


First thing I do what I get the kit is stop working, un-box the kit, and take some pictures while exploring.

Ubilinux
Two Edison's, great that takes care of one issue, what OS to use. I started by mounting an Edison on the Arduino board and installing Ubilinux on it. Also I do not want to install from Windows, so I am installing form a laptop running Ubuntu 14.04. I found that Spartfun has some great resources for this, so why re-invent the wheel. I started by plugging in both USB ports to my laptop. and on the one interface that has the ttyUSBX device, I ran screen to watch the console. The command for screen for me was "screen /dev/ttyUSB1 115200". I followed the Linux instructions from this article by Sparkfun with one addition, I had to install a package "dfu-util". If you look at the screen shot, then you can see where they install it, but do not mention it right before they run the "./flashall.sh" from the toFlash folder.
Once installed and after the reboots, console helps watch what is going on and when the system is ready, I finished by setting up the WiFi, disabling USB0 network interface. After that I run the usual apt-get update/upgrade, to make sure all is up to date. As this is running I started by second system updates to Yacto. I proceeded to start testing with Python and Node (via NVM), but I have not got far and I will cover this more later.
Edison two: Yacto
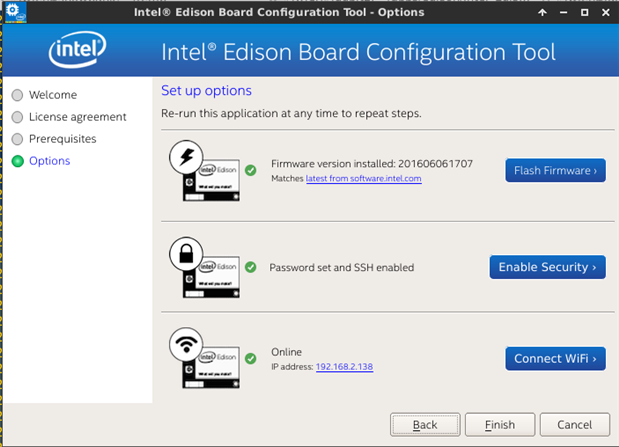
I mount the second Edison on the mini board and once again hook up two USB cables. Again I setup one as console and start screen, "sudo screen /dev/ttyUSB0 115200". I downloaded the Intel Setup Tool for Linux and unpack it in a folder. Nice to have the console again to see what is happening from the Setup Tool. Here are some screen shots of the setup process.
Very easy, to use, next and do all the steps listed. This will update, setup WiFi, root password (8 characters minimum)
Once again the Console is nice to watch what is happening. Really, I like information.
Once done, be patient, it has to reboot two times and watching the console helps. Take ten and explore your other system.
Only issues I had at this point is the USB interface on both systems is setup to be a 192.168.2.x/24 network, which is what I run at home. So now I have to disable or change both. On Ubilinux this is covered in the Sparkfun document by editing /etc/networking/interfaces. On Yacto I edited /etc/systemd/network/usb0.network file and changing the IP address. Also ifconfig is missing so rather than rebooting I disabled the usb0 interface for now with using ip command, "ip link dev usb0 down". That fixes it since I have ssh and WiFi.
What is Next?
My next write up, I will cover my experimenting with Python and node, testing and interfacing some of the sensors and items we got in the kit. I will let you know what I think of both systems and the problems and success I had with each.
Top Comments
-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

DAB
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children