


Hello,
I have RFID 13.56 MHz / NFC Module for Arduino from Cooking Hacks , I want to know how much time need a full read in a block process ?
I tried with millis () function and I get this :
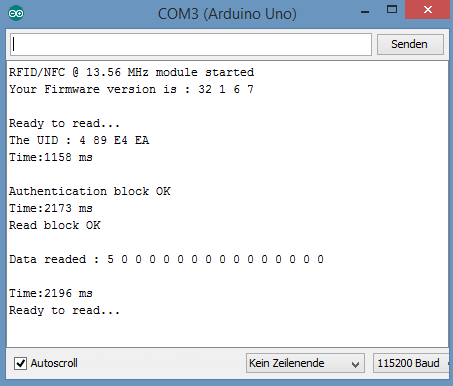
I get 2196 ms . is that right ? I think it's so much
Rita
Hello,
I have RFID 13.56 MHz / NFC Module for Arduino from Cooking Hacks , I want to know how much time need a full read in a block process ?
I tried with millis () function and I get this :
I get 2196 ms . is that right ? I think it's so much
Rita
It does seem a little slow but I dont have one to try out so nothing to compare to
What is the code your using to time the read, can you please provide in here
Thanks

/*
* RFID/NFC Modul for Arduino
* Read a block
*/
uint8_t dataRX[35];//Receive buffer.
uint8_t dataTX[35];//Transmit buffer.
uint8_t _UID[4];// stores the UID (unique identifier) of a card.
uint8_t keyAccess[] = {0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF } ;// stores the key or password.
uint8_t address = 0x04;//Address to read.
uint8_t ATQ[2];//Answer to request
uint8_t state;//state of the process
uint8_t aux[16];//Auxiliar buffer.
unsigned long time;
void setup()
{
//Start serial port 115200 bps:
Serial.begin(115200);
delay(100);
Serial.print("RFID/NFC @ 13.56 MHz module started");
delay(1000);
//!It is needed to launch a simple command to sycnchronize
getFirmware();
configureSAM();
}
void loop()
{
Serial.print("\n");
Serial.print("Ready to read...");
/////////////////////////////////////////////////////////////
//Get the UID Identifier
init(_UID, ATQ);
Serial.print("\n");
Serial.print( "The UID : ");
print(_UID , 4);
time = millis();//prints time since program started
Serial.print("Time:");
Serial.print(time);
Serial.print(" ");
Serial.write("ms");
////////////////////////////////////////////////////////////
//Auntenticate a block with his keyAccess
state = authenticate(_UID, address, keyAccess);
Serial.print("\n");
if ( state == 0) {
Serial.println("Authentication block OK");
time = millis();//prints time since program started
Serial.print("Time:");
Serial.print(time);
Serial.print(" ");
Serial.write("ms");
} else {
Serial.println("Authentication failed");
}
/////////////////////////////////////////////////////////////
//Read from address after authentication
state = readData(address, aux);
Serial.print("\n");
if (state == 0) {
Serial.println("Read block OK");
} else {
Serial.println("Read failed");
}
Serial.print("\n");
Serial.print("Data readed : ");
print(aux , 16);
Serial.print("\n");
time = millis();//prints time since program started
Serial.print("Time:");
Serial.print(time);
Serial.print(" ");
Serial.write("ms");
delay(2000);
}
//**********************************************************************
//!The goal of this command is to detect as many targets (maximum MaxTg)
// as possible in passive mode.
uint8_t init(uint8_t *UID , uint8_t *ATQ) //! Request InListPassive
{
Serial.flush();
dataTX[0] = 0x04; // Length
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4;
dataTX[3] = 0x4A; // Code
dataTX[4] = 0x01; //MaxTarget
dataTX[5] = 0x00; //BaudRate = 106Kbps
dataTX[6] = 0x00; // Clear checkSum position
checkSum(dataTX);
sendTX(dataTX , 7 ,23);
for (int i = 17; i < (21) ; i++){
_UID[i-17] = dataRX[i];
UID[i-17] = _UID[i-17];
}
ATQ[0] = dataRX[13];
ATQ[1] = dataRX[14];
if ((dataRX[9]== 0xD5) & (dataRX[10] == 0x4B) & (dataRX[11] == 0x01)) {
return 0;
} else {
return 1;
}
}
//**********************************************************************
//!A block must be authenticated before read and write operations
uint8_t authenticate(uint8_t *UID, uint8_t blockAddress, uint8_t *keyAccess)
{
dataTX[0] = 0x0F;
lengthCheckSum(dataTX);
dataTX[2] = 0xD4;
dataTX[3] = 0x40; // inDataEchange
dataTX[4] = 0x01; //Number of targets
dataTX[5] = 0x60; // Authentication code
dataTX[6] = blockAddress;
for (int i = 0; i < 6 ; i++) {
dataTX[i + 7] = keyAccess[i];
}
dataTX[13] = UID[0]; dataTX[14] = UID[1];
dataTX[15] = UID[2]; dataTX[16] = UID[3];
dataTX[17] = 0x00;
checkSum(dataTX);
sendTX(dataTX , 18 ,14);
if ((dataRX[9]== 0xD5) & (dataRX[10] == 0x41) & (dataRX[11] == 0x00)) {
return 0;
} else {
return 1;
}
}
//**********************************************************************
//!Write 16 bytes in address .
uint8_t writeData(uint8_t address, uint8_t *blockData) //!Writing
{
Serial.print(" ");
dataTX[0] = 0x15;
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4;
dataTX[3] = 0x40;//inDataEchange CODE
dataTX[4] = 0x01;//Number of targets
dataTX[5] = 0xA0;//Write Command
dataTX[6] = address; //Address
for (int i = 0; i < 16; i++) {
dataTX[i+7] = blockData[i];
}
dataTX[23] = 0x00;
checkSum(dataTX);
sendTX(dataTX , 24 ,14);
if ((dataRX[9]== 0xD5) & (dataRX[10] == 0x41) & (dataRX[11] == 0x00)) {
return 0;
} else {
return 1;
}
}
//**********************************************************************
//!Read 16 bytes from address .
uint8_t readData(uint8_t address, uint8_t *readData) //!Reading
{
Serial.print(" ");
dataTX[0] = 0x05;
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4; // Code
dataTX[3] = 0x40; // Code
dataTX[4] = 0x01; // Number of targets
dataTX[5] = 0x30; //ReadCode
dataTX[6] = address; //Read address
dataTX[7] = 0x00;
checkSum(dataTX);
sendTX(dataTX , 8, 30);
memset(readData, 0x00, 16);
if ((dataRX[9]== 0xD5) & (dataRX[10] == 0x41) & (dataRX[11] == 0x00)) {
for (int i = 12; i < 28; i++) {
readData[i-12] = dataRX[i];
}
return 0;
} else {
return 1;
}
}
//**********************************************************************
//!The PN532 sends back the version of the embedded firmware.
bool getFirmware(void) //! It is needed to launch a simple command to sycnchronize
{
Serial.print(" ");
memset(dataTX, 0x00, 35);
dataTX[0] = 0x02; // Length
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4; // CODE
dataTX[3] = 0x02; //TFI
checkSum(dataTX); //0x2A; //Checksum
sendTX(dataTX , 5 , 17);
Serial.print("\n");
Serial.print("Your Firmware version is : ");
for (int i = 11; i < (15) ; i++){
Serial.print(dataRX[i], HEX);
Serial.print(" ");
}
Serial.print("\n");
}
//**********************************************************************
//!Print data stored in vectors .
void print(uint8_t * _data, uint8_t length)
{
for (int i = 0; i < length ; i++){
Serial.print(_data[i], HEX);
Serial.print(" ");
}
Serial.print("\n");
}
//**********************************************************************
//!This command is used to set internal parameters of the PN532,
bool configureSAM(void)//! Configure the SAM
{
Serial.print(" ");
dataTX[0] = 0x05; //Length
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4;
dataTX[3] = 0x14;
dataTX[4] = 0x01; // Normal mode
dataTX[5] = 0x14; // TimeOUT
dataTX[6] = 0x00; // IRQ
dataTX[7] = 0x00; // Clean checkSum position
checkSum(dataTX);
sendTX(dataTX , 8, 13);
}
//**********************************************************************
//!Send data stored in dataTX
void sendTX(uint8_t *dataTX, uint8_t length, uint8_t outLength)
{
Serial.print(char(0x00));
Serial.print(char(0x00));
Serial.print(char(0xFF));
for (int i = 0; i < length; i++) {
Serial.print(char(dataTX[i]));
}
Serial.print(char(0x00));
getACK();
waitResponse();// Receive response
getData(outLength);
}
//**********************************************************************
//!Wait for ACK response and stores it in the dataRX buffer
void getACK(void)
{
delay(5);
waitResponse();
for (int i = 0; i < 5 ; i++) {
dataRX[i] = Serial.read();
}
}
//**********************************************************************
//!Wait the response of the module
void waitResponse(void)
{
int val = 0xFF;
int cont = 0x00;
while(val != 0x00) { //Wait for 0x00 response
val = Serial.read();
delay(5);
cont ++;
}
}
//**********************************************************************
//!Get data from the module
void getData(uint8_t outLength)
{
for (int i=5; i < outLength; i++) {
dataRX[i] = Serial.read();//read data from the module.
}
}
//**********************************************************************
//!Calculates the checksum and stores it in dataTX buffer
void checkSum(uint8_t *dataTX)
{
for (int i = 0; i < dataTX[0] ; i++) {
dataTX[dataTX[0] + 2] += dataTX[i + 2];
}
byte(dataTX[dataTX[0] + 2]= - dataTX[dataTX[0] + 2]);
}
//**********************************************************************
//!Calculates the length checksum and sotres it in the buffer.
uint8_t lengthCheckSum(uint8_t *dataTX)
{
dataTX[1] = byte(0x100 - dataTX[0]);
}
ok, try this
/*
* RFID/NFC Modul for Arduino
* Read a block
*/
uint8_t dataRX[35];//Receive buffer.
uint8_t dataTX[35];//Transmit buffer.
uint8_t _UID[4];// stores the UID (unique identifier) of a card.
uint8_t keyAccess[] = { 0xFF, 0xFF, 0xFF, 0xFF, 0xFF, 0xFF };// stores the key or password.
uint8_t address = 0x04;//Address to read.
uint8_t ATQ[2];//Answer to request
uint8_t state;//state of the process
uint8_t aux[16];//Auxiliar buffer.
unsigned long time;
unsigned long loop_time; // less the 2 second delay... dont forget
unsigned long function_time;
void setup()
{
//Start serial port 115200 bps:
Serial.begin(115200);
delay(100);
Serial.println("RFID/NFC @ 13.56 MHz module started");
delay(1000);
//!It is needed to launch a simple command to sycnchronize
getFirmware();
configureSAM();
}
void loop()
{
Serial.print("\nReady to read..."); // optimise the prints by putting the new lines in the same print as the actual print
loop_time = 0; // reset the loop timer
/////////////////////////////////////////////////////////////
//Get the UID Identifier
function_time = millis(); // we already had a one second delay in setup that is not part of the timeing so lets start with a clean count
init(_UID, ATQ);
time = millis() - function_time; //prints time to get the UID
loop_time += time;
Serial.print("\nThe UID : ");
print(_UID, 4);
Serial.print("Time:");
Serial.print(time);
Serial.println(" ms"); // dont need the space and the ms on seperate prints, just do it in one, also by using println you get the new line at the end automatically
////////////////////////////////////////////////////////////
//Auntenticate a block with his keyAccess
function_time = millis();
state = authenticate(_UID, address, keyAccess);
time = millis() - function_time;//time the call
loop_time += time; // add this call to the overall time
Serial.print("\n");
if (state == 0) {
Serial.println("Authentication block OK");
Serial.print("Time:");
Serial.print(time);
Serial.println(" ms");
}
else {
Serial.println("Authentication failed");
}
/////////////////////////////////////////////////////////////
//Read from address after authentication
function_time = millis();
state = readData(address, aux);
time = millis() - function_time; // time the call
loop_time += time; // add this call to the overall time
Serial.print("\n");
if (state == 0) {
Serial.println("Read block OK");
}
else {
Serial.println("Read failed");
}
Serial.print("\nData readed : ");
print(aux, 16);
Serial.print("\nTime:");
Serial.print(time);
Serial.println(" ms");
Serial.print("\nTotal call time : ");
Serial.print(loop_time);
Serial.println(" ms");
delay(2000); // wait 2 seconds before we loop again
}
//**********************************************************************
//!The goal of this command is to detect as many targets (maximum MaxTg)
// as possible in passive mode.
uint8_t init(uint8_t *UID, uint8_t *ATQ) //! Request InListPassive
{
Serial.flush();
dataTX[0] = 0x04; // Length
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4;
dataTX[3] = 0x4A; // Code
dataTX[4] = 0x01; //MaxTarget
dataTX[5] = 0x00; //BaudRate = 106Kbps
dataTX[6] = 0x00; // Clear checkSum position
checkSum(dataTX);
sendTX(dataTX, 7, 23);
for (int i = 17; i < (21); i++) {
_UID[i - 17] = dataRX[i];
UID[i - 17] = _UID[i - 17];
}
ATQ[0] = dataRX[13];
ATQ[1] = dataRX[14];
if ((dataRX[9] == 0xD5) & (dataRX[10] == 0x4B) & (dataRX[11] == 0x01)) {
return 0;
}
else {
return 1;
}
}
//**********************************************************************
//!A block must be authenticated before read and write operations
uint8_t authenticate(uint8_t *UID, uint8_t blockAddress, uint8_t *keyAccess)
{
dataTX[0] = 0x0F;
lengthCheckSum(dataTX);
dataTX[2] = 0xD4;
dataTX[3] = 0x40; // inDataEchange
dataTX[4] = 0x01; //Number of targets
dataTX[5] = 0x60; // Authentication code
dataTX[6] = blockAddress;
for (int i = 0; i < 6; i++) {
dataTX[i + 7] = keyAccess[i];
}
dataTX[13] = UID[0]; dataTX[14] = UID[1];
dataTX[15] = UID[2]; dataTX[16] = UID[3];
dataTX[17] = 0x00;
checkSum(dataTX);
sendTX(dataTX, 18, 14);
if ((dataRX[9] == 0xD5) & (dataRX[10] == 0x41) & (dataRX[11] == 0x00)) {
return 0;
}
else {
return 1;
}
}
//**********************************************************************
//!Write 16 bytes in address .
uint8_t writeData(uint8_t address, uint8_t *blockData) //!Writing
{
Serial.print(" ");
dataTX[0] = 0x15;
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4;
dataTX[3] = 0x40;//inDataEchange CODE
dataTX[4] = 0x01;//Number of targets
dataTX[5] = 0xA0;//Write Command
dataTX[6] = address; //Address
for (int i = 0; i < 16; i++) {
dataTX[i + 7] = blockData[i];
}
dataTX[23] = 0x00;
checkSum(dataTX);
sendTX(dataTX, 24, 14);
if ((dataRX[9] == 0xD5) & (dataRX[10] == 0x41) & (dataRX[11] == 0x00)) {
return 0;
}
else {
return 1;
}
}
//**********************************************************************
//!Read 16 bytes from address .
uint8_t readData(uint8_t address, uint8_t *readData) //!Reading
{
Serial.print(" ");
dataTX[0] = 0x05;
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4; // Code
dataTX[3] = 0x40; // Code
dataTX[4] = 0x01; // Number of targets
dataTX[5] = 0x30; //ReadCode
dataTX[6] = address; //Read address
dataTX[7] = 0x00;
checkSum(dataTX);
sendTX(dataTX, 8, 30);
memset(readData, 0x00, 16);
if ((dataRX[9] == 0xD5) & (dataRX[10] == 0x41) & (dataRX[11] == 0x00)) {
for (int i = 12; i < 28; i++) {
readData[i - 12] = dataRX[i];
}
return 0;
}
else {
return 1;
}
}
//**********************************************************************
//!The PN532 sends back the version of the embedded firmware.
bool getFirmware(void) //! It is needed to launch a simple command to sycnchronize
{
Serial.print(" ");
memset(dataTX, 0x00, 35);
dataTX[0] = 0x02; // Length
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4; // CODE
dataTX[3] = 0x02; //TFI
checkSum(dataTX); //0x2A; //Checksum
sendTX(dataTX, 5, 17);
Serial.print("Your Firmware version is : ");
for (int i = 11; i < (15); i++) {
Serial.print(dataRX[i], HEX);
Serial.print(" ");
}
Serial.print("\n");
}
//**********************************************************************
//!Print data stored in vectors .
void print(uint8_t * _data, uint8_t length)
{
for (int i = 0; i < length; i++) {
Serial.print(_data[i], HEX);
Serial.print(" ");
}
Serial.print("\n");
}
//**********************************************************************
//!This command is used to set internal parameters of the PN532,
bool configureSAM(void)//! Configure the SAM
{
Serial.print(" ");
dataTX[0] = 0x05; //Length
lengthCheckSum(dataTX); // Length Checksum
dataTX[2] = 0xD4;
dataTX[3] = 0x14;
dataTX[4] = 0x01; // Normal mode
dataTX[5] = 0x14; // TimeOUT
dataTX[6] = 0x00; // IRQ
dataTX[7] = 0x00; // Clean checkSum position
checkSum(dataTX);
sendTX(dataTX, 8, 13);
}
//**********************************************************************
//!Send data stored in dataTX
void sendTX(uint8_t *dataTX, uint8_t length, uint8_t outLength)
{
Serial.print(char(0x00));
Serial.print(char(0x00));
Serial.print(char(0xFF));
for (int i = 0; i < length; i++) {
Serial.print(char(dataTX[i]));
}
Serial.print(char(0x00));
getACK();
waitResponse();// Receive response
getData(outLength);
}
//**********************************************************************
//!Wait for ACK response and stores it in the dataRX buffer
void getACK(void)
{
delay(5);
waitResponse();
for (int i = 0; i < 5; i++) {
dataRX[i] = Serial.read();
}
}
//**********************************************************************
//!Wait the response of the module
void waitResponse(void)
{
int val = 0xFF;
int cont = 0x00;
while (val != 0x00) { //Wait for 0x00 response
val = Serial.read();
delay(5);
cont++;
}
}
//**********************************************************************
//!Get data from the module
void getData(uint8_t outLength)
{
for (int i = 5; i < outLength; i++) {
dataRX[i] = Serial.read();//read data from the module.
}
}
//**********************************************************************
//!Calculates the checksum and stores it in dataTX buffer
void checkSum(uint8_t *dataTX)
{
for (int i = 0; i < dataTX[0]; i++) {
dataTX[dataTX[0] + 2] += dataTX[i + 2];
}
byte(dataTX[dataTX[0] + 2] = -dataTX[dataTX[0] + 2]);
}
//**********************************************************************
//!Calculates the length checksum and sotres it in the buffer.
uint8_t lengthCheckSum(uint8_t *dataTX)
{
dataTX[1] = byte(0x100 - dataTX[0]);
}
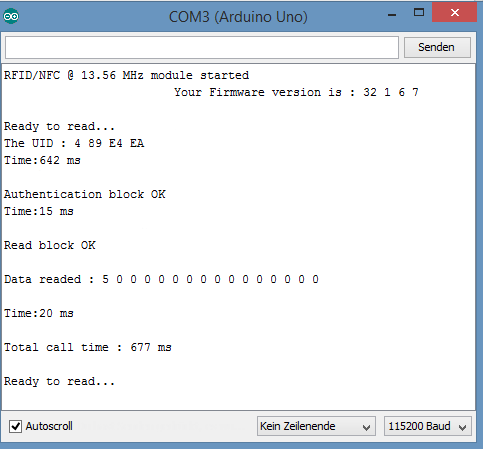
I took out some redundent print statements (Or not necessary as they can be optimised into single line), I hope this did not break the code
The main mistake you where doing is this
the main loop has a 2 second delay in it, you where not eliminating this from your timeing, second you had a one second delay in startup, this was also included in your time, then you also had all the print statements to the screen (Console) also included in your time
What I did and the main change in your code is introduce a seperate timer value "function_time" that is set to millis() just before a call to read the chips, then I subtract it from the new mills() once done, this tells us how long the function call actually took. The "loop_time" simply adds up all the funcrtion_time values to see what the total is without having to keep track with a calculator after a run
Hope this helps
It seems better
Thanks for reply.
Rita
good, that first one still seems a little slow but that may be its nature
Glad it helped
Peter
Hi Peter ,
is the first Time just to get the UID?
what reason can I give, that's the time so long is for UID ?
Regards ,
Rita

See http://electronics.howstuffworks.com/near-field-communication.htm . This explains some of what NFC does. To protect the transmission, a handshake is made to verify and encrypt later transmissions that will be made resulting in a UID. I can write a book here, but just say encryption is not cheap to set up both in processor and communication.
Clem
See http://electronics.howstuffworks.com/near-field-communication.htm . This explains some of what NFC does. To protect the transmission, a handshake is made to verify and encrypt later transmissions that will be made resulting in a UID. I can write a book here, but just say encryption is not cheap to set up both in processor and communication.
Clem