

Table of contents

Abstract
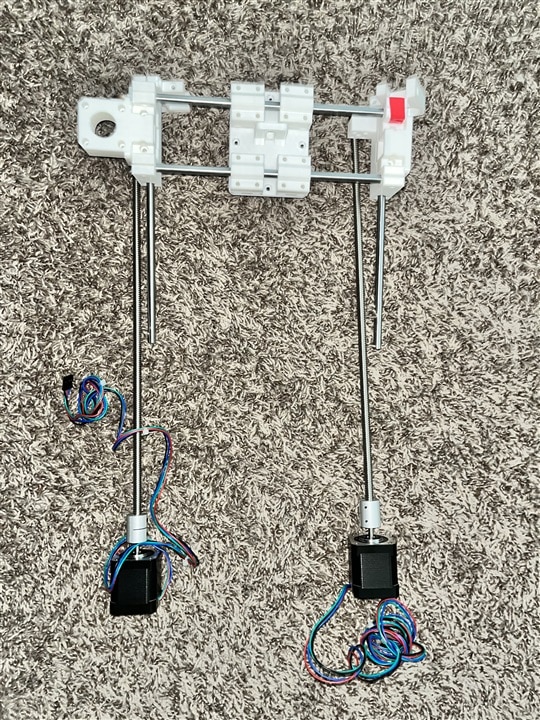
Building the frame for the project
Project
Project Genesis: Modifying the Green Mamba v2.0
Every great project starts with a solid foundation, and my DIY Pick and Place Machine is no exception. I began by repurposing the Green Mamba v2.0 DIY 3D Printer design as the structural blueprint for my machine. This versatile base provides an excellent starting point for creating a custom pick and place system.
Structural Components: 3D Printed Aluminum Extrusion Mounts
The frame came together through careful modification of the original Green Mamba design, with a focus on 3D printing mounts for 2020 aluminum extrusion. These precision-printed components allow for a robust and customizable frame that can be precisely adjusted to meet the specific requirements of a pick and place machine.
Axis Configuration
The machine's frame is built around three primary axes:
- Y-axis:
- 2 Guide Rails
- TX2 Pulley
- 1 Nema17 Motor
- X-axis:
- 2 Guide Rails
- TX2 Pulley
- 1 Nema17 Motor
- Z-axis:
- 2 Guide Rails
- 2 Lead Screws
- 2 Nema17 Motors

Challenges and Modifications
No DIY project comes without its challenges, and this build is no exception. I encountered a critical issue with the lead screws and T-nuts that required some creative problem-solving. The 400mm lead screw worked perfectly with the T-nuts, but the 200mm lead screw I initially purchased didn't align as expected.
Adaptation Strategy
- Identified mismatched lead screw dimensions
- Explored alternative mounting solutions
- Developed custom modifications to ensure precise axis movement
Next Steps in the Build
Electronics Integration
The next phase of the project involves:
- Wiring up the electronic components
- Configuring motor connections
- Calibrating the axis movements
Motor Programming
A critical step in bringing the machine to life is programming the motors to understand and navigate the X-Y-Z planes. This involves:
- Developing precise movement algorithms
- Calibrating step sizes and movement accuracies
- Ensuring repeatable and consistent positioning
Image Recognition Development
Looking ahead, the ultimate goal is to implement image recognition capabilities:
- Designing algorithms for component identification
- Creating a machine vision system
- Developing pick and place coordination code