


Hello Everyone,
I would like to use the BeagleBone Blue as the flight controller of my quadcopter drone and run ardupilotblue.
https://github.com/mirkix/ardupilotblue

The Brushless Motor Speed Control that I am using is the Racestar 20A 4in1 ESC mentioned in this parts list.
https://www.hackster.io/jkridner/beaglebone-blue-220mm-quadcopter-9801d8

I've been following guidance of these links and this tutorial but I've run into a few issues with construction.
https://github.com/imfatant/test
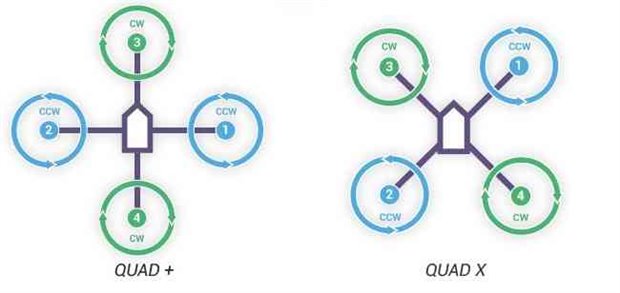
First question, Is this Propeller Layout correct in this photo?
The orange props are the front/nose of the drone and black props at the rear.
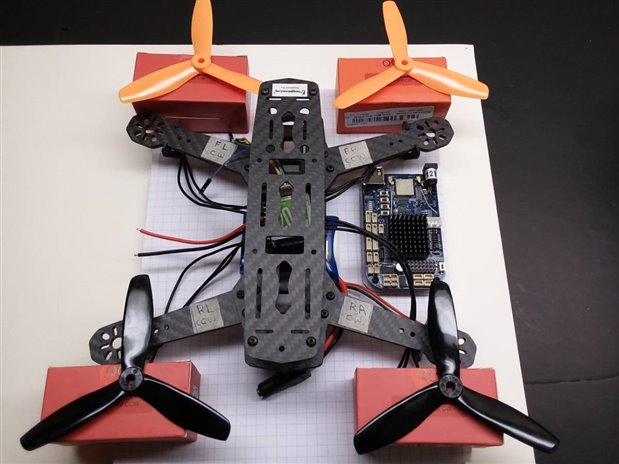
The orange props have leading edge facing inwards and with the black props the trailing edge is facing inwards to the body.
My terminology and setup might be completely incorrect. For safety reasons the first test will be performed without the propellers attached.
In which direction should the ESC be oriented on the the chassis?
And Is the label side of ESC board meant to face upwards with the plug facing front of the drone?
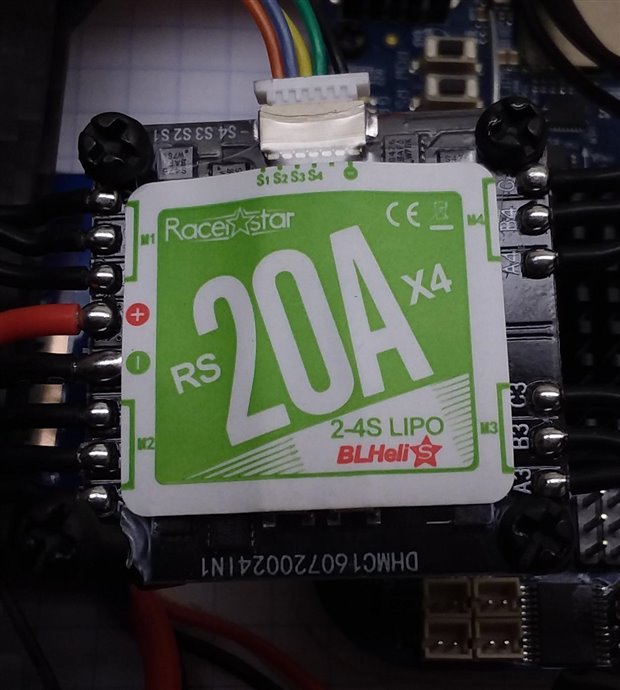
Also, Which pins from the esc should be connected to the BeagleBone Blue?

I would like to mount the ESC to the bottom of the drone as shown in the photo below.
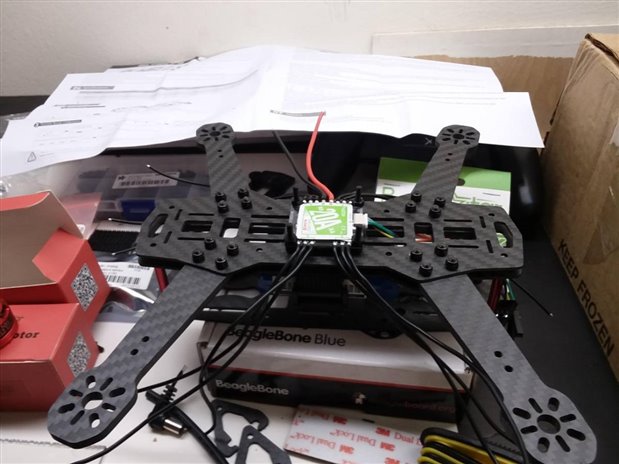
I'm unsure if the ESC should be facing label side upward and which direction the control wiring plug should be facing in orientation to the front of the drone.
The Lipo Battery will be located in the center of frame.

There will be a small First Person View Camera and transmitter in the nose with 5V power supplied from the BB Blue.
The BeagleBone Blue will be secured to the top deck with the onboard IMU chip at dead center.
I am waiting for the FPV Cam/Transmitter and Ublox M8N GPS to arrive tomorrow.
When complete this BB Blue Drone will be running ArduPilotBlue and will be carrying a GoPro Hero 5 Session on flights.
Thanks for your time reading this post and for any help.
Trent


