Hello all,
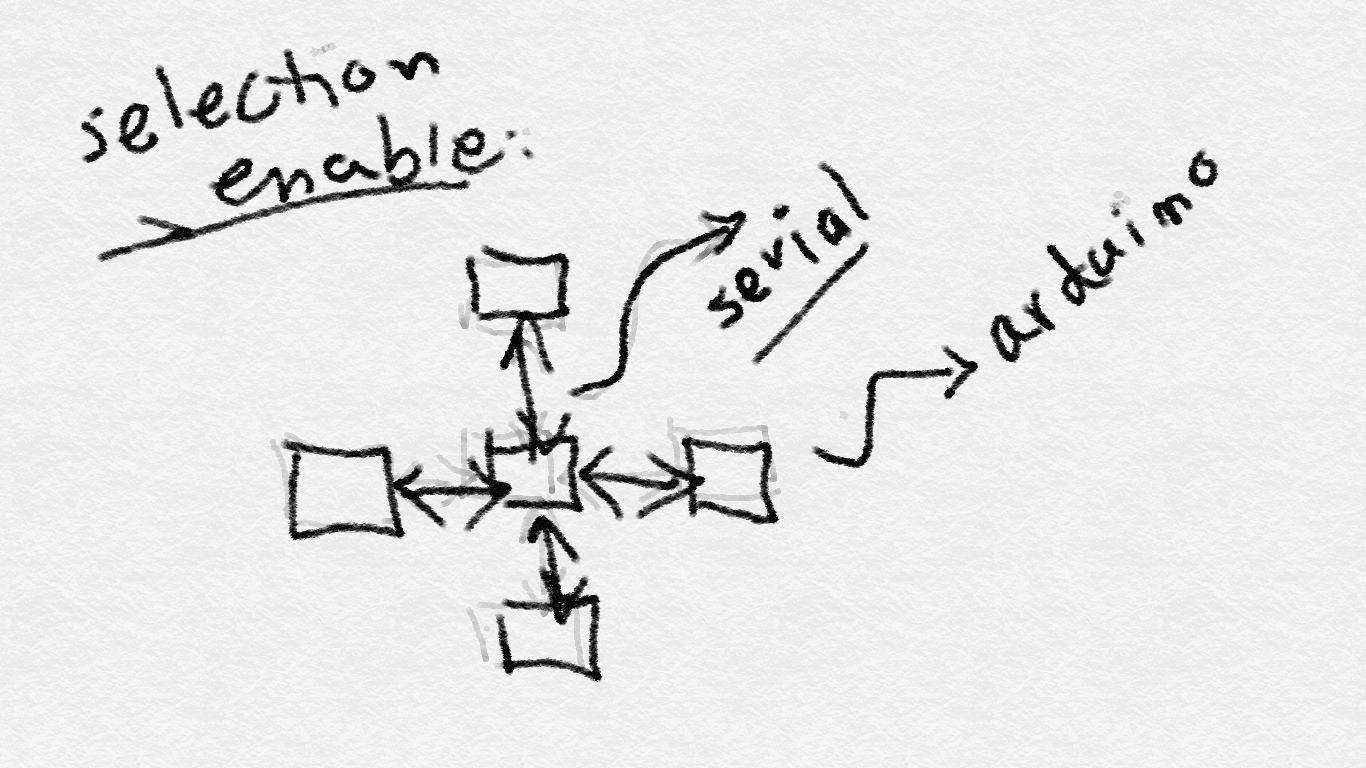
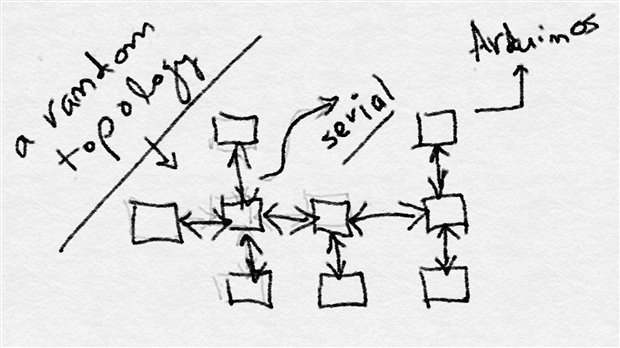
I am trying to talk to multiple (say 4) microcontrollers (Arduinos) at the same time. I was wondering if i can setup a serial connection, with a selection line that can detect the neighbor Arduino and enable the corresponding pin to start the serial communication between the two. something like this: