










With the help of the latest technology, it is now possible to reduce the delay in response required to provide help and support to an emergency scenario such as a disaster, calamity or incident. It drastically reduces the amount of workforce required for carrying out highly sophisticated tasks. An emergency response terrain vehicle has been developed for this purpose which can be controlled and monitored manually.
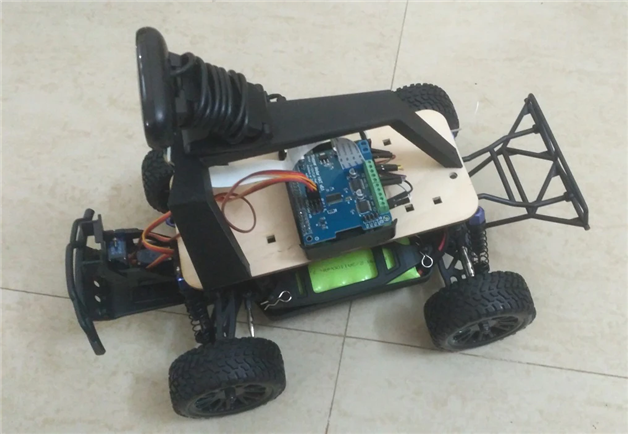
The rover is a terrain miniature vehicle capable of traversing either manually or autonomously (in future). This vehicle can be any typical RC ground vehicle, preferably with a brushed DC motor, controlled by an ESC. The best example of this type is a Donkey Car. The advantage of donkey car is that it comes with autonomous capability via Raspberry Pi 3 and this is achieved by training the car. For setting up the car, training and producing a trained model, please refer to this exclusive official guide at the Donkey car website. Two prototypes where developed. The first prototype used a Rock Crawler RC Car kit and the second prototype used a Donkey Car Kit (HSP 94186 Brushed RC Car).
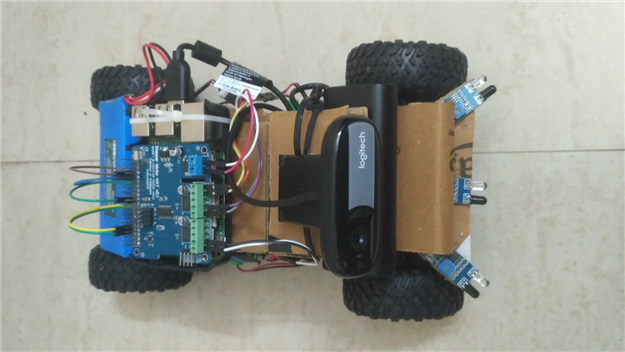
The PCA9685 PWM driver that comes with the donkey car kit is capable enough to drive all the servos and motors that come with it. But in case if you plan to attach more sensors or actuators, I would suggest you use a Raspberry Shield. U-Blox NEO-6M GPS (link) is attached which gives the local position of the car. The interfacing of GPS with Raspberry Pi 3 is via serial communication. GPS and compass based autonomous navigation will be later integrated. We attached a couple of more sensors like HD camera for image processing and IR, SONAR for obstacle avoidance. Driving multiple SONAR is tedious than IR. Therefore IR is recommended in the short run. A separate power supply unit must be provided for Raspberry Pi and the motor assembly. This is to avoid the motor noise getting into the power supply, which may cause instability. Still, both should have a common ground. A python program is developed to give custom commands to the ground vehicle. This program is run on the onboard raspberry pi and controls the vehicle using the motor drivers. It also has the provision to control a pan-tilt servo system where the camera can be mounted.
Manual control of ARORA is implemented using a custom-developed mobile application. It also provides live camera feed from the on-board HD camera. This app allows manual control and autonomous monitoring of the ground vehicle. Manual control is performed via a virtual joystick implemented in the app and automatic operation is using obstacle avoidance by the manipulation of various onboard IR sensors via the python program.
Prototype 1:
Prototype 2:
Top Comments