


If you like my project vote for "A Smarter Tricopter - Yuri Tikhonov" 
Happy New Year and Merry Cristmas!

What was done over the past few days:
- hidden power wiring was set (real puzzle...)
- ESC's were set, connected and tuned.
- Rx & LiPo (temporarily on plastic clamps) were set.
- software for PSoC 4 was modified, now it "works fine on the machine".
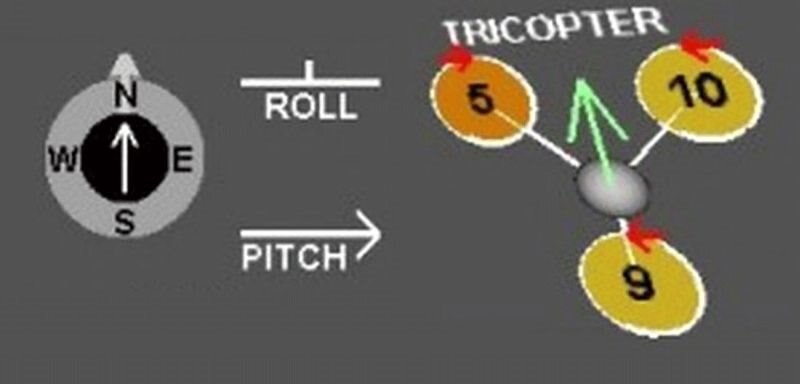
Slight difficulty with ESC was the next: after soldering it turned out that one of the motors rotated in the wrong direction, good still, that ESCs of "HobbyKing BlueSeries" support software change for direction of rotation. Now motors rotate like this:
Mounted ESC:

After all wiring installation I got a nasty surprise: PSoC burned out! Probably I fused something and the smoke poured from the board! However, I was not upset: as you know from post #2, I ordered 4pcs PSoC 4 in LQFP package, so the board was brought back to life.

During setup of the firmware, the servo suddenly stopped working! Judging by the sound the engine was working, but not the drive shaft. The problem was quite exotic: I applied to the input of the servo a "specific" signal, which cranked the gear! After dismantling the drive and installing the gear in place, the drive started to work again 

And then flashed an evil thought: what about running the tricopter at home!! And why not? Basically everything works, the control system behaves exactly as I wanted, the unit is assembled, the motors are spinning. I put the propellers in place, started engines and ... I stopped. Oh, no! I can not suddenly destroy the machine, in which I invested so much time, effort and soul!
So, it was decided to postpone the launch until after the holidays, during this time I want to fully test and calibrate all unit systems . Also, to run the machine at home is very dangerous: dimensions of the device 100x90cm, sharp propellers 25cm each rotate at >12000rpm, this is not a joke. Safety first!
The next post will be likely the final, I can not believe, how quickly time flies Only yesterday the unit was not yet even in my thoughts and here today it is already waiting in the wings.
See you soon, comrades!
| # | link | description |
|---|---|---|
| 1 | PSoC 4 Tricopter Part #1 | Introduction |
| 2 | PSoC 4 Tricopter Part #2 | Purchase of components from Farnell and HobbyKing |
| 3 | PSoC 4 Tricopter Part #3 | PSoC firmware: upTime & Rx |
| 4 | PSoC 4 Tricopter Part #4 | PSoC firmware: UART & MultiWii GUI |
| 5 | PSoC 4 Tricopter Part #5 | PSoC firmware: EEPROM emulation |
| 6 | PSoC 4 Tricopter Part #6 | PSoC firmware: Servo & ESC control |
| 7 | PSoC 4 Tricopter Part #7 | PSoC firmware: IMU, LED's & PID |
| 8 | PSoC 4 Tricopter Part #8 | Hardware: PCB |
| 9 | PSoC 4 Tricopter Part #9 | Hardware: tricopter's frame |
| 10 | PSoC 4 Tricopter Part #10 | Hardware: YAW mechanics & motors |
| 11 | PSoC 4 Tricopter Part #11 | Hardware: ESC's, wires & misc |
| 12 | PSoC 4 Tricopter Part #12 | Final: The first fly |
If you like my project vote for "A Smarter Tricopter - Yuri Tikhonov"
Top Comments