


Previous post in this blog sequence:
Kitchen Lighting System Phase 2
Kitchen Lighting System Phase 2 - Part 2
Kitchen Lighting System Phase 2 - part 3 - Let there be (better) light!
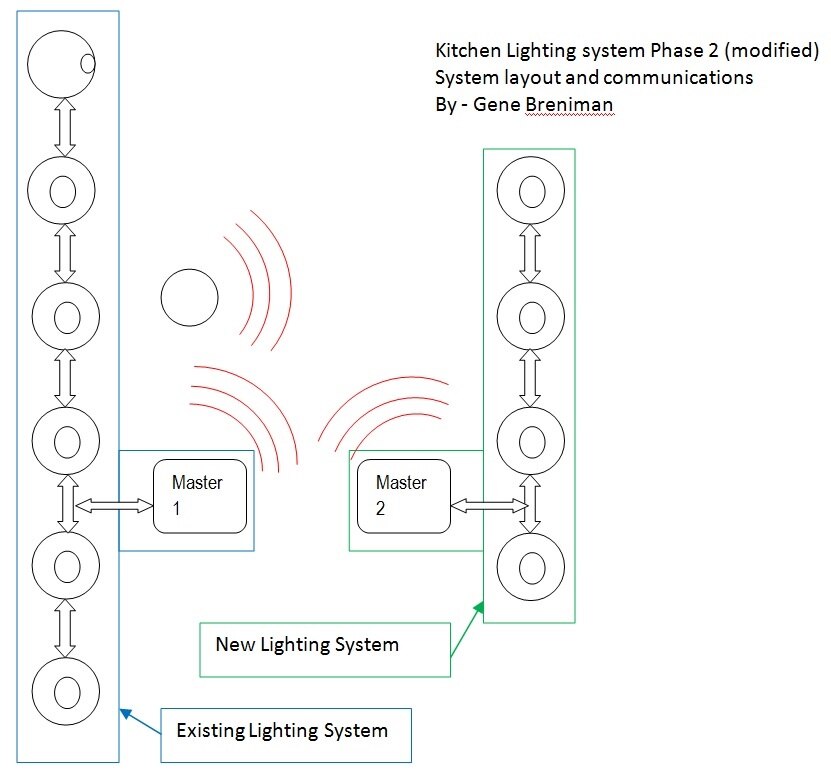
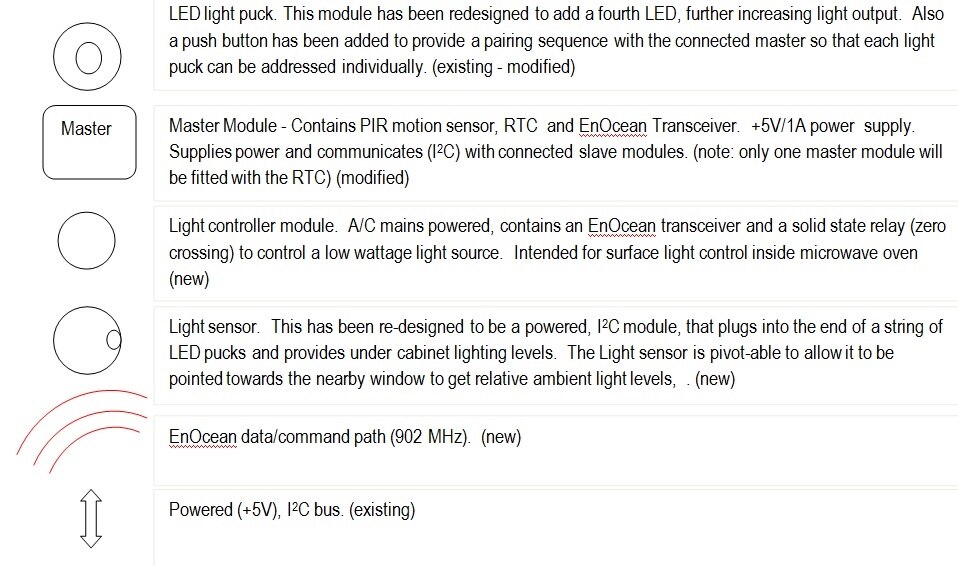
When I haven't been tending to the 3D printer, buzzing busily, building pieces for the light modules, I have been busy designing the electronics and PCBs for the system. I have changed a the overall plan a bit, eliminating the optional EnOcean light sensor module and replacing it with a newly designed, powered I2C connected light sensor. This new sensor plugs into the end light puck and provides light level readings to the connected master. Without further investing in tools for the EnOcean parts (i.e. development kit), I was not able to add a light sensor to my remote temperature sensor module, so I decided to spin a new sensor design. Here is the modified system diagram:
The new light sensor features a steerable light sensor, so I can get a better reading of the ambient light coming in from the dining nook connected to the kitchen. The light sensor design is based on the actual sensor (T-1 can), being placed into a steerable, sphere shaped piece that can pivot through a range of 90 degrees (directly down to horizontal), provided a way to get a good reading of light coming in the window. Here are the Fusion 360 views of the light sensor parts:
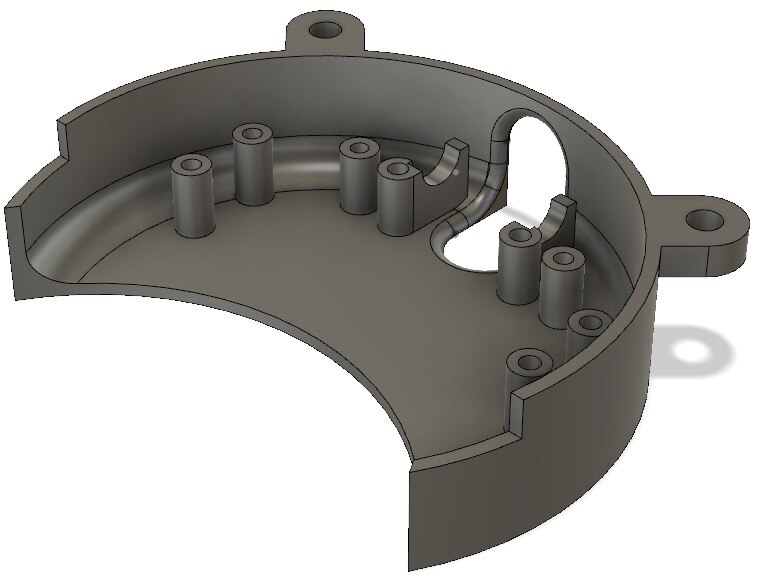
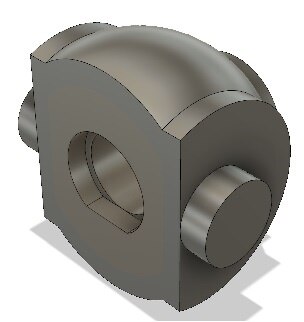
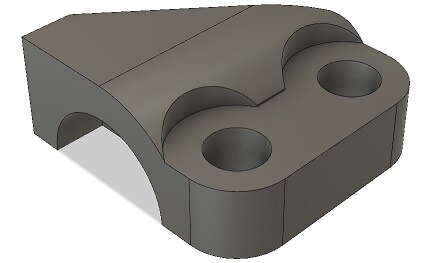
I had had printed a working model that I broke last night while trying to remove the sensor sphere (slight different design), so I reworked the parts to use the screw on pivot caps (shown about). I am printing parts and editing this blog, so I will still need to see how well this new design will work. The sensor case will snuggle up to the light puck case and plug into the I2C bus via the unused connector on the light puck (end of the line, no daisy chain to the next light).
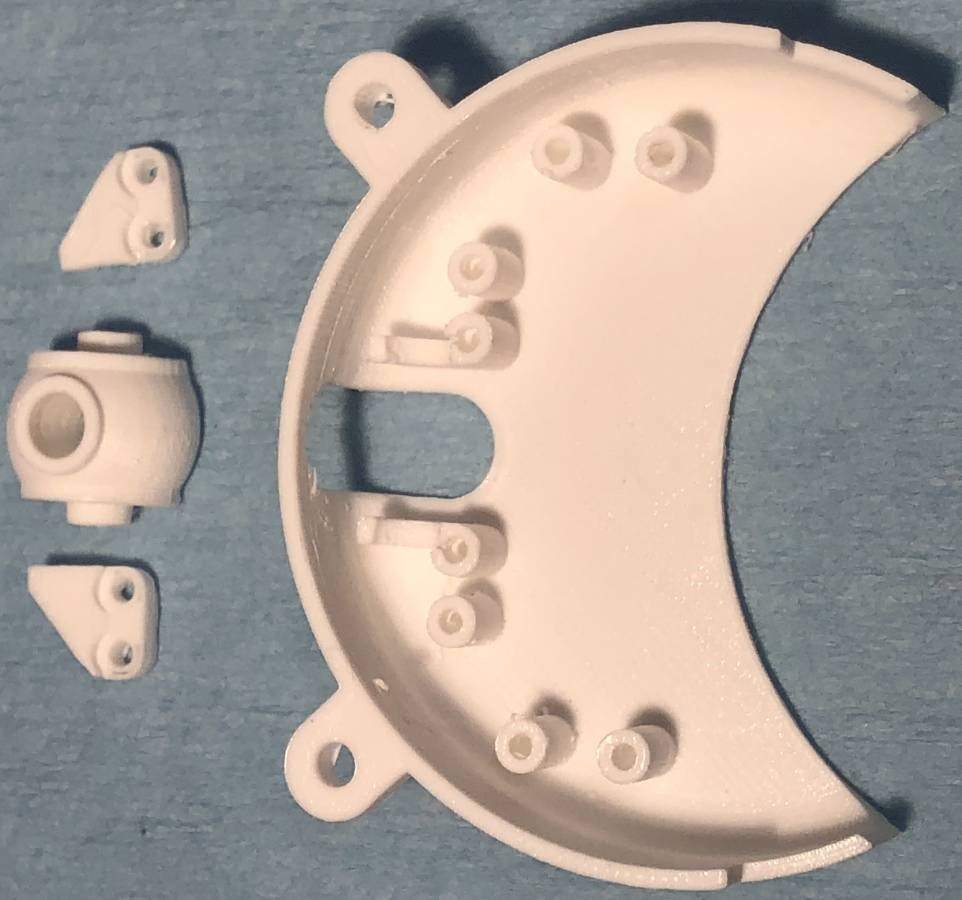
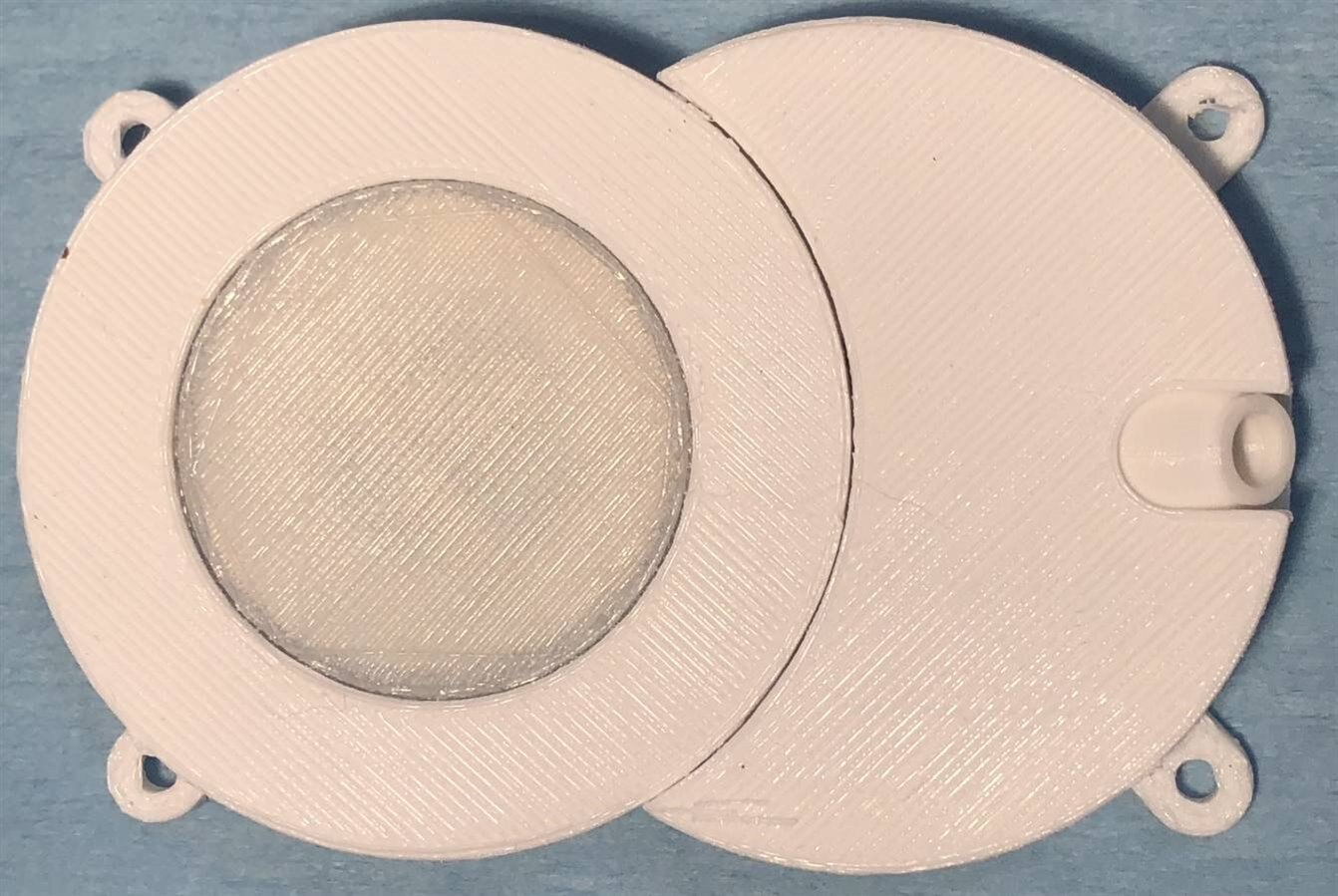
(Hot off the press - 3D printer - actual pieces)



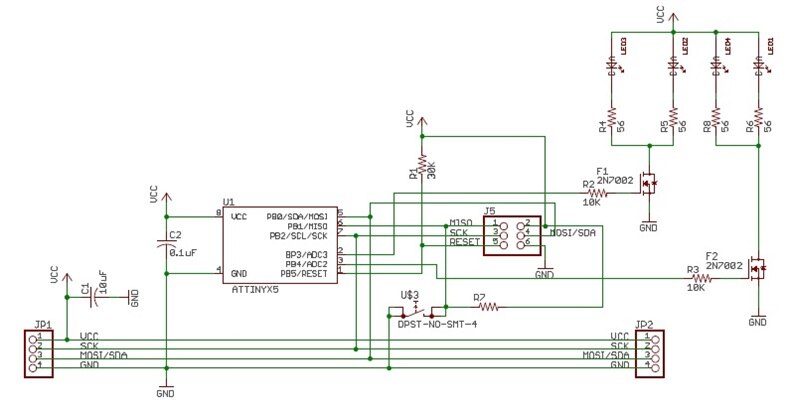
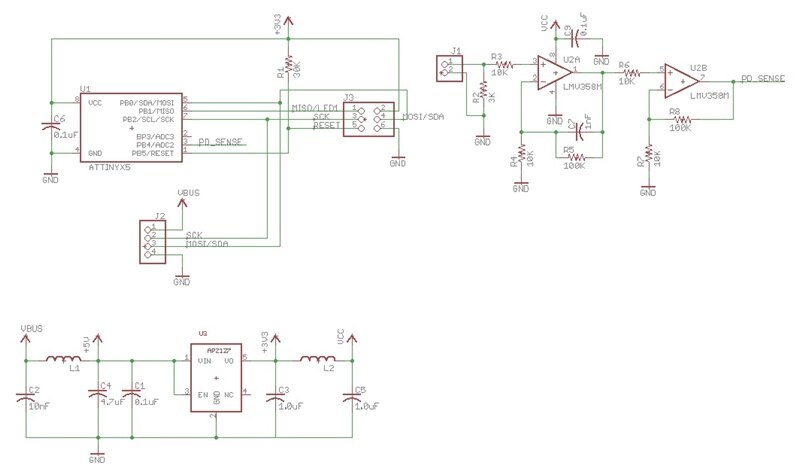
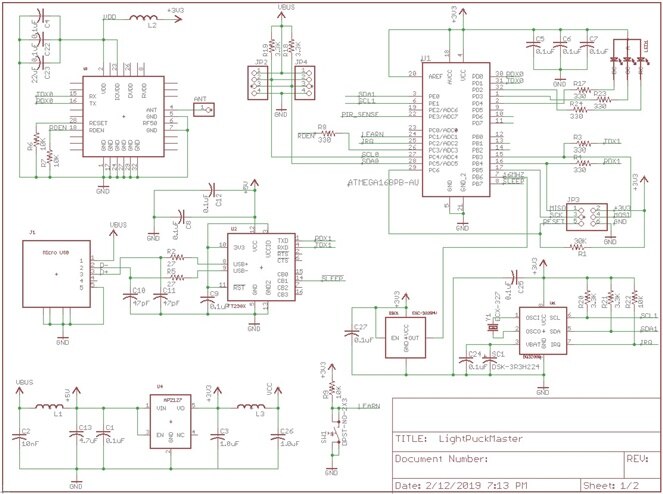
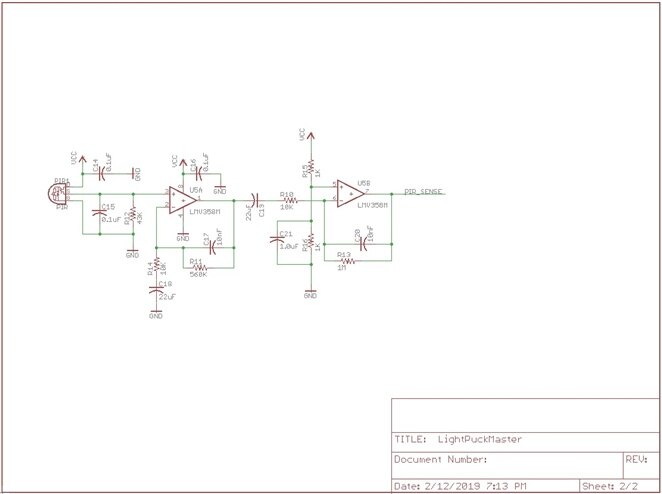
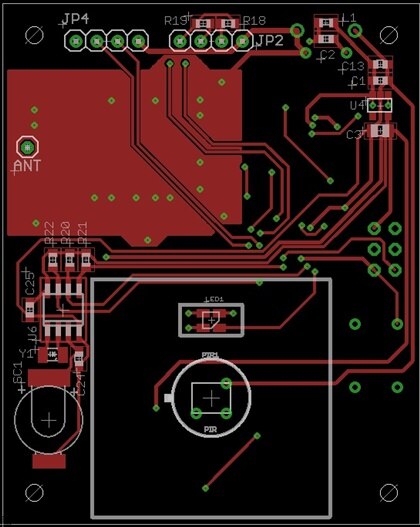
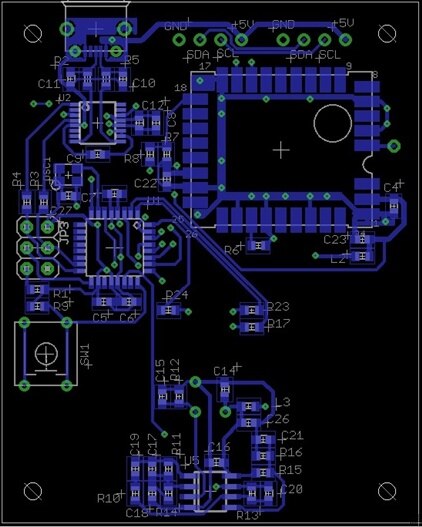
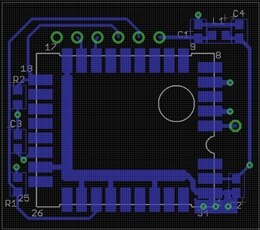
On the electronics side of things, I have completed the design and layout of all the PCBs (sent out for manufacturing today). Here are schematics and layouts for each of the PCB types:
Light Puck - The existing Light Puck PCBs have been redesigned to add a fourth LED to each of the pucks (33% more light output). The a pushputton switch has also been added to provide a pairing and enumeration ability to setup process so each LED puck can be independently commanded to a light level (lights closer to the window can be driven to a lower level to improve light uniformity).
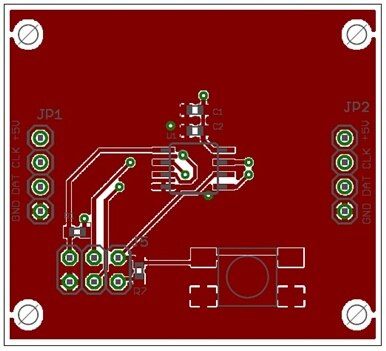
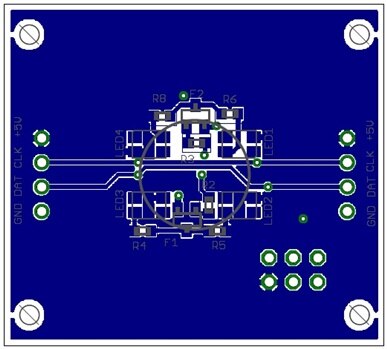
Light sensor module - The light sensor module uses a VTP9812FHVTP9812FH ambient light sensor (IR-blocking) to determine light levels. The sensor will be read at ~ 200Hz rate to help distinguish between sunlight and overhead lighting. It will report the sunlight levels to the connected master module (which will relay information to the second master, via an EnOcean telegram). The light levels will be used to determine system settings for PIR sensitivity/trip point, 'on' time and potentially individual light levels.

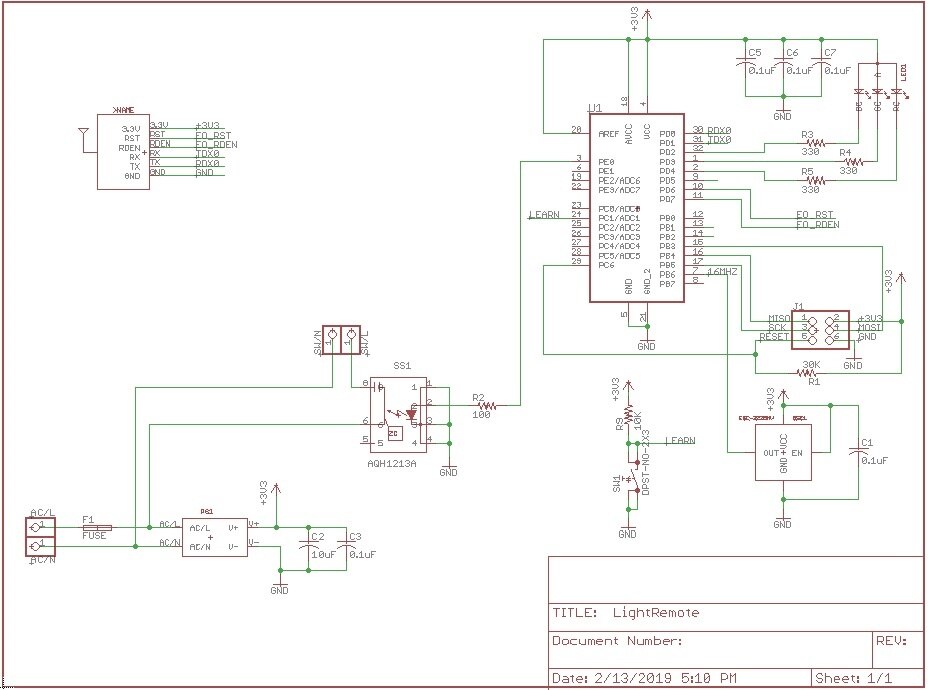
Master module - The master module drives the I2C bus and provides power to the connected light pucks. The master module also has an EnOcean TCM310U transceiver, PIR motion sensor, RTC and commissioning support resources (RGB LED and pushbutton).
- The TCM310U module is used to communicate between masters and to control the remote light switch embedded within the microwave oven.
- The PIR motion sensor is used to determine when people are in the kitchen and respond by turn on (or keeping on) the lights.
- The RTC module with a supercap backup supply (present on one master) is used to track time of day to assist in determining some of the system settings, i.e. nighttime, low PIR trip point, short 'on' time.
- The commissioning resources are used to pair (and enumerate) the light pucks to the connected master. The switch is pressed to set the master into an enrolling state, which will cause the master to listen for light pucks to announce their presences and then turn around an assign them an address for later communications. This process will continue until all of the light pucks have been assigned an address, and the enrolling state is canceled by pressing the switch again. The RGB LED will be used to show the enrolling state and to also act as a PIR motion sense indication.
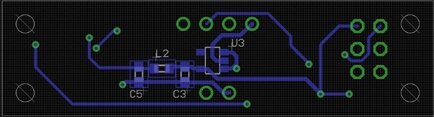
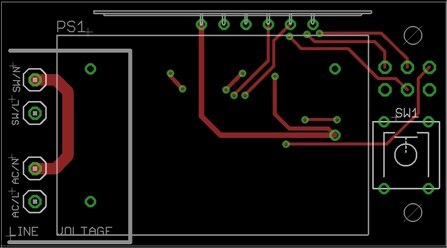
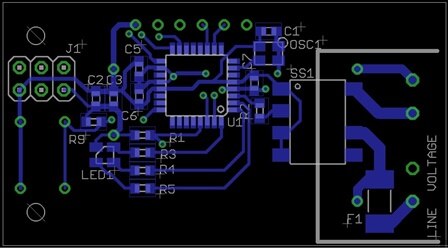
Switchable Load module - The switchable load module contains an EnOcean Tranceiver board (oriented vertical along side of the power supply), a 3.3 volt AC to DC converter , a solidstate relay to control the load and commissioning resources (pushbutton and RGB LED). This module will control the 20W equivalent LED light to illuminate the stove below. The EnOcean transceiver module allow this module to respond to master command based on PIR sensing. Care has been taken to minimize the PCB area for the load level voltages.
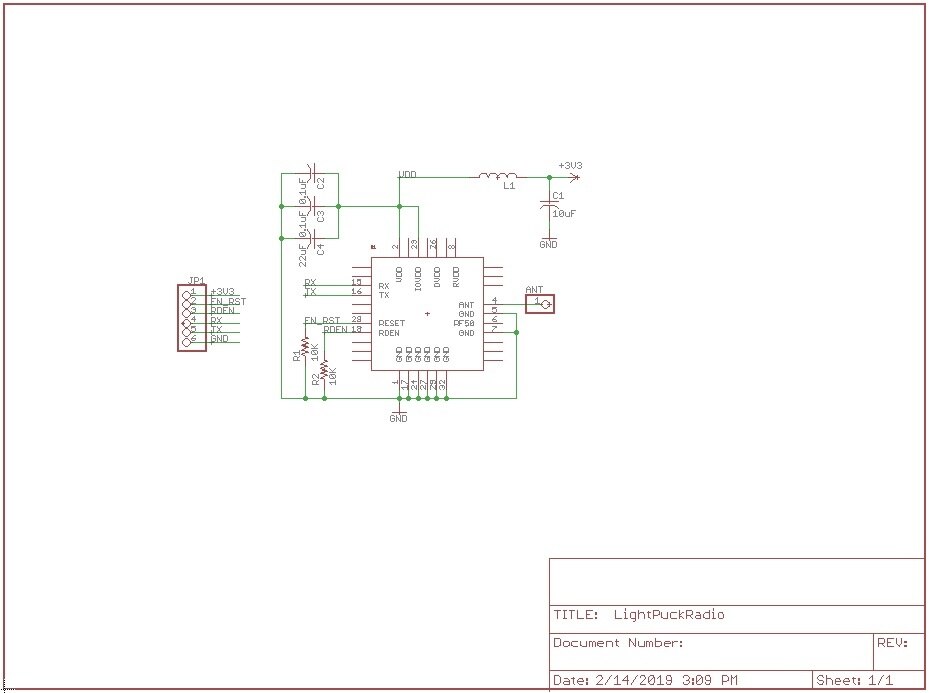
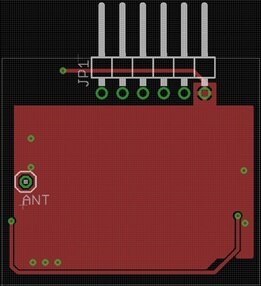
EnOcean Transceiver board - To minimize the size of the Switchable Load module a daughter board (vertical) was created to hold the EnOcean transceiver module. This PCB contains the bare minimum requirements to support the transceiver.
Now the waiting game begins as I await the PCBs and parts. I will be jumping over to some other projects that have been on hold as I was pretty busy getting to this level.
Thanks for reading along, more to come!
Gene
Top Comments
-

three-phase
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

three-phase
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children