


Xut the penguin is an entry into the Project14 Animatronics competition. Part 1 of this two part series describes how the mechanical aspects of Xut (rhymes with Root) were conceived and fabricated. In part 2 the final adjustments are made and the electronics completed.

Origin Story
I am not exactly sure what made me decide to make a penguin. It just occurred to me on my daily walk after deciding against a dinosaur. Xut is a male penguin and again I am not sure why, but I know he is. I imagined him rocking back in forth in a waddling fashion, but not actually able to waddle. He would flap his wings and move his beak. Here is the first sketch drawn freehand.
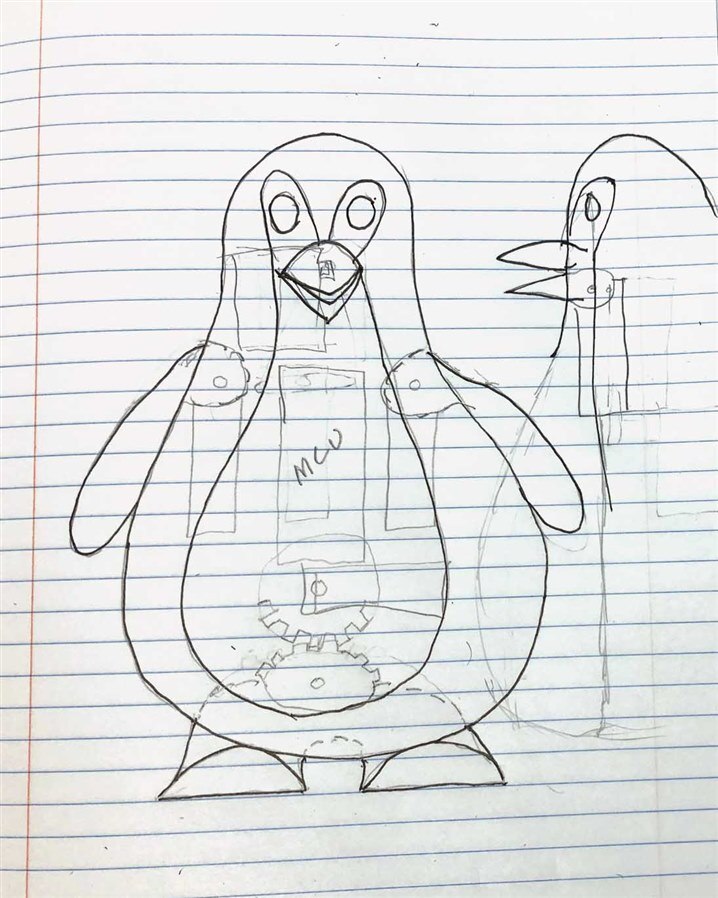
Another freehand sketch was drawn roughly to scale and dimensioned.

Fusion 360
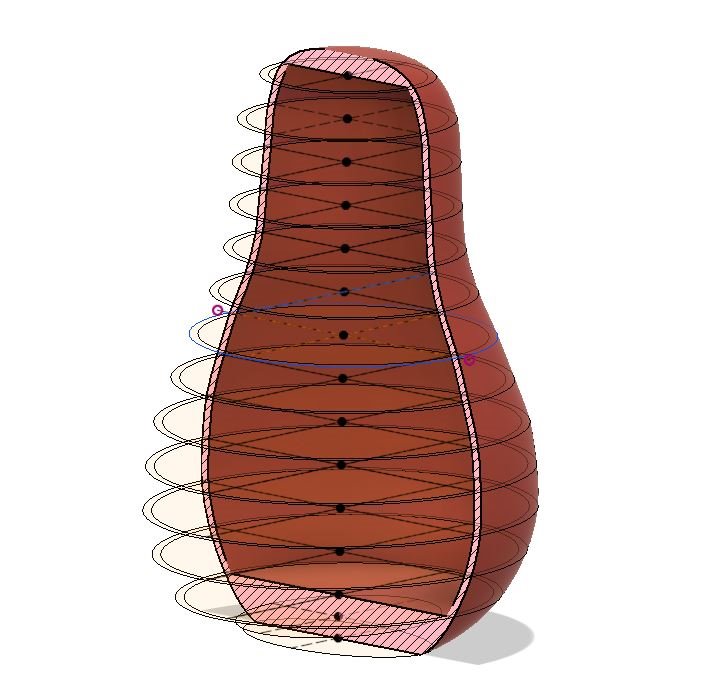
Looking good I thought and then moved into Fusion 360. Using the dimensions in my sketch and ellipses a skeleton framework was drawn. The dimensions were made somewhat parametric but the shape is complicated enough that this only worked so well. After a bit of tweaking it looked like this:

Fusion 360 has a very neat feature called Loft which allows one to create a smooth solid through multiple two dimensional shapes. The outer ring of ellipses was used to create a solid. Then the inner rings were used to cut away part of the solid to create a hollow shell. In the screenshot below a section of the body has been removed to show how it was constructed.
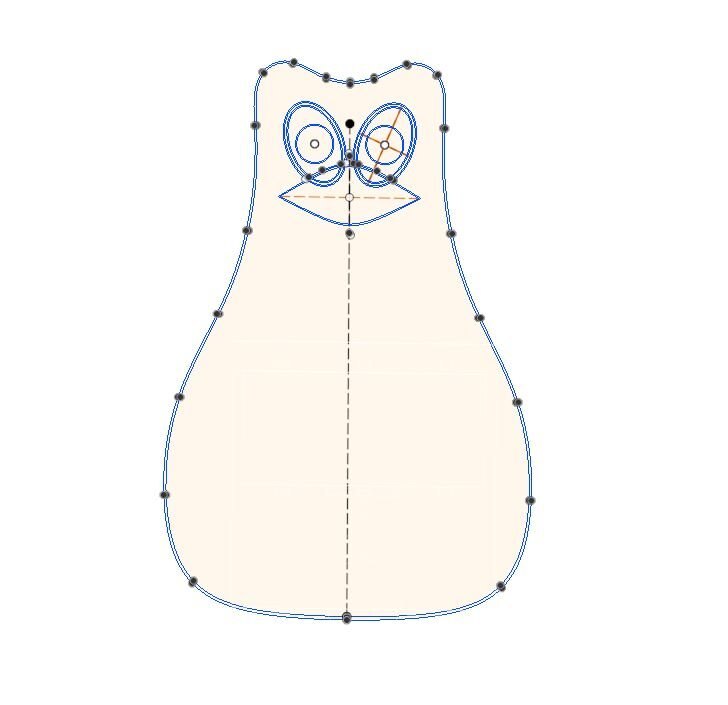
His face and tuxedo were drawn on a plane in the center of the body. I just played with it until it looked like a penguin and the edges of the tux were close to a vertical plane when viewed from the side. The double lines are necessary to prevent interference but still allow a snug fit when the tux and face are removed / extruded from the body in the model.
The motor mounts and wing mechanism required a bit of thinking and rework. The motor mount was first made integral to the body. A quick print was made to check things and it became apparent that due to limited space and the rafting it was not going to work. Plus it wasn't possible to get the desired motion from the wings. So the motor mount was printed separately from the body as shown below and gears used to flap the wings.

The wings are glued on after the motor mechanism and gears are installed. The orange gear is glued to the horn of the SG90 servos and drives the black wing gear which has a square extension which glues to the wings. This is the least attractive part of the build and I hope to find time to come back and modify the wings.
After adding some legs the sketch with his tuxedo and face were cut through the body and shading added. Now he is starting to look like a real penguin.
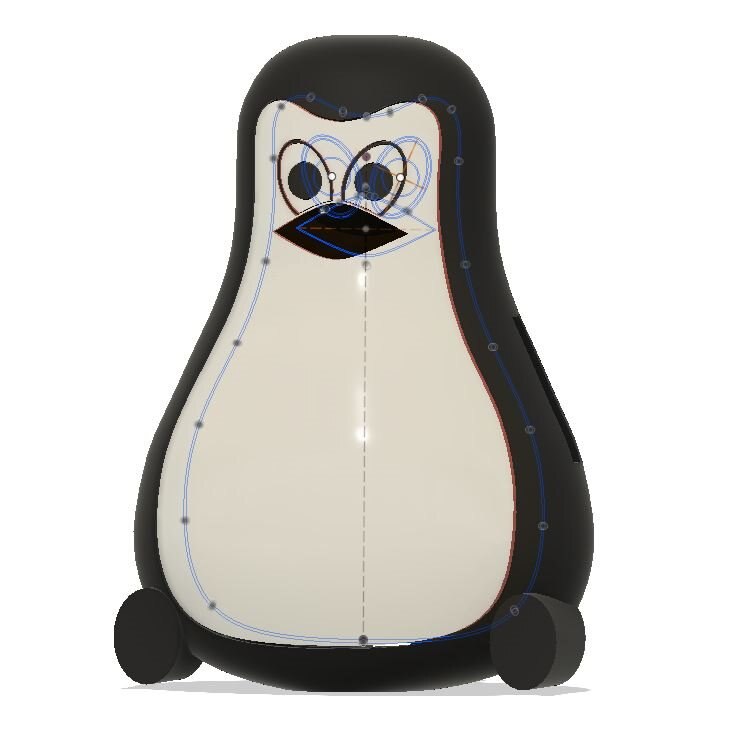
Next a beak, eyes, and feet were added. Here is the model in both frontal and side views.

You may notice that he has evolved into something that looks a bit like another famous penguin. See the tail? There is a hole underneath that goes all the way through for accessing the insides. Just like a real penguin.
3D Printing
Slicing was done with Cura 4.3.0. The time to print the main shell is around 12 hours using intermediate quality (0.2 mm layer thickness) on the Anycubic I3 Mega. The body is printed upright with black PLA and default temperature settings of 200 C for the nozzle and 60 C for the bed. As seen in the view from the slicer below there is quite a bit of support and travel threads internally that needs to be removed. The exterior looks nice when printed though and requires minimal clean up.

The other large part with a complicated shape is the tux and face. It is laid flat and printed with white PLA using standard print quality and temperature settings. What rafting there is was left for the most part as it doesn't hurt anything and maybe even adds some rigidity.

Assembly
Some cleanup is required of many of the parts before assembly but isn't too difficult. The eyes and motor mount are hot glued in place. The beak is a friction fit as is the white tux. Wings are glued on with super glue. Here he is completed with the model in the background.

I am amazed at how 3D CAD modelling has changed and improved the design process. Not to mention 3D printing for prototyping. Here is Xut with his insides exposed as they currently exist.

Animation
If paying attention you will have noticed that the waddling motion is missing. That is because I dropped the idea for the waddling fairly early due to time constraints and complexity. You might also notice that although there are slots for the third motor that moves the beak there is no third motor and the beak is fixed. Doh! That is because on the second iteration of the wing mechanism I realized there was not enough room to get proper motion and the servos needed to be moved inboard. As a result there wasn't room for the third motor. It may look like there is room in the neck but without some rework there is insufficient depth although I might still figure something out without reprinting the body. What I should have done was design the mechanisms and then fitted the body around it instead of the other way around.
For now there is an Adafruit Feather M0 Express driving the servos from outside the body but there should be room for that and some other features. Circuitry and code will be published upon completion. Here is a short video describing the mechanical aspects a bit more and showing the wings in action.
Comments and Next Steps
Overall I like the look. Animation of the wings is OK but some modification would help them look more natural. As noted above, a better approach would have been to get the mechanisms right and then mold a body around them rather than starting with the body first.
The Thanksgiving holiday approaches here which will take me out of action for the next week. This being a good stopping point I've documented where I am at and will pick up again in a week or so.
By the way, any idea why his name is Xut? Extra credit and a gold star if you can guess. Comments and suggestions are always welcome.
Links
Top Comments