











|
FreeRTOS Symmetric Multiprocessing (SMP) is a recent version of the RTOS that can schedule tasks across multiple controller cores. It's currently in test phase, and they have a version for the RP2040. In this blog post, I set up my own little SMP project in VSCode. The only thing it does is build, run and debug. No functionality, but a good start for future projects |

Set up a project folder in VSCode
If you've been following this series, you have VSCode set up, have the pico-examples and FreeRTOS demos in your workspace, and are able to build and debug all examples and demos. Now let's see how to add a fresh SMP project to the workspace.
Initial task: set the location of the FreeRTOS kernel sources
The FreeRTOS demos know where the library sources and includes are, because they come as one package with a fixed directory structure. Our sources will reside in a different directory, so we have to tell where the kernel sources are. This is done via File -> Preferences -> Settings -> Extensions -> CMake Tools -> cmake.environment -> Add Item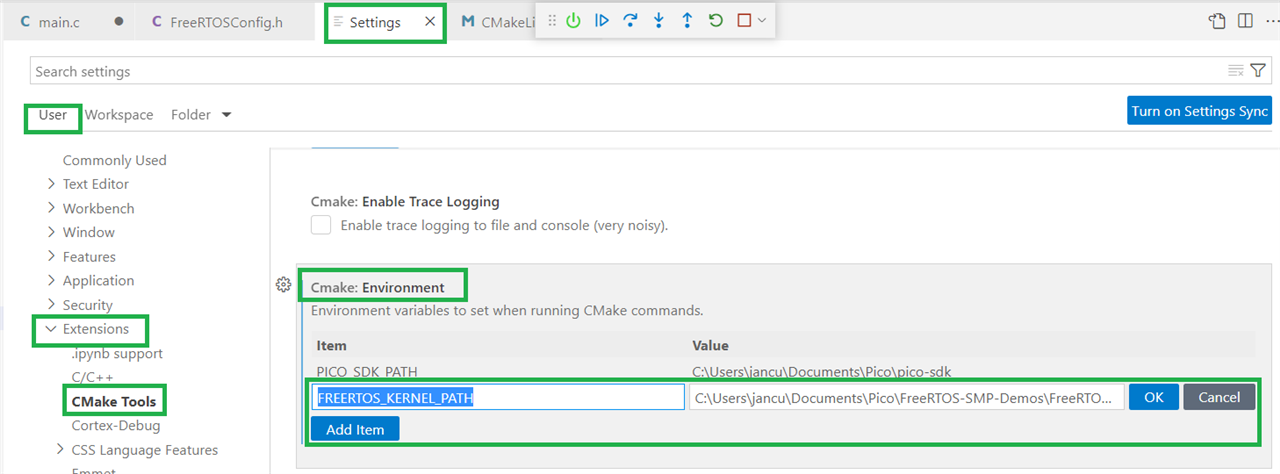
item: FREERTOS_KERNEL_PATH
value: location of the source folder, where you installed the FreeRTOS SMP demo (in my case: C:\Users\jancu\Documents\Pico\FreeRTOS-SMP-Demos\FreeRTOS\Source)
Add a project folder to your workspace and prepare it
We need a location to store sources and scripts. This can be any directory in your file system. You add it via File -> Add folder to workspace.
Once done, copy the .vscode of one of your previous folders into the new folder. This takes care that we have a launch and debug configuration.
copy FreeRTOS_Kernel_import.cmake and pico_sdk_import.cmake from the SMP demo
Create a file called CMakeLists.txt
cmake_minimum_required(VERSION 3.13)
# Pull in SDK (must be before project)
include(pico_sdk_import.cmake)
# Pull in FreeRTOS
include(FreeRTOS_Kernel_import.cmake)
project(project0 C CXX ASM)
set(CMAKE_C_STANDARD 11)
set(CMAKE_CXX_STANDARD 17)
pico_sdk_init()
add_executable(project0
source/main.c
)
target_include_directories(project0 PRIVATE
${CMAKE_CURRENT_LIST_DIR}
${CMAKE_CURRENT_LIST_DIR}/source
)
target_link_libraries(project0 pico_stdlib FreeRTOS-Kernel FreeRTOS-Kernel-Heap1)
pico_add_extra_outputs(project0)
ignore errors in the console. VSCode tries to prepare the project but we're not ready yet.
Create a subfolder for the source (I called it source).
In that folder, create a file called FreeRTOSConfig.h
/*
* FreeRTOS V202107.00
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*
* http://www.FreeRTOS.org
* http://aws.amazon.com/freertos
*
* 1 tab == 4 spaces!
*/
#ifndef FREERTOS_CONFIG_H
#define FREERTOS_CONFIG_H
/*-----------------------------------------------------------
* Application specific definitions.
*
* These definitions should be adjusted for your particular hardware and
* application requirements.
*
* THESE PARAMETERS ARE DESCRIBED WITHIN THE 'CONFIGURATION' SECTION OF THE
* FreeRTOS API DOCUMENTATION AVAILABLE ON THE FreeRTOS.org WEB SITE.
*
* See http://www.freertos.org/a00110.html
*----------------------------------------------------------*/
/* Scheduler Related */
#define configUSE_PREEMPTION 1
#define configUSE_TICKLESS_IDLE 0
#define configUSE_IDLE_HOOK 0
//#define configUSE_TICK_HOOK 1
#define configUSE_TICK_HOOK 0
#define configTICK_RATE_HZ ( ( TickType_t ) 1000 )
#define configMAX_PRIORITIES 32
#define configMINIMAL_STACK_SIZE ( configSTACK_DEPTH_TYPE ) 256
#define configUSE_16_BIT_TICKS 0
#define configIDLE_SHOULD_YIELD 1
/* Synchronization Related */
#define configUSE_MUTEXES 1
#define configUSE_RECURSIVE_MUTEXES 1
#define configUSE_APPLICATION_TASK_TAG 0
#define configUSE_COUNTING_SEMAPHORES 1
#define configQUEUE_REGISTRY_SIZE 8
#define configUSE_QUEUE_SETS 1
#define configUSE_TIME_SLICING 1
#define configUSE_NEWLIB_REENTRANT 0
#define configENABLE_BACKWARD_COMPATIBILITY 0
#define configNUM_THREAD_LOCAL_STORAGE_POINTERS 5
/* System */
#define configSTACK_DEPTH_TYPE uint32_t
#define configMESSAGE_BUFFER_LENGTH_TYPE size_t
/* Memory allocation related definitions. */
#define configSUPPORT_STATIC_ALLOCATION 0
#define configSUPPORT_DYNAMIC_ALLOCATION 1
#define configTOTAL_HEAP_SIZE (128*1024)
#define configAPPLICATION_ALLOCATED_HEAP 0
/* Hook function related definitions. */
#define configCHECK_FOR_STACK_OVERFLOW 2
#define configUSE_MALLOC_FAILED_HOOK 1
#define configUSE_DAEMON_TASK_STARTUP_HOOK 0
/* Run time and task stats gathering related definitions. */
#define configGENERATE_RUN_TIME_STATS 0
#define configUSE_TRACE_FACILITY 1
#define configUSE_STATS_FORMATTING_FUNCTIONS 0
/* Co-routine related definitions. */
#define configUSE_CO_ROUTINES 0
#define configMAX_CO_ROUTINE_PRIORITIES 1
/* Software timer related definitions. */
#define configUSE_TIMERS 1
#define configTIMER_TASK_PRIORITY ( configMAX_PRIORITIES - 1 )
#define configTIMER_QUEUE_LENGTH 10
#define configTIMER_TASK_STACK_DEPTH 1024
/* Interrupt nesting behaviour configuration. */
/*
#define configKERNEL_INTERRUPT_PRIORITY [dependent of processor]
#define configMAX_SYSCALL_INTERRUPT_PRIORITY [dependent on processor and application]
#define configMAX_API_CALL_INTERRUPT_PRIORITY [dependent on processor and application]
*/
/* SMP port only */
#define configNUM_CORES 2
#define configTICK_CORE 0
#define configRUN_MULTIPLE_PRIORITIES 1
/* RP2040 specific */
#define configSUPPORT_PICO_SYNC_INTEROP 1
#define configSUPPORT_PICO_TIME_INTEROP 1
#include <assert.h>
/* Define to trap errors during development. */
#define configASSERT(x) assert(x)
/* Set the following definitions to 1 to include the API function, or zero
to exclude the API function. */
#define INCLUDE_vTaskPrioritySet 1
#define INCLUDE_uxTaskPriorityGet 1
#define INCLUDE_vTaskDelete 1
#define INCLUDE_vTaskSuspend 1
#define INCLUDE_vTaskDelayUntil 1
#define INCLUDE_vTaskDelay 1
#define INCLUDE_xTaskGetSchedulerState 1
#define INCLUDE_xTaskGetCurrentTaskHandle 1
#define INCLUDE_uxTaskGetStackHighWaterMark 1
#define INCLUDE_xTaskGetIdleTaskHandle 1
#define INCLUDE_eTaskGetState 1
#define INCLUDE_xTimerPendFunctionCall 1
#define INCLUDE_xTaskAbortDelay 1
#define INCLUDE_xTaskGetHandle 1
#define INCLUDE_xTaskResumeFromISR 1
#define INCLUDE_xQueueGetMutexHolder 1
/* A header file that defines trace macro can be included here. */
#endif /* FREERTOS_CONFIG_H */
These are the FreeRTOS configuration settings. I've enabled the 2 cores, and that a task with lower priority can be active when scheduling a higher priority one.
In that folder, create a file called main.c
/*
* FreeRTOS V202107.00
* Copyright (C) 2020 Amazon.com, Inc. or its affiliates. All Rights Reserved.
*
* Permission is hereby granted, free of charge, to any person obtaining a copy of
* this software and associated documentation files (the "Software"), to deal in
* the Software without restriction, including without limitation the rights to
* use, copy, modify, merge, publish, distribute, sublicense, and/or sell copies of
* the Software, and to permit persons to whom the Software is furnished to do so,
* subject to the following conditions:
*
* The above copyright notice and this permission notice shall be included in all
* copies or substantial portions of the Software.
*
* THE SOFTWARE IS PROVIDED "AS IS", WITHOUT WARRANTY OF ANY KIND, EXPRESS OR
* IMPLIED, INCLUDING BUT NOT LIMITED TO THE WARRANTIES OF MERCHANTABILITY, FITNESS
* FOR A PARTICULAR PURPOSE AND NONINFRINGEMENT. IN NO EVENT SHALL THE AUTHORS OR
* COPYRIGHT HOLDERS BE LIABLE FOR ANY CLAIM, DAMAGES OR OTHER LIABILITY, WHETHER
* IN AN ACTION OF CONTRACT, TORT OR OTHERWISE, ARISING FROM, OUT OF OR IN
* CONNECTION WITH THE SOFTWARE OR THE USE OR OTHER DEALINGS IN THE SOFTWARE.
*
* http://www.FreeRTOS.org
* http://aws.amazon.com/freertos
*
* 1 tab == 4 spaces!
*/
/* Scheduler include files. */
#include "FreeRTOS.h"
#include "task.h"
#include "semphr.h"
/* Library includes. */
#include <stdio.h>
#include "pico/stdlib.h"
/*
* Configure the hardware as necessary to run this demo.
*/
static void prvSetupHardware( void );
int main( void )
{
/* Configure the hardware ready to run the demo. */
prvSetupHardware();
// TODO create tasks
/* Start the tasks and timer running. */
vTaskStartScheduler();
for (;;)
;
return 0;
}
/*-----------------------------------------------------------*/
static void prvSetupHardware( void )
{
stdio_init_all();
gpio_init(PICO_DEFAULT_LED_PIN);
gpio_set_dir(PICO_DEFAULT_LED_PIN, 1);
gpio_put(PICO_DEFAULT_LED_PIN, !PICO_DEFAULT_LED_PIN_INVERTED);
}
/*-----------------------------------------------------------*/
void vApplicationMallocFailedHook( void )
{
/* Called if a call to pvPortMalloc() fails because there is insufficient
free memory available in the FreeRTOS heap. pvPortMalloc() is called
internally by FreeRTOS API functions that create tasks, queues, software
timers, and semaphores. The size of the FreeRTOS heap is set by the
configTOTAL_HEAP_SIZE configuration constant in FreeRTOSConfig.h. */
/* Force an assert. */
configASSERT( ( volatile void * ) NULL );
}
/*-----------------------------------------------------------*/
void vApplicationStackOverflowHook( TaskHandle_t pxTask, char *pcTaskName )
{
( void ) pcTaskName;
( void ) pxTask;
/* Run time stack overflow checking is performed if
configCHECK_FOR_STACK_OVERFLOW is defined to 1 or 2. This hook
function is called if a stack overflow is detected. */
/* Force an assert. */
configASSERT( ( volatile void * ) NULL );
}
/*-----------------------------------------------------------*/
void vApplicationIdleHook( void )
{
volatile size_t xFreeHeapSpace;
/* This is just a trivial example of an idle hook. It is called on each
cycle of the idle task. It must *NOT* attempt to block. In this case the
idle task just queries the amount of FreeRTOS heap that remains. See the
memory management section on the http://www.FreeRTOS.org web site for memory
management options. If there is a lot of heap memory free then the
configTOTAL_HEAP_SIZE value in FreeRTOSConfig.h can be reduced to free up
RAM. */
xFreeHeapSpace = xPortGetFreeHeapSize();
/* Remove compiler warning about xFreeHeapSpace being set but never used. */
( void ) xFreeHeapSpace;
}
Now that all is ready, open CMakeLists.txt and save it. This will make VSCode initialise the build settings.
Run the project
On the bottom bar, select the launch setting, project folder, compile profile and tool chain
Now go to the Debug perspective, and start a session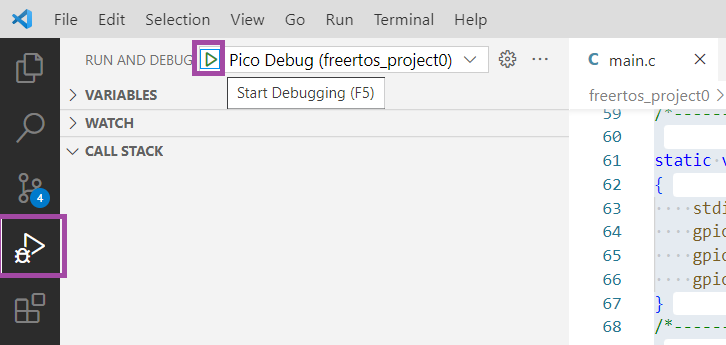
Even though the project doesn't contain tasks, it is a working, SMP ready example. Main things it does:
- initialise hardware (pico board sdk init, set up the LED pin)
- start the FreeRTOS scheduler
To make it run tasks, create some RTOS first, and register them between these lines of code in main():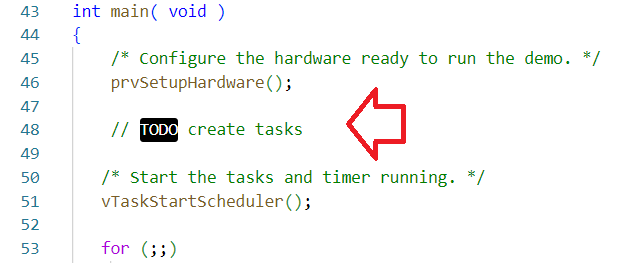
The FreeRTOS tutorial, and the demos from the SMP download, can give some ideas. I'll create a few in the next blog.
I attached a zip of my project0 to this post. Enjoy.
