


Motion sensors
Fundamentals
Motion sensors play a crucial role in modern technology, enabling a wide range of applications across various industries. These sensors are designed to measure and detect changes in motion, providing essential data for navigation, orientation, and control systems. The primary types of motion sensors include accelerometers and gyroscopes, which collectively contribute to a device's ability to understand and respond to changes in its position and movement. Accelerometers, designed to gauge changes in linear acceleration, empower devices to discern movements, vibrations, and tilts along multiple axes. They are typically based on microelectromechanical systems (MEMS) technology, utilizing tiny, suspended structures that move in response to acceleration forces. On the other hand, gyroscopes focus on measuring angular velocity, providing insights into an object's rotational motion. MEMS-based gyroscopes use the Coriolis effect, where a vibrating structure experiences a force perpendicular to its motion when the device rotates. When combined, these sensors form a powerful duo capable of delivering comprehensive data on linear motion in threes axes and rotational movements along three axes, commonly referred to as six degrees of freedom (6-DOF). They are also referred to as 6-axis IMU (Inertial Measurement Unit). Integration of a 3-axis Magnetometer into the combination of 3-axis Accelerometer and 3-axis Gyroscope result in a 9-axis IMU. Our product portfolio offers 3-axis Accelerometer and 6-axis IMU (Accelerometer + Gyroscope).
Working principle of a MEMS Acceleration Sensor
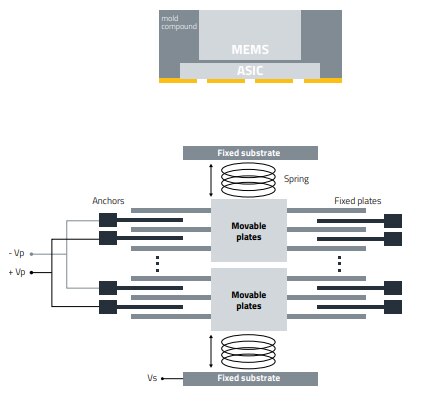
The sensor is a MEMS based capacitive acceleration sensor with an integrated ASIC. The acceleration sensors production approach is the creation of finger structures. One side is fixed, the other side is flexibly suspended. The sensor measures the acceleration or vibration through MEMS capacitive sensing principle. If this system gets accelerated, the distance changes between the fixed and movable structure. This change in distance causes a change in the electrical capacitance (capacitor principle), which could be measured electrically and serves as a reference value for acceleration.
Working principle of MEMS Gyroscope
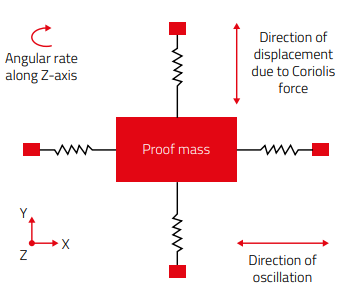
The MEMS Gyroscope consists of a suspended proof mass, a driving system to oscillate the proof mass, and a sensing system. An angular rotation along one axis will result in a Coriolis force along another axis. The Coriolis force (F) causes a displacement, and it is proportional to the angular rotation on the original axis. Displacement is calculated by measuring the change in capacitance. For example, an angular rotation along the Z-axis causes Coriolis force on the Y-axis resulting in a displacement of the proof mass and a change in capacitance. The capacitive sensing interface detects this displacement. A tuning fork configuration is used in our MEMS gyroscopes to make the sensor’s operation independent of linear accelerations.
If you want to read more find here the whole Product Guide.