


I'm reviewing the Microchip CAN Analyzer for a Road Test. I'm now testing it in a CAN Bus test bed that I designed.
|

In the previous posts for this review, I've used the digital side of the CAN circuit.
I always had the intention to also test the physical layer. I built CAN driver breakout boards for that.
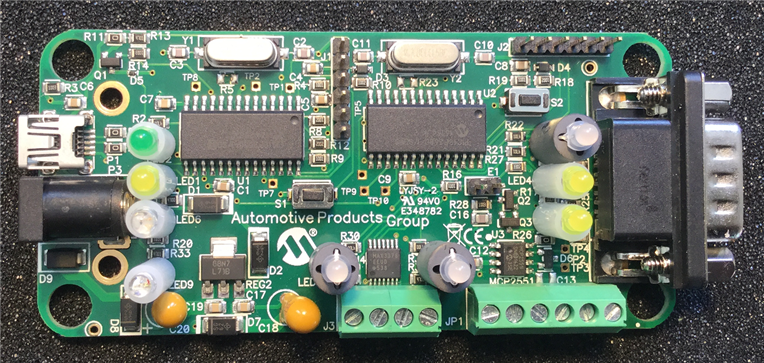
The Microchip CAN Bus AnalyzerMicrochip CAN Bus Analyzer supports both logic and physical side of the design.
You can plug it directly into a vehicle and check the traffic. There's an MCP2551 CAN driver on board.
It also allows you to check on the digital level (don't exceed 5 V) - valuable for firmware designers that don't need a CAN text fixture.
I've used that in all previous posts in this series.
But now, let's look at that physical layer.
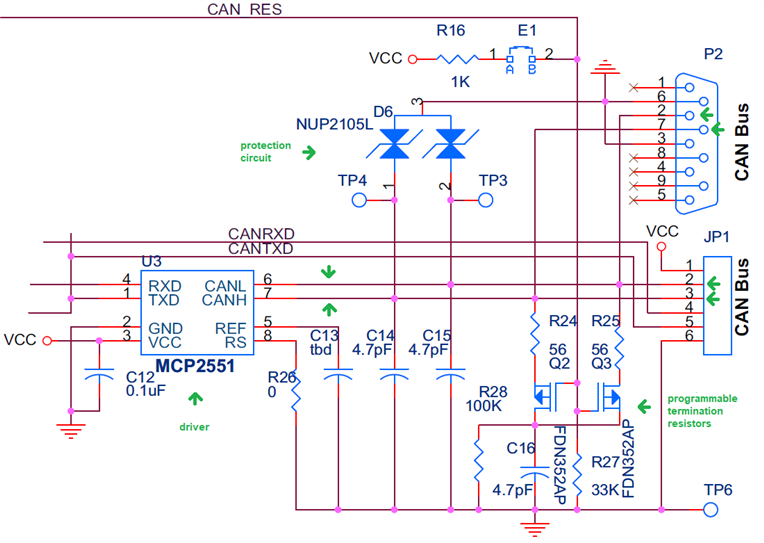
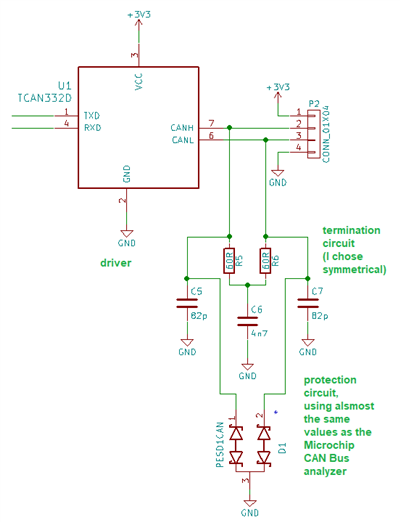
The CAN analyzer implements a protection circuit similar to what I did on the CAN breakout boards.
I use a different CAN driver, TI TCAND332D, but my circuit is virtually identical:
You can either use the DB9 connector or the screw terminal block to connect GND, CAN H and CAN L between the test circuit and the analyzer.
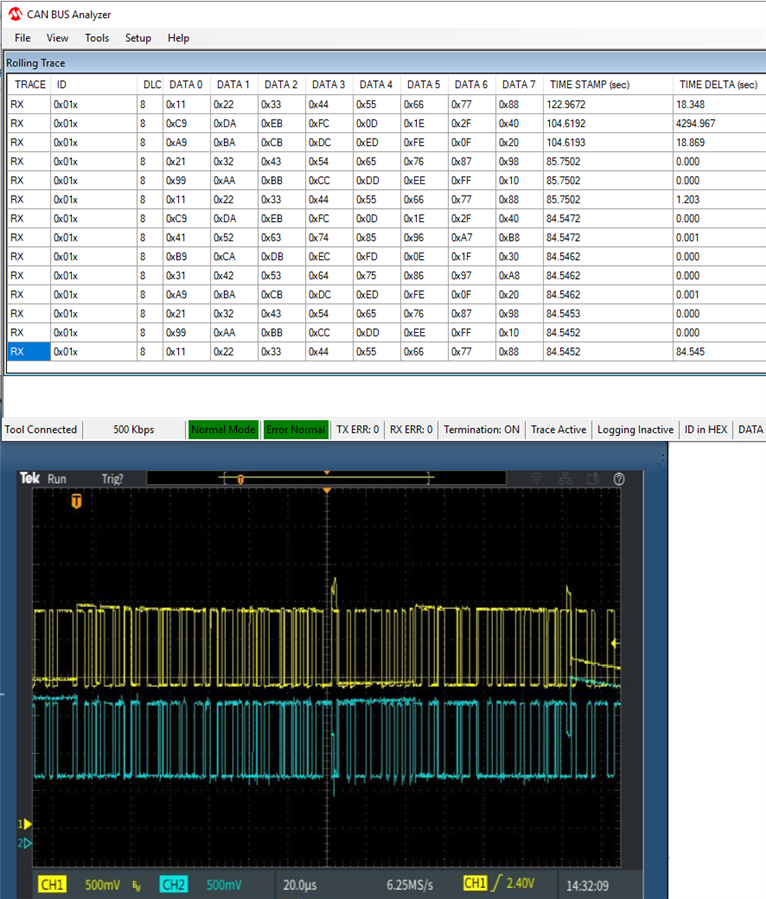
It's also interesting to attach an oscilloscope. Both H and L signals are referenced to ground, so you can put one channel to the H signal and the other to the L.
You'll see that both are positive signals, but inverted, around a midpoint that - in my case, is 1.85 V (see capture below)
The H signal will move between that midpoint and 2.8 V, the L between the midpoint and 0.9 V. So both have an amplitude of 0.95 V.
But they are opposite (differential) around that point.
The Microchip CAN Bus analyzer behaves exactly the same when probing the digital or physical layer.
That's of course a good thing. The protocol is identical on both sides.
And I knew the analyzer was up to the task, because mcb1 had already tested that.
Now that I have the mini CAN network here at home, the analyzer can help me in real world designs.
For more info about my review and the test bed development, check:
Top Comments