


Hello,
I have RFID 13.56 MHz / NFC Module for Arduino from Cooking Hacks , I want to know how much time need a full read in a block process ?
I tried with millis () function and I get this :
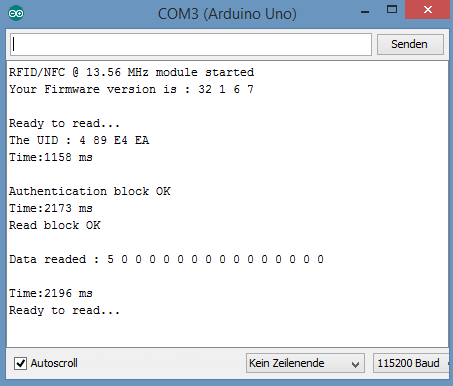
I get 2196 ms . is that right ? I think it's so much
Rita
Hello,
I have RFID 13.56 MHz / NFC Module for Arduino from Cooking Hacks , I want to know how much time need a full read in a block process ?
I tried with millis () function and I get this :
I get 2196 ms . is that right ? I think it's so much
Rita
It does seem a little slow but I dont have one to try out so nothing to compare to
What is the code your using to time the read, can you please provide in here
Thanks
It does seem a little slow but I dont have one to try out so nothing to compare to
What is the code your using to time the read, can you please provide in here
Thanks

/*
* RFID/NFC Modul for Arduino
* Read a block
*/
uint8_t dataRX[35];//Receive buffer.
uint8_t dataTX[35];//Transmit buffer.
uint8_t _UID[4];// stores the UID (unique identifier) of a card.
uint8_t keyAccess[] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF } ;// stores the key or password.
uint8_t address = 0x04;//Address to read.
uint8_t ATQ[2];//Answer to request
uint8_t state;//state of the process
uint8_t aux[16];//Auxiliar buffer.
unsigned long time;
void setup()
{
//Start serial port 115200 bps:
Serial.begin(115200);
delay(100);
Serial.print("RFID/NFC @ 13.56 MHz module started");
delay(1000);
//!It is needed to launch a simple command to sycnchronize
getFirmware();
configureSAM();
}
void loop()
{
Serial.print("\n");
Serial.print("Ready to read...");
/////////////////////////////////////////////////////////////
//Get the UID Identifier
init(_UID, ATQ);
Serial.print("\n");
Serial.print( "The UID : ");
print(_UID , 4);
time = millis();//prints time since program started
Serial.print("Time:");
Serial.print(time);
Serial.print(" ");
Serial.write("ms");
////////////////////////////////////////////////////////////
//Auntenticate a block with his keyAccess
state = authenticate(_UID, address, keyAccess);
Serial.print("\n");
if ( state == 0) {
Serial.println("Authentication block OK");
time = millis();//prints time since program started
Serial.print("Time:");
Serial.print(time);
Serial.print(" ");
Serial.write("ms");
} else {
Serial.println("Authentication failed");
}
/////////////////////////////////////////////////////////////
//Read from address after authentication
state = readData(address, aux);
Serial.print("\n");
if (state == 0) {
Serial.println("Read block OK");
} else {
Serial.println("Read failed");
}
Serial.print("\n");
Serial.print("Data readed : ");
print(aux , 16);
Serial.print("\n");
time = millis();//prints time since program started
Serial.print("Time:");
Serial.print(time);
Serial.print(" ");
Serial.write("ms");
delay(2000);
}
//**********************************************************************
//!The goal of this command is to detect as many targets (maximum MaxTg)
// as possible in passive mode.
uint8_t init(uint8_t *UID , uint8_t *ATQ) //! Request InListPassive
{
Serial.flush();
dataTX[0] = 0x04; // Length
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4;
dataTX[3] = 0x4A; // Code
dataTX[4] = 0x01; //MaxTarget
dataTX[5] = 0x00; //BaudRate = 106Kbps
dataTX[6] = 0x00; // Clear checkSum position
checkSum(dataTX);
sendTX(dataTX , 7 ,23);
for (int i = 17; i < (21) ; i++){
_UID[i-17] = dataRX[i];
UID[i-17] = _UID[i-17];
}
ATQ[0] = dataRX[13];
ATQ[1] = dataRX[14];
if ((dataRX[9]== 0xD5) & (dataRX[10] == 0x4B) & (dataRX[11] == 0x01)) {
return 0;
} else {
return 1;
}
}
//**********************************************************************
//!A block must be authenticated before read and write operations
uint8_t authenticate(uint8_t *UID, uint8_t blockAddress, uint8_t *keyAccess)
{
dataTX[0] = 0x0F;
lengthCheckSum(dataTX);
dataTX[2] = 0xD4;
dataTX[3] = 0x40; // inDataEchange
dataTX[4] = 0x01; //Number of targets
dataTX[5] = 0x60; // Authentication code
dataTX[6] = blockAddress;
for (int i = 0; i < 6 ; i++) {
dataTX[i + 7] = keyAccess[i];
}
dataTX[13] = UID[0]; dataTX[14] = UID[1];
dataTX[15] = UID[2]; dataTX[16] = UID[3];
dataTX[17] = 0x00;
checkSum(dataTX);
sendTX(dataTX , 18 ,14);
if ((dataRX[9]== 0xD5) & (dataRX[10] == 0x41) & (dataRX[11] == 0x00)) {
return 0;
} else {
return 1;
}
}
//**********************************************************************
//!Write 16 bytes in address .
uint8_t writeData(uint8_t address, uint8_t *blockData) //!Writing
{
Serial.print(" ");
dataTX[0] = 0x15;
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4;
dataTX[3] = 0x40;//inDataEchange CODE
dataTX[4] = 0x01;//Number of targets
dataTX[5] = 0xA0;//Write Command
dataTX[6] = address; //Address
for (int i = 0; i < 16; i++) {
dataTX[i+7] = blockData[i];
}
dataTX[23] = 0x00;
checkSum(dataTX);
sendTX(dataTX , 24 ,14);
if ((dataRX[9]== 0xD5) & (dataRX[10] == 0x41) & (dataRX[11] == 0x00)) {
return 0;
} else {
return 1;
}
}
//**********************************************************************
//!Read 16 bytes from address .
uint8_t readData(uint8_t address, uint8_t *readData) //!Reading
{
Serial.print(" ");
dataTX[0] = 0x05;
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4; // Code
dataTX[3] = 0x40; // Code
dataTX[4] = 0x01; // Number of targets
dataTX[5] = 0x30; //ReadCode
dataTX[6] = address; //Read address
dataTX[7] = 0x00;
checkSum(dataTX);
sendTX(dataTX , 8, 30);
memset(readData, 0x00, 16);
if ((dataRX[9]== 0xD5) & (dataRX[10] == 0x41) & (dataRX[11] == 0x00)) {
for (int i = 12; i < 28; i++) {
readData[i-12] = dataRX[i];
}
return 0;
} else {
return 1;
}
}
//**********************************************************************
//!The PN532 sends back the version of the embedded firmware.
bool getFirmware(void) //! It is needed to launch a simple command to sycnchronize
{
Serial.print(" ");
memset(dataTX, 0x00, 35);
dataTX[0] = 0x02; // Length
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4; // CODE
dataTX[3] = 0x02; //TFI
checkSum(dataTX); //0x2A; //Checksum
sendTX(dataTX , 5 , 17);
Serial.print("\n");
Serial.print("Your Firmware version is : ");
for (int i = 11; i < (15) ; i++){
Serial.print(dataRX[i], HEX);
Serial.print(" ");
}
Serial.print("\n");
}
//**********************************************************************
//!Print data stored in vectors .
void print(uint8_t * _data, uint8_t length)
{
for (int i = 0; i < length ; i++){
Serial.print(_data[i], HEX);
Serial.print(" ");
}
Serial.print("\n");
}
//**********************************************************************
//!This command is used to set internal parameters of the PN532,
bool configureSAM(void)//! Configure the SAM
{
Serial.print(" ");
dataTX[0] = 0x05; //Length
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4;
dataTX[3] = 0x14;
dataTX[4] = 0x01; // Normal mode
dataTX[5] = 0x14; // TimeOUT
dataTX[6] = 0x00; // IRQ
dataTX[7] = 0x00; // Clean checkSum position
checkSum(dataTX);
sendTX(dataTX , 8, 13);
}
//**********************************************************************
//!Send data stored in dataTX
void sendTX(uint8_t *dataTX, uint8_t length, uint8_t outLength)
{
Serial.print(char(0x00));
Serial.print(char(0x00));
Serial.print(char(0xFF));
for (int i = 0; i < length; i++) {
Serial.print(char(dataTX[i]));
}
Serial.print(char(0x00));
getACK();
waitResponse();// Receive response
getData(outLength);
}
//**********************************************************************
//!Wait for ACK response and stores it in the dataRX buffer
void getACK(void)
{
delay(5);
waitResponse();
for (int i = 0; i < 5 ; i++) {
dataRX[i] = Serial.read();
}
}
//**********************************************************************
//!Wait the response of the module
void waitResponse(void)
{
int val = 0xFF;
int cont = 0x00;
while(val != 0x00) { //Wait for 0x00 response
val = Serial.read();
delay(5);
cont ++;
}
}
//**********************************************************************
//!Get data from the module
void getData(uint8_t outLength)
{
for (int i=5; i < outLength; i++) {
dataRX[i] = Serial.read();//read data from the module.
}
}
//**********************************************************************
//!Calculates the checksum and stores it in dataTX buffer
void checkSum(uint8_t *dataTX)
{
for (int i = 0; i < dataTX[0] ; i++) {
dataTX[dataTX[0] + 2] += dataTX[i + 2];
}
byte(dataTX[dataTX[0] + 2]= - dataTX[dataTX[0] + 2]);
}
//**********************************************************************
//!Calculates the length checksum and sotres it in the buffer.
uint8_t lengthCheckSum(uint8_t *dataTX)
{
dataTX[1] = byte(0x100 - dataTX[0]);
}
ok, try this
/*
* RFID/NFC Modul for Arduino
* Read a block
*/
uint8_t dataRX[35];//Receive buffer.
uint8_t dataTX[35];//Transmit buffer.
uint8_t _UID[4];// stores the UID (unique identifier) of a card.
uint8_t keyAccess[] = { 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF };// stores the key or password.
uint8_t address = 0x04;//Address to read.
uint8_t ATQ[2];//Answer to request
uint8_t state;//state of the process
uint8_t aux[16];//Auxiliar buffer.
unsigned long time;
unsigned long loop_time; // less the 2 second delay... dont forget
unsigned long function_time;
void setup()
{
//Start serial port 115200 bps:
Serial.begin(115200);
delay(100);
Serial.println("RFID/NFC @ 13.56 MHz module started");
delay(1000);
//!It is needed to launch a simple command to sycnchronize
getFirmware();
configureSAM();
}
void loop()
{
Serial.print("\nReady to read..."); // optimise the prints by putting the new lines in the same print as the actual print
loop_time = 0; // reset the loop timer
/////////////////////////////////////////////////////////////
//Get the UID Identifier
function_time = millis(); // we already had a one second delay in setup that is not part of the timeing so lets start with a clean count
init(_UID, ATQ);
time = millis() - function_time; //prints time to get the UID
loop_time += time;
Serial.print("\nThe UID : ");
print(_UID, 4);
Serial.print("Time:");
Serial.print(time);
Serial.println(" ms"); // dont need the space and the ms on seperate prints, just do it in one, also by using println you get the new line at the end automatically
////////////////////////////////////////////////////////////
//Auntenticate a block with his keyAccess
function_time = millis();
state = authenticate(_UID, address, keyAccess);
time = millis() - function_time;//time the call
loop_time += time; // add this call to the overall time
Serial.print("\n");
if (state == 0) {
Serial.println("Authentication block OK");
Serial.print("Time:");
Serial.print(time);
Serial.println(" ms");
}
else {
Serial.println("Authentication failed");
}
/////////////////////////////////////////////////////////////
//Read from address after authentication
function_time = millis();
state = readData(address, aux);
time = millis() - function_time; // time the call
loop_time += time; // add this call to the overall time
Serial.print("\n");
if (state == 0) {
Serial.println("Read block OK");
}
else {
Serial.println("Read failed");
}
Serial.print("\nData readed : ");
print(aux, 16);
Serial.print("\nTime:");
Serial.print(time);
Serial.println(" ms");
Serial.print("\nTotal call time : ");
Serial.print(loop_time);
Serial.println(" ms");
delay(2000); // wait 2 seconds before we loop again
}
//**********************************************************************
//!The goal of this command is to detect as many targets (maximum MaxTg)
// as possible in passive mode.
uint8_t init(uint8_t *UID, uint8_t *ATQ) //! Request InListPassive
{
Serial.flush();
dataTX[0] = 0x04; // Length
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4;
dataTX[3] = 0x4A; // Code
dataTX[4] = 0x01; //MaxTarget
dataTX[5] = 0x00; //BaudRate = 106Kbps
dataTX[6] = 0x00; // Clear checkSum position
checkSum(dataTX);
sendTX(dataTX, 7, 23);
for (int i = 17; i < (21); i++) {
_UID[i - 17] = dataRX[i];
UID[i - 17] = _UID[i - 17];
}
ATQ[0] = dataRX[13];
ATQ[1] = dataRX[14];
if ((dataRX[9] == 0xD5) & (dataRX[10] == 0x4B) & (dataRX[11] == 0x01)) {
return 0;
}
else {
return 1;
}
}
//**********************************************************************
//!A block must be authenticated before read and write operations
uint8_t authenticate(uint8_t *UID, uint8_t blockAddress, uint8_t *keyAccess)
{
dataTX[0] = 0x0F;
lengthCheckSum(dataTX);
dataTX[2] = 0xD4;
dataTX[3] = 0x40; // inDataEchange
dataTX[4] = 0x01; //Number of targets
dataTX[5] = 0x60; // Authentication code
dataTX[6] = blockAddress;
for (int i = 0; i < 6; i++) {
dataTX[i + 7] = keyAccess[i];
}
dataTX[13] = UID[0]; dataTX[14] = UID[1];
dataTX[15] = UID[2]; dataTX[16] = UID[3];
dataTX[17] = 0x00;
checkSum(dataTX);
sendTX(dataTX, 18, 14);
if ((dataRX[9] == 0xD5) & (dataRX[10] == 0x41) & (dataRX[11] == 0x00)) {
return 0;
}
else {
return 1;
}
}
//**********************************************************************
//!Write 16 bytes in address .
uint8_t writeData(uint8_t address, uint8_t *blockData) //!Writing
{
Serial.print(" ");
dataTX[0] = 0x15;
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4;
dataTX[3] = 0x40;//inDataEchange CODE
dataTX[4] = 0x01;//Number of targets
dataTX[5] = 0xA0;//Write Command
dataTX[6] = address; //Address
for (int i = 0; i < 16; i++) {
dataTX[i + 7] = blockData[i];
}
dataTX[23] = 0x00;
checkSum(dataTX);
sendTX(dataTX, 24, 14);
if ((dataRX[9] == 0xD5) & (dataRX[10] == 0x41) & (dataRX[11] == 0x00)) {
return 0;
}
else {
return 1;
}
}
//**********************************************************************
//!Read 16 bytes from address .
uint8_t readData(uint8_t address, uint8_t *readData) //!Reading
{
Serial.print(" ");
dataTX[0] = 0x05;
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4; // Code
dataTX[3] = 0x40; // Code
dataTX[4] = 0x01; // Number of targets
dataTX[5] = 0x30; //ReadCode
dataTX[6] = address; //Read address
dataTX[7] = 0x00;
checkSum(dataTX);
sendTX(dataTX, 8, 30);
memset(readData, 0x00, 16);
if ((dataRX[9] == 0xD5) & (dataRX[10] == 0x41) & (dataRX[11] == 0x00)) {
for (int i = 12; i < 28; i++) {
readData[i - 12] = dataRX[i];
}
return 0;
}
else {
return 1;
}
}
//**********************************************************************
//!The PN532 sends back the version of the embedded firmware.
bool getFirmware(void) //! It is needed to launch a simple command to sycnchronize
{
Serial.print(" ");
memset(dataTX, 0x00, 35);
dataTX[0] = 0x02; // Length
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4; // CODE
dataTX[3] = 0x02; //TFI
checkSum(dataTX); //0x2A; //Checksum
sendTX(dataTX, 5, 17);
Serial.print("Your Firmware version is : ");
for (int i = 11; i < (15); i++) {
Serial.print(dataRX[i], HEX);
Serial.print(" ");
}
Serial.print("\n");
}
//**********************************************************************
//!Print data stored in vectors .
void print(uint8_t * _data, uint8_t length)
{
for (int i = 0; i < length; i++) {
Serial.print(_data[i], HEX);
Serial.print(" ");
}
Serial.print("\n");
}
//**********************************************************************
//!This command is used to set internal parameters of the PN532,
bool configureSAM(void)//! Configure the SAM
{
Serial.print(" ");
dataTX[0] = 0x05; //Length
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4;
dataTX[3] = 0x14;
dataTX[4] = 0x01; // Normal mode
dataTX[5] = 0x14; // TimeOUT
dataTX[6] = 0x00; // IRQ
dataTX[7] = 0x00; // Clean checkSum position
checkSum(dataTX);
sendTX(dataTX, 8, 13);
}
//**********************************************************************
//!Send data stored in dataTX
void sendTX(uint8_t *dataTX, uint8_t length, uint8_t outLength)
{
Serial.print(char(0x00));
Serial.print(char(0x00));
Serial.print(char(0xFF));
for (int i = 0; i < length; i++) {
Serial.print(char(dataTX[i]));
}
Serial.print(char(0x00));
getACK();
waitResponse();// Receive response
getData(outLength);
}
//**********************************************************************
//!Wait for ACK response and stores it in the dataRX buffer
void getACK(void)
{
delay(5);
waitResponse();
for (int i = 0; i < 5; i++) {
dataRX[i] = Serial.read();
}
}
//**********************************************************************
//!Wait the response of the module
void waitResponse(void)
{
int val = 0xFF;
int cont = 0x00;
while (val != 0x00) { //Wait for 0x00 response
val = Serial.read();
delay(5);
cont++;
}
}
//**********************************************************************
//!Get data from the module
void getData(uint8_t outLength)
{
for (int i = 5; i < outLength; i++) {
dataRX[i] = Serial.read();//read data from the module.
}
}
//**********************************************************************
//!Calculates the checksum and stores it in dataTX buffer
void checkSum(uint8_t *dataTX)
{
for (int i = 0; i < dataTX[0]; i++) {
dataTX[dataTX[0] + 2] += dataTX[i + 2];
}
byte(dataTX[dataTX[0] + 2] = -dataTX[dataTX[0] + 2]);
}
//**********************************************************************
//!Calculates the length checksum and sotres it in the buffer.
uint8_t lengthCheckSum(uint8_t *dataTX)
{
dataTX[1] = byte(0x100 - dataTX[0]);
}
I took out some redundent print statements (Or not necessary as they can be optimised into single line), I hope this did not break the code
The main mistake you where doing is this
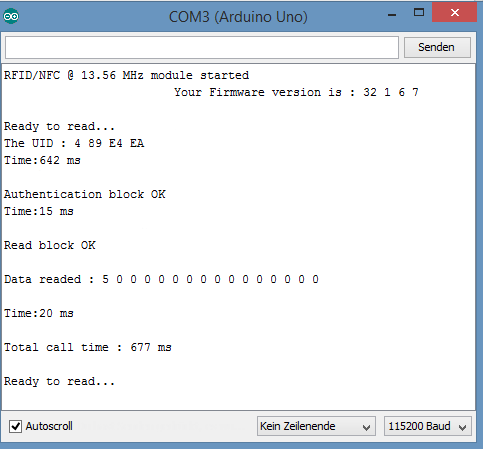
the main loop has a 2 second delay in it, you where not eliminating this from your timeing, second you had a one second delay in startup, this was also included in your time, then you also had all the print statements to the screen (Console) also included in your time
What I did and the main change in your code is introduce a seperate timer value "function_time" that is set to millis() just before a call to read the chips, then I subtract it from the new mills() once done, this tells us how long the function call actually took. The "loop_time" simply adds up all the funcrtion_time values to see what the total is without having to keep track with a calculator after a run
Hope this helps
It seems better
Thanks for reply.
Rita
good, that first one still seems a little slow but that may be its nature
Glad it helped
Peter
Hi Peter ,
is the first Time just to get the UID?
what reason can I give, that's the time so long is for UID ?
Regards ,
Rita

See http://electronics.howstuffworks.com/near-field-communication.htm . This explains some of what NFC does. To protect the transmission, a handshake is made to verify and encrypt later transmissions that will be made resulting in a UID. I can write a book here, but just say encryption is not cheap to set up both in processor and communication.
Clem