


Congratulations to amgalbu for Patpat-o-matic (aka celebration of self-celebration)! You are the grand prize winner and you win a $200 shopping cart.
Congratulations to robogary for The Junk-Pile Strobe Tachometer.....and it really works!, javagoza for The Quantenkompassinator , and ntewinkel for Rube Goldberg Machine to Turn On a Light! You are the first place winners and a $100 shopping cart.
The Rube Goldberg Device competition challenged you to do any project that was overly engineered or a wacky automation device. Rube Goldberg Devices consist of any contraptions, inventions, devices or apparatuses that are deliberately over-engineered to perform a simple task in a complicated fashion. The grand prize winner was a Patpat-o-matic that monitors your element14 point total and uses that to give you a compliment in the form of a pat on the back. The first place winners were a Junk-Pile Strobe Tachometer that was inspired by the need to monitor, random no-name plate DC motors salvaged from printers, cars, toys, and experimenter kits; an over-engineered motorized compass known as the Quantenkompassinator; and finally a Rube Goldberg Device that turns on the light.
Special thanks to our community judges: DAB and genebren!
Without further ado here are your winners...
Grand Prize Winner:
Patpat-o-matic (aka celebration of self-celebration) by amgalbu
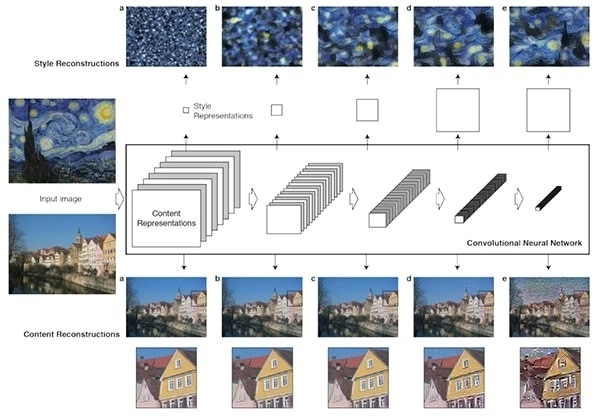
The Patpat-o-matic monitors the number of points on you Element14’s profile. Every time someone likes your contents, the number of points increase, and the device activates to compliment you by giving a pat on your shoulder. Stage 1: A Raspberry Pi with a camera “reads” a computer screen. An “emoticam” based on Raspberry PI HW camera, uses a technique known as neural style transfer, which allows you the overimpress your feelings to the pictures you are taking. By means of Tesseract, the image undergoes the OCR to detect extract the number of points. When the value changes, an output on a Pimoroni Automation hat is activated. When the value changes, an output on a Pimoroni Automation hat is activated. The output is connected to a relay which drives a heater. Stage 2: The heater heats a Thermorite thermal switch. When the target temperature is reached, the thermal switch closes and a Raspberry Pi Micro is powered up. The Raspberry Pi Micro drives a servo motor, that releases a bar made of harmonic steel. Stage 3: The steel bar passes by a TT Electronic reflective optical proximity switch. A Raspberry Pi Micro reads the output of the proximity sensor. When proximity sensor detects the bar, the Raspberry Pi Micro activates a servo. The lever on the servo shaft activates a switch. Stage 4: The lever on the servo shaft activates a switch which powers a TMC2300. The TMC2300 drives a stepper motor that winds a thread and powers up the next stage. Stage 5: The last step is a Raspberry Pi Micro that drives a servo that controls the pat-pat mechanism. The pat-pat mechanism is driven by a relic from many years ago.
| {gallery}My Gallery Title |
|---|
 |
|
|
|
|
|
|

First Place Winners:
The Junk-Pile Strobe Tachometer.....and it really works! by robogary
The inspiration for this project was the need to measure the speed of random - no nameplate DC motors salvaged from printers, cars, toys, and experimenter’s kits. In the spirit of Rube Goldberg, @robogary used as much workshop junk as possible to build his test instrument. For him, the older the part the better, old technology is quaint. Therefore clunkiness and awkwardness was encouraged as part of the build. Raspberry Pi Pico was selected as a controller based on its low cost, nice clock speeds and the easy way python programs with PWM. For more Rube-ness his workdesk which was a ping pong table had a Raspberry Pi dedicated to programming Raspberry Pi Picos in Thonny. A windows PC is used to VCN into the Raspberry Pi for control and WinSCP for the W10 PC to fetch the python code from the Raspberry Pi to the W10 PC.
| {gallery}My Gallery Title |
|---|
|
|
|
|
|
|
|
|




The Quantenkompassinator by javagoza
The Quantenkompassinator is an over-engineered motorized compass. Built around a Digilent Arty S7 50 board with an AMD Xilinx Spartan-7 FPGA, The Quantenkompassinator is an over-engineered motorized compass. It is a differential drive mobile robot with PID control that always points in the same direction using Memsic's MMC34160PJ magnetometer, two DC motors and rotational positon and speed feedback with hall effect magnetic sensors. The Quantenkompassinator compass allows you to locate quantum portals inside your house. The system is composed of a differential wheeled robot and a magnetometer. A differential wheeled robot is a mobile robot whose movement is based on two separately driven wheels placed on either side of the robot body. It can thus change its direction by varying the relative rate of rotation of its wheels and hence does not require an additional steering motion. When the two wheels spin in opposite directions because the two wheels are constrained by the physical mechanism to remain in a fixed geometric relationship to one another, these opposite but equal forward wheel speeds cause the robot to rotate, with both wheels velocities tangent to a circle of diameter centered at the origin of the body-attached frame. The horizontally positioned magnetometer informs the robot of its orientation. The robot continuously tries to orient the sensor at 0 degrees, towards North by turning the robot along the shortest path. The turns are made by moving one wheel in one direction and the other in the opposite direction using PWM signals controlled by a PID control system, keeping the center of the robot at the same point, without moving, just rotating. Four magnetic Hall sensors and two disks with small magnets attached to the shafts of the DC motors give feedback of the position and angular speed of the wheels. The desired effect is that the robot simulates the movement of the arrow of a classic magnetic compass. The OLED display is attached to JA Pmod connector and the Pmod CMPS2 compass sensor is attached to the JC Pmod connector on the Digilent Arty S7 board. The Quantenkompassinator is a stubborn robot who is determined to always face south. Why south? Very simple, it is very vain and likes to look handsome in the videos.
| {gallery}My Gallery Title |
|---|
 |
|
|
 |
|
|


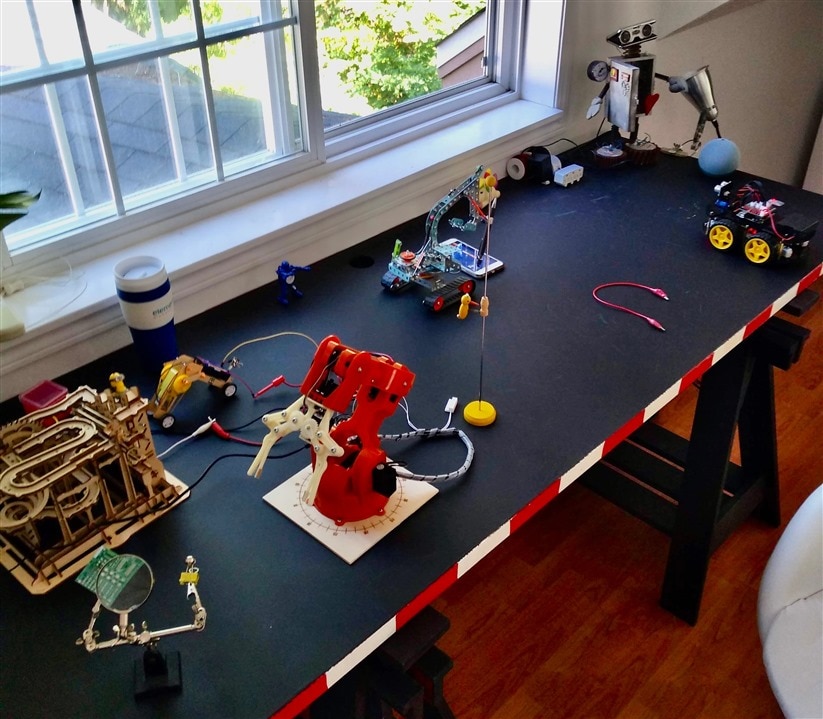
Rube Goldberg Machine to Turn On a Light by ntewinkel
@ntewinkel always wanted to build a Rube Goldberg Machine, but until now he had no idea how tedious - and painful - the process would be! It took him a LOT more pre-thinking and figuring out just to plan what was possible and how each step could trigger the next step. And oh boy is this thing ever finicky on exactly where each item has to be! He’s hoping to get proper government funding so that he can shrink down the machine into something that will fit into a standard electrical box that can be mounted in place of a regular light switch!
| {gallery}My Gallery Title |
|---|
|
|
Honorable Mention:
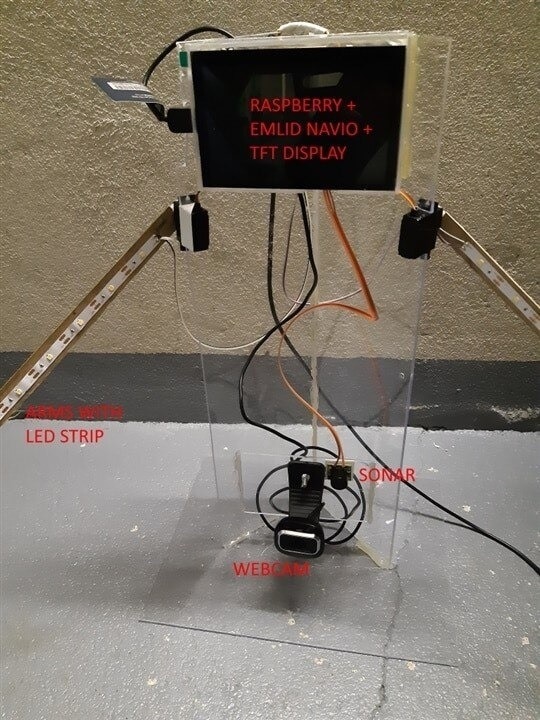
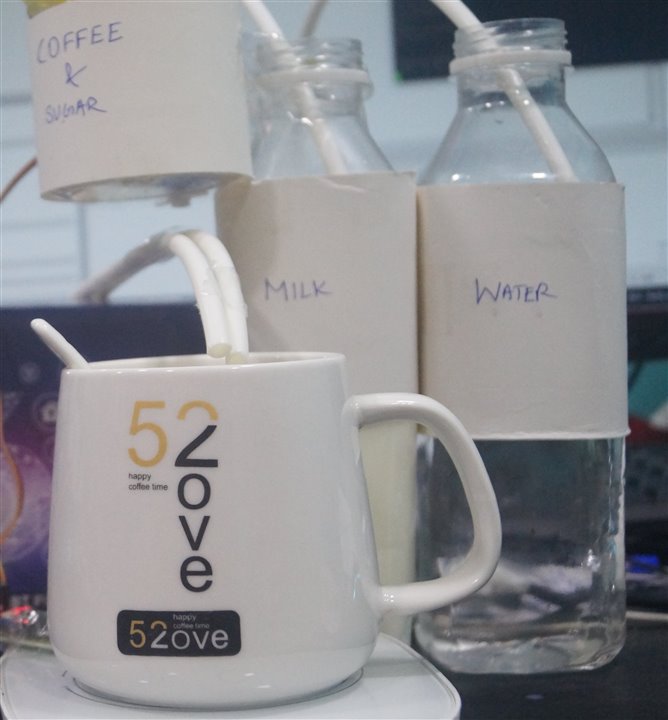
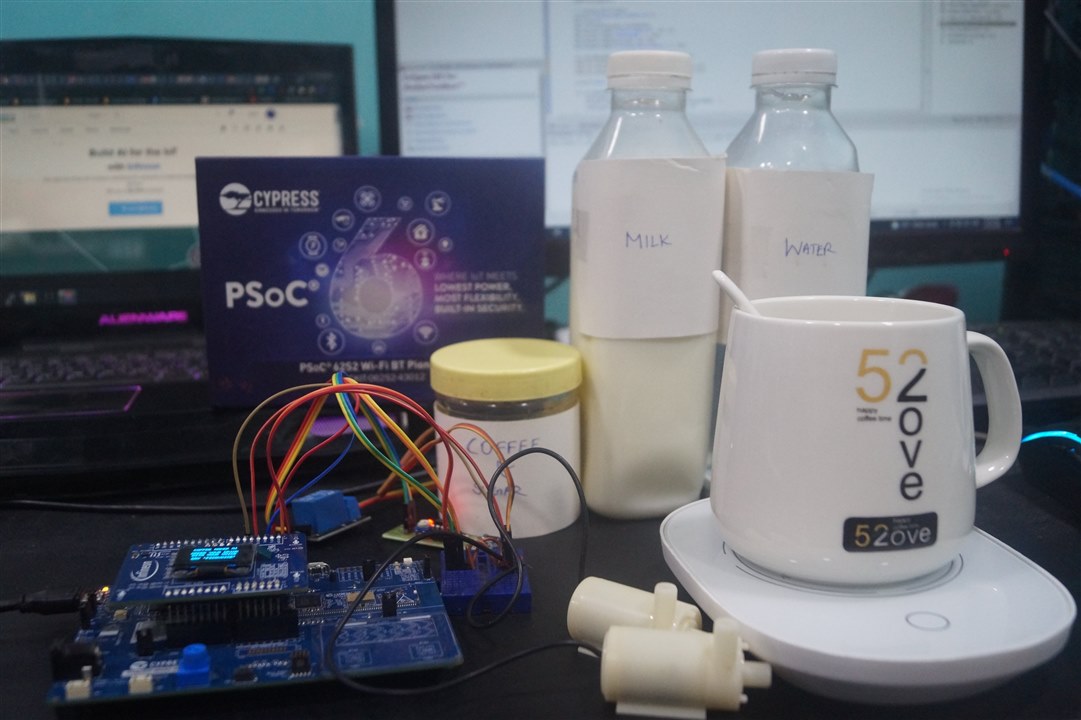
AI-powered Fully Automated Voice-Controlled Coffee maker by rahulkhanna
This fully automated coffee/tea maker can be turned on and controlled using voice commands. This can highly reduce the physical contact with the machine and can be implemented in public places, and in the office cafeterias. The System is designed to process the voice data using the XENSIVTm MEMS Microphone in real-time. The trained model is fed with the voice data and inference is used to process certain actions. When the correct wake is called, the system is initialized and the successive words are used to identify the drink. Using a PSoC 62S2 & the AIROC Wi-Fi/Bluetooth Pioneer Kit + IoT Sense will make this system more robust and easy to implement in real-time. The audio data is processed using Picovoice.
| {gallery}My Gallery Title |
|---|
|
|
|
|
 |
|
|

Keep Being Awesome and Thank you for your continued support of Project14!
-

dougw
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

dougw
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children