Hi everybody,
I'm currently trying to implement the CAN Controller from the PS into a design of mine.
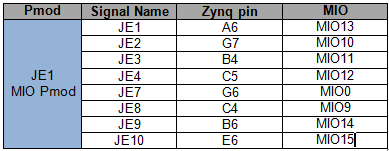
The frist step was just to activate the CAN0 in the XPS and then making the synthesis work in Plan Ahead. I read in the Hardware User Guide, that the Pmod JE has hardwired connections to specific MIO-pins. Is that correct?
For instance, if I select MIO_14 and 15 for CAN_Rx and CAN_Tx, the signals would already be at the respective Pmod connection.
I tested the CAN Controller with the example codes and it all works fine when the Controller is in loopback mode. However, once I change the mode to normal and want to manually loopback Tx to Rx, it doesn't work anymore.
Can somebody give me a quick tutorial on how to implement the CAN Controller, just to rule out any design problems? Initially I thought that if the loopback modes work, the implementation is fine but now I'm not so sure anymore. Or does the CAN Controller need any specific hardware on the Zedboard? I have an external transceiver but since I don't even get the Tx signal out of the board, I'm pretty sure that that is not the problem.
Regards