided in four sectors as well as the top building. |
Top Comments
-

fvan
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

fvan
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children