


Today I completed the wiring of the TrainingSphere. The final result is shown in picture
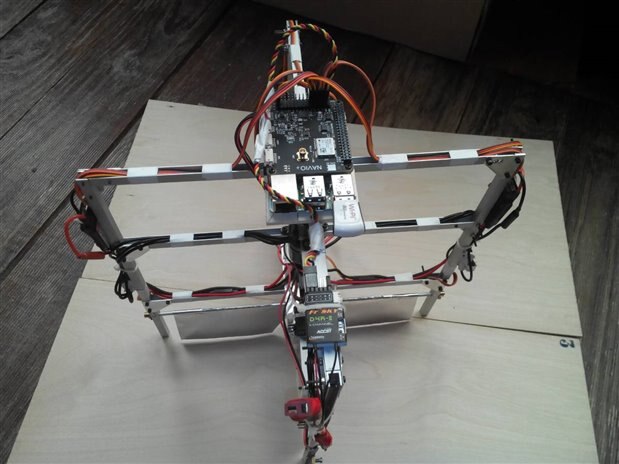
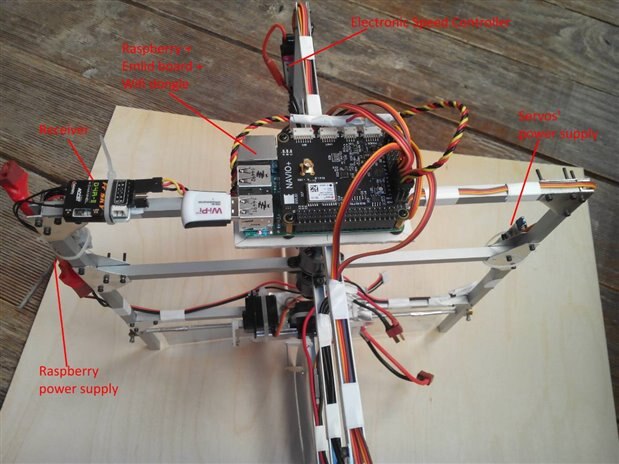
As you can see, I finally made the decision the use the Emlib Navio+ board. This is a really challenging project I want to continue to develop even after the end of this design challenge, so I invested some money in a piece of hardware that is reliable and tested enough to make me develop applications that run in the Raspberry environment and interact with the APM platform. Possibilities are really endless compared with "closed" solutions like pixhawk and ardupilot
Anyway, next steps will include
1. Parameters settings
2. Compass calibration
3. Accelerometer calibration
4. Radio calibration
and finally... first flight (hoepfully)
After that, the plan is the add the optical flow sensor for making the sphere able to loiter in an indoor enviroment
Top Comments
-

screamingtiger
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

balearicdynamics
in reply to screamingtiger
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

screamingtiger
in reply to balearicdynamics
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

screamingtiger
in reply to screamingtiger
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

balearicdynamics
in reply to screamingtiger
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

amgalbu
in reply to screamingtiger
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

amgalbu
in reply to screamingtiger
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children