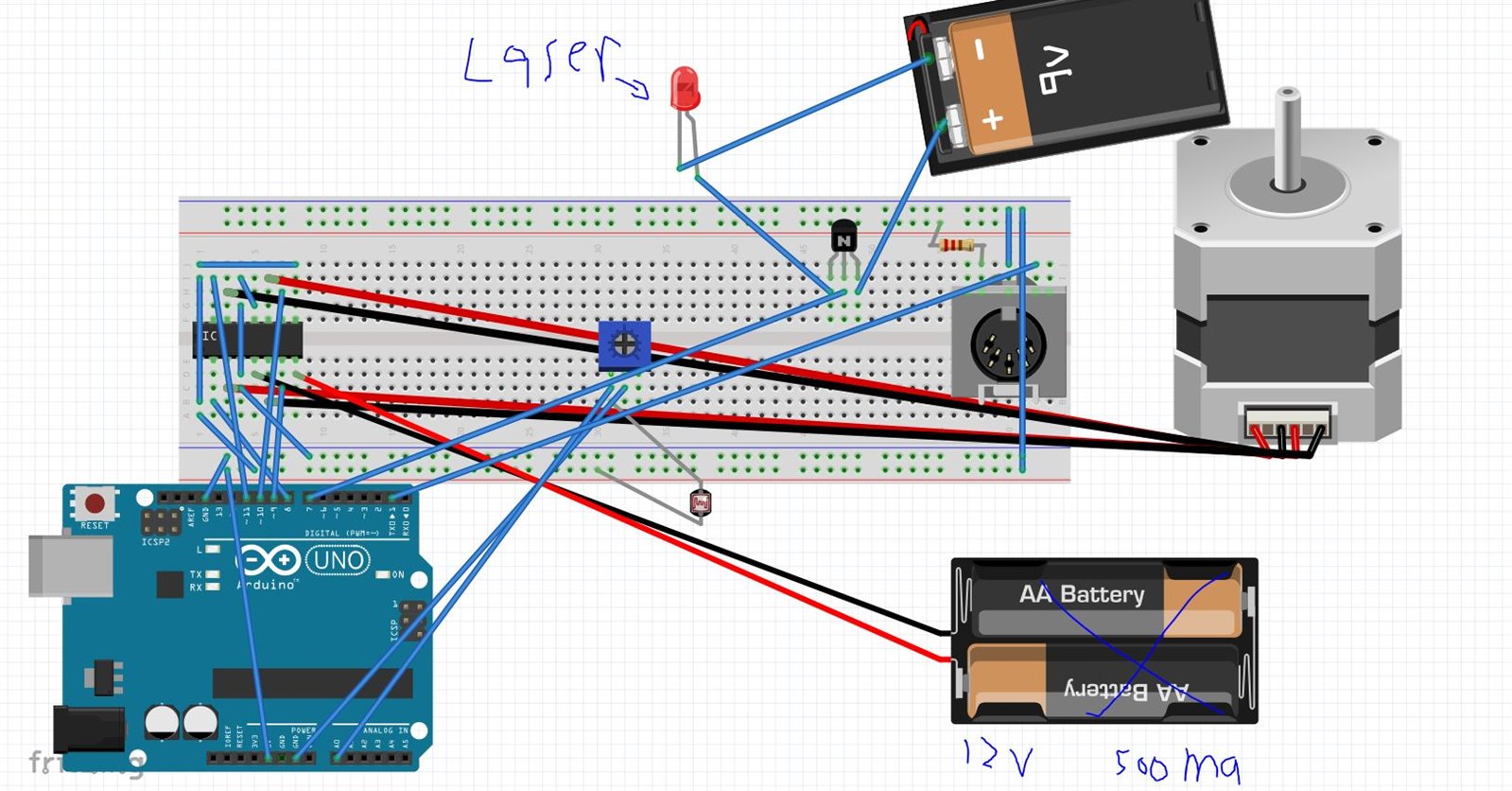
This instructable really interested me, Frameless Laser Harp - 4 , but i've never worked with steppers before. the stepper i got has 4 wires, but the stepper in the instructable has 6. on page 2 there is a wiring guide, but that wasn't very helpful to me, i didn't really understand what i'm supposed to do with the wires. This is the stepper i have, https://www.sparkfun.com/products/10551?gclid=Cj0KEQiApruyBRCFqoDu1pbk9rkBEiQAF8EFdVmEBorGt6koPmFkaibEpRmZ94Z6r8BWhmTqAL… . Any ideas?