


Roadtesting the Rohde & Schwarz NGU401 SMU
This is the first post in a series that will cover my experience while roadtesting the Rohde & Schwarz NGU401 Source Measuring Unit (SMU) instrument. First, I would like to thank Rohde & Schwarz and Element14 for selecting me as one of the road testers for this instrument. I am exited and I look forward to exploring the capabilities and performance of the NGU401 SMU. I will start first with an overview of SMUs to bring the readers up to speed on what they expect to see in an SMU and then I will continue with various experiments and measurements using the NGU401 SMU.
Update #1:
A Short Tutorial on SMUs
What is an SMU
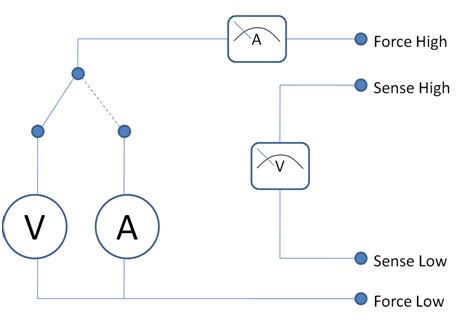
A source measurement unit (SMU) includes a sourcing function and measurement function. The source function can be voltage source or current source and the measurement function can be current or voltage. A simplified diagram of an SMU is shown in the figure below.
An SMU can function as voltage power supply, current source, a digital multimeter (DMM), or an electronic load.
Significant features of SMUs
SMUs are used for high precision voltage and current measurements. One of the common application of SMUs is to measure the I-V characteristics of semiconductor devices or materials. For example, an I-V characteristic of a diode is shown in the following figure.
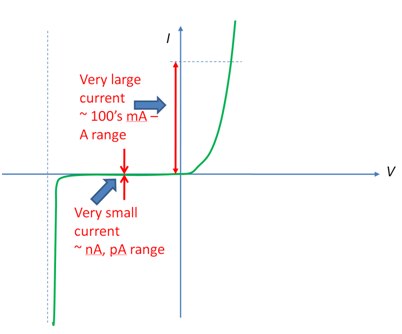
So for this case the SMU needs to be able to source and measure currents and voltages across positive and negative ranges. Additionally, the forcing and measuring need to have high resolution and they need to be highly accurate over a large range from pA to tens of Amperes and from nV to tens of Volts.
Operation modes of SMUs
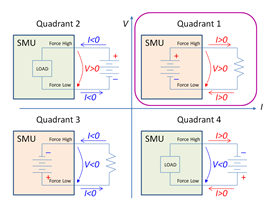
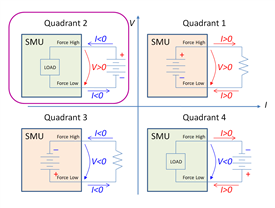
The following figure shows a simplified diagram of an SMU operating in four modes dependent on the voltage and current settings and external circuit configuration.
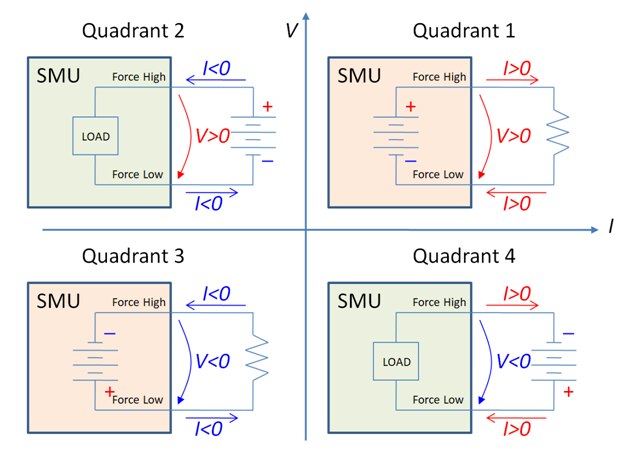
For simplicity in this diagram the SMU is presented with two output pins, “force high” and “force low”. Later the “sense high” and “sense low” pins will be considered in the block diagrams and circuit schematics. The horizontal axis represents the current flowing out of the SMU force high connector and the vertical axis represents the voltage measured between the force high and force low pins. Let’s take a look in more details at these operation modes:
Quadrant 1
When the SMU is programmed in force voltage mode with a positive output voltage and the external load is a passive circuit (no energy sources) then the SMU operates in Quadrant 1 (positive output voltage and positive output current – current flowing out of the force high pin). Also, if the SMU is programmed to force current (high voltage value with current limit, so that the operation is always in the current limit – clamp mode) and if the programmed voltage value is positive then the SMU operates in quadrant 1.
Quadrant 2
When the external circuit contains energy sources depending on the voltage/current settings in the SMU the electric current may flow into the force high pin of the SMU. In this case the SMU instrument operates as an electronic load. Depending on the external circuit and the SMU voltage and current limit settings, if the voltage is positive and the current flows into the force high pin the SMU operates in quadrant 2. We need to notice here that depending on the impedance of the external circuit and the current limit setting on the SMU the SMU may operate in current limit mode (electronic current load) or in resistive load.
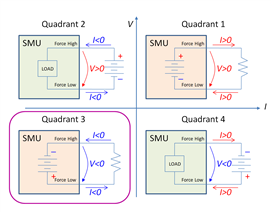
Quadrant 3
The operation in quadrant 3 is very similar to the operation in quadrant 1 with the difference that the programmed voltage is a negative value. Therefore, the direction of the current is opposite, current flows out of the SMU through the force low pin and it flows back into the SMU through the force high pin.
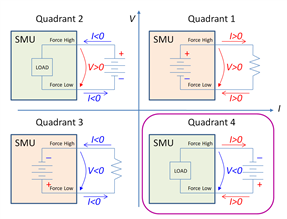
Quadrant 4
The operation in quadrant 4 involves an external circuit that contains energy sources and the polarities of these energy sources are so that the electric current flows into the force low pin of the SMU. The SMU operates as current load or resistive load depending on the voltage and current limit settings.
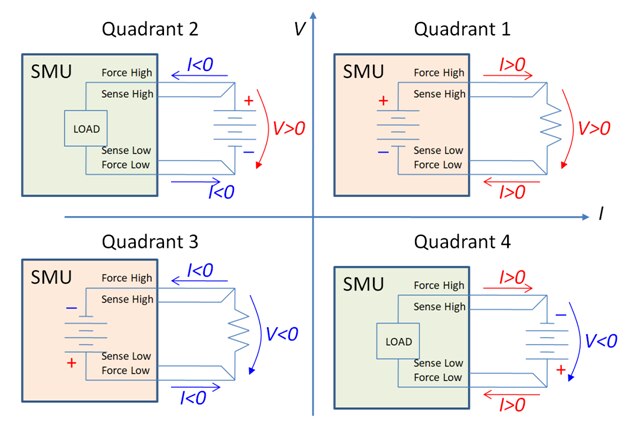
In the discussion above I have intentionally omitted the sense pins of the SMU for simplicity. In those cases the voltage measured by the SMU was the voltage at the force high and force low pins, as shown in the diagrams above. In these cases, if there is a voltage drop on the wires between the SMU and the external circuit under test, also known as device under test (DUT), that voltage drop difference may affect the accuracy of the measurements. For these cases the SMU instruments use sense pins, sense high and sense low, that the user can connect to the pins of the DUT. This way, the measured voltage is right at the pins of the DUT and the voltage drops on the force interconnect wires do not alter the measured values. The diagram below shows the operation of an SMU in the four quadrants including the sense lines. Notice that the measured voltage is now at the external circuit pins and not at the SMU force high/low output pins.
Differences between SMUs and Power Supplies
SMUs integrate the function of a power supply, but they differ from typical power supplies by speed, precision, operation range, and four quadrant versus two-quadrant operation. SMUs are faster so that typically they settle within microseconds while power supplies settle in much longer time within milliseconds. This is important in measurements that use sweeping of voltage or current. The measurement accuracy is significantly higher for SMUs than for power supplies, typically for currents SMUs measurement accuracy is in the order of nanoamperes while for power supplies is in the order of microamperes. But probably the most important difference is the operation in four quadrants versus power supplies that operate only in two quadrants (quadrant 1 and 3). This is important for I-V curve tracing where some DUTs may operate in all four quadrants, and also this is important for battery testing since batteries can source current and thus may require operating in quadrants 2 and 4.
Differences between SMUs and DMMs
An SMU can operate as a DMM however, it has some advantages compared to typical DMMSs. The current source feature together with the separate sense and force terminal makes the SMUs reduce the measurement uncertainty due to leakage currents and due to the resistance of the measuring probes in DMMs. SMUs used in force voltage measure current mode can measure low currents down to picoamperes levels. DMMs do not have the force voltage feature which makes them configure the Ammeter in series/shunt mode, which limits the low current measurement levels to nanoamperes compared to picoamperes for SMUs.
Getting Started with Roadtesting the Rohde & Schwarz NGU401 SMU
Unpacking the R&S NGU401 SMU instrument and Powering UP
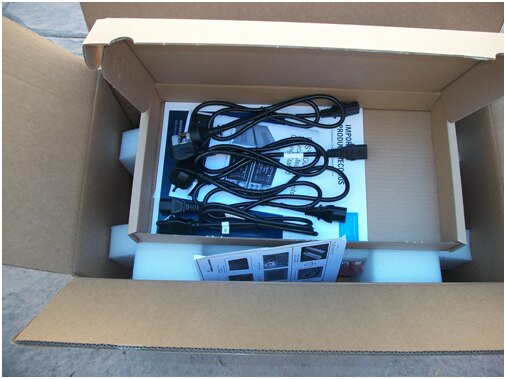
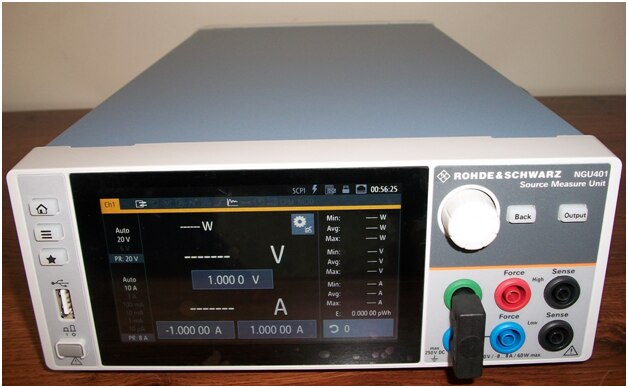
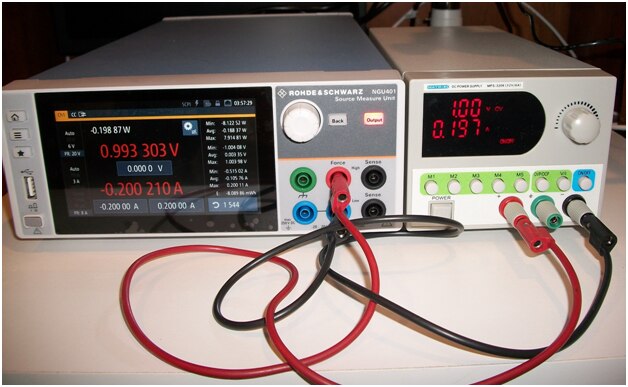
In this section I will describe my experience unpacking and powering up the R&S NGU401 SMU instrument. The package came announced by an email from Element14, so I knew when to look for it on the porch. The package was quite big. Next I opened it and inside I found a smaller box that contained the Rohde & Schwarz NGU401 instrument. I then opened this box and inside indeed it was the R&S NGU401 instrument packed very well around with a thick polystyrene foam structure, as shown in the figure below.

A separate box contained four types of power cables for different standards used in different countries. Also inside the I have found a getting started document and a calibration certificate document.
So I have chosen the one for US and I looked for the connector on the back of the NGU401 SMU instrument. I then noticed a label mentioning that this instrument is set for operating at 230V, which was different than the 120V that I have here in the US.

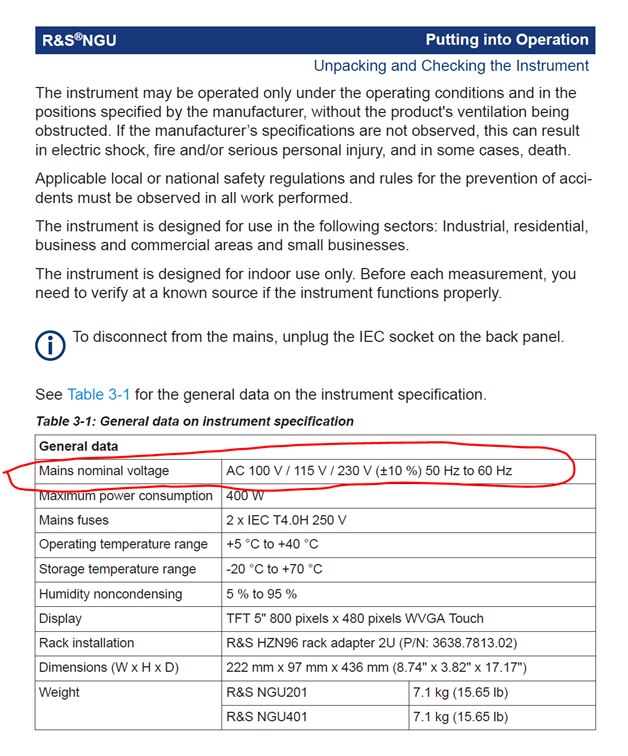
Next I looked at the getting started document and I saw the power listed as 100V, 115V and 230V (+/-10%). Well, 120V was not listed but it was within +/-10% of 115V, so I thought that setting the power supply voltage to 115V should be the correct choice. But the problem was that I didn’t know exactly how to change it from 230V to 115V. I couldn’t find any information about this in the getting started document.
I then thought that this instrument might have an automatic switching power supply that can take 120V and 220V like the typical power adapters of laptop computers that work for both standards without needing the user to change any setting or switch, so I have plugged the NGU401 in the power outlet and I pressed the power button – but nothing had happened.
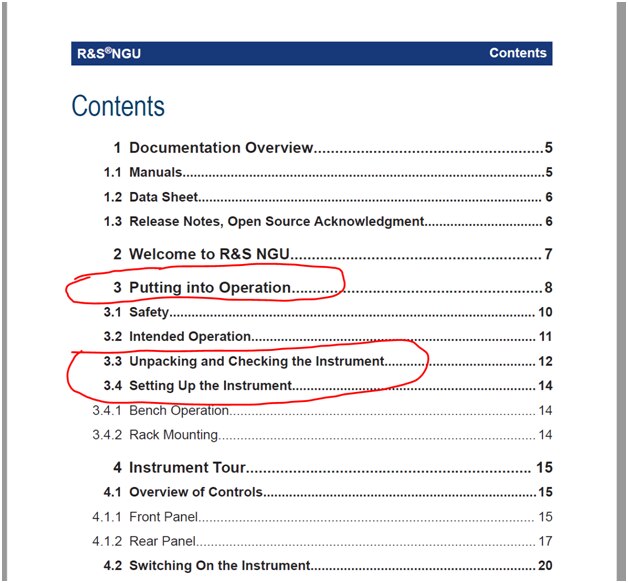
Next I have unplugged the power cord from the power outlet and I have checked again the getting started document, especially the “Putting into Operation” and “Setting Up the Instrument” sections, but still I did not find anything about switching from 230V to 115V.
Then I decided to discover myself how to set it to work for 115V – anyway I was used to discovering circuits functionality and settings from back in 1980s when I was repairing video cassette recorders without having any schematics or service manuals. So I started from where the 230V label was and I figured out that if I grab that plastic structure I can make it slide out of the instrument. So that piece of plastic came out and it held two fuses. Then, exploring more what came out, I have figured out that it was made of two pieces, one sliding into the other, as shown in the picture below.
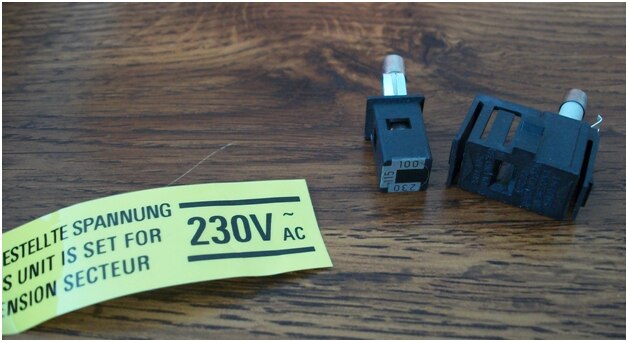
After removing the inside piece (that was holding one of the fuses) I noticed three numbers printed on it that were corresponding to the three voltages listed in the getting started user guide. From this point it was easy – I just plugged the small plastic piece back into the big one rotating it 90 degrees to make sure that the number 115 shows up in the window, as show in the picture below,
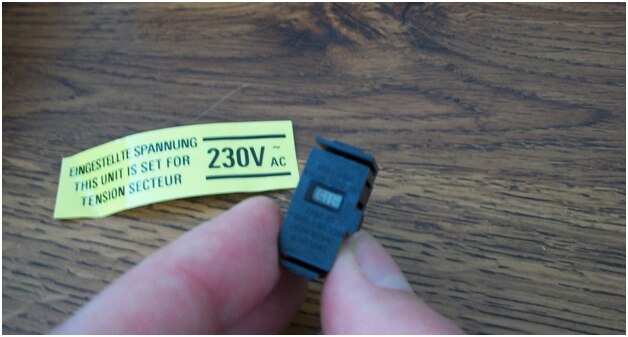
and I have plugged it back into the NGU401 instrument.
Then I have plugged the NGU401 power cable into the power outlet and I pressed the power button – and now it worked:
So it worked now – I was happy that I didn’t need to contact the customer support and to send it for repair.
Getting Started with Measurements
I have started with four simple measurements that have setup the R&S NGU401 SMU to operate into each of the four quadrants explained in the first section above. Here are the details:
Quadrant 1
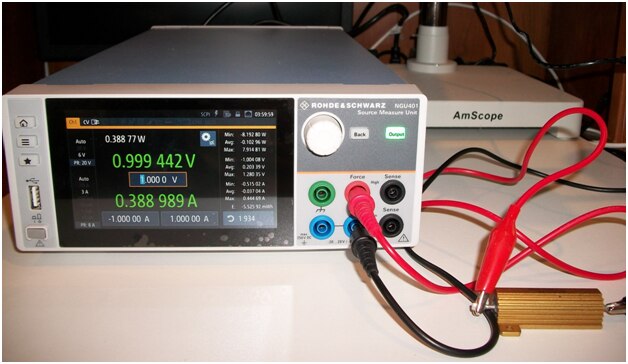
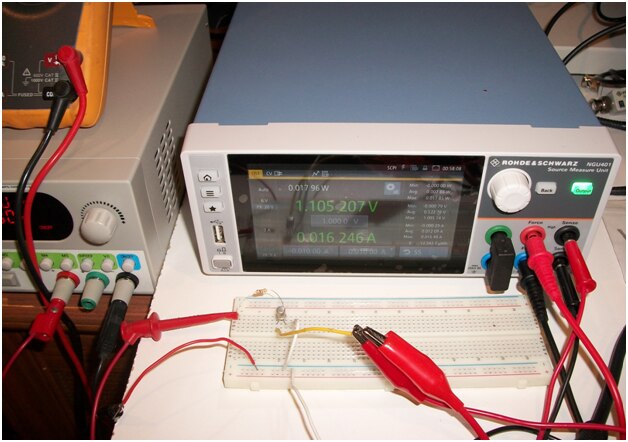
For operation in quadrant 1 I have setup the NGU401 to force a positive voltage, 1V, and I connected an external 2 Ohms resistor between the force high and force low connectors. In this experiment intentionally I did not use the sense lines. The displayed current was 0.388A while the calculated value was 1V/2Ohms = 0.5A. The difference comes from the wires resistance, which we can roughly calculate here as 1V/0.388A – 2 Ohms = 0.57 Ohms for both wires, so 0.28 Ohms per each wire.
Quadrant 2
For operation in Quadrant 2 I have setup the NGU401 in current source mode (force 0V and clamping the current at +/-200mA) and I connected the force high and force low connectors to an external power supply programmed to 1V. The NGU401 goes into current limit mode and functions as a current source sinking 200mA from the external power supply.
Quadrant 3

The operation in Quadrant 3 is setup similarly to the operation in Quadrant 1 with the only difference that the programmed voltage has a negative value. Therefore, the current will also have a negative value, which makes the NGU401 operate in Quadrant 3.
Quadrant 4
The operation in Quadrant 4 is similar to the operation in Quadrant 2 with the difference that the external power supply is connected with opposite polarity, thus, making the NGU401 sourcing current through the force high terminal while the voltage between the force high and force low terminals has a negative value, which makes the NGU401 operate in Quadrant 4.
These were just a few simple measurements to get it started. Next, I will setup more complex experiments and measurements that will exercise various functions and features of the R&S NGU401 instrument.
Update #2:
Comparison of Specs with Other SMUs
I started to create a table of specs comparison among multiple SMUs and then I found three comparison documents on R&S website. From those documents I have extracted the spec comparison between R&S NGU401 and Keithley2460, Keysight N6784AN6784A and Keysight B2901BL SMUs.
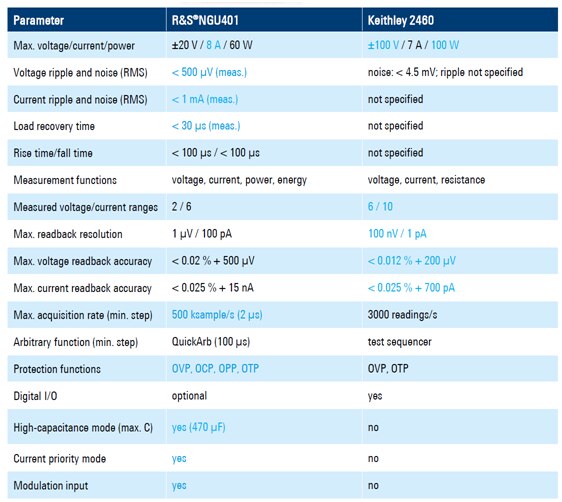
Here is a comparison table between the specifications ofSMUs:
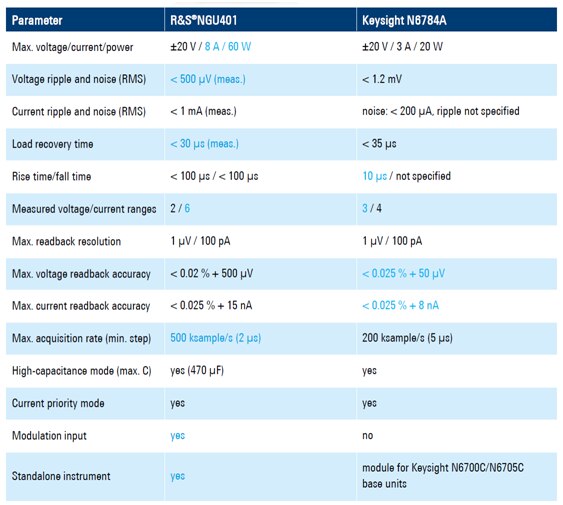
Here is a comparison table between the specifications of R&S NGU401 and SMUs:
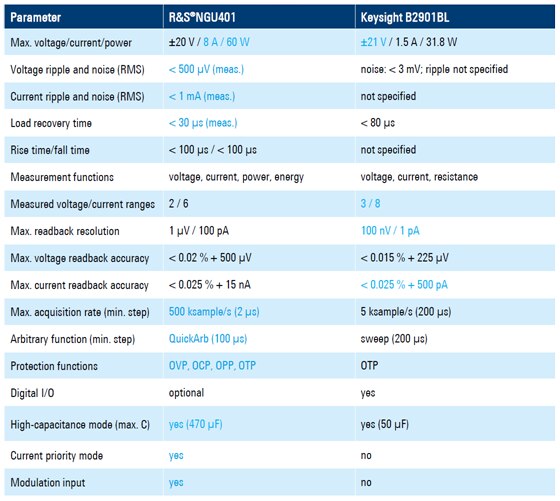
Overall it seems to me that some performance parameters are similar considering the effect of differences in output power/current. The voltage noise seems to be lower for NGU401 and the modulation input is a feature that only NGU401 has.
Rohde & Schwarz NGU401 SMU Instrument Performance Tests
Voltage ripple and voltage noise
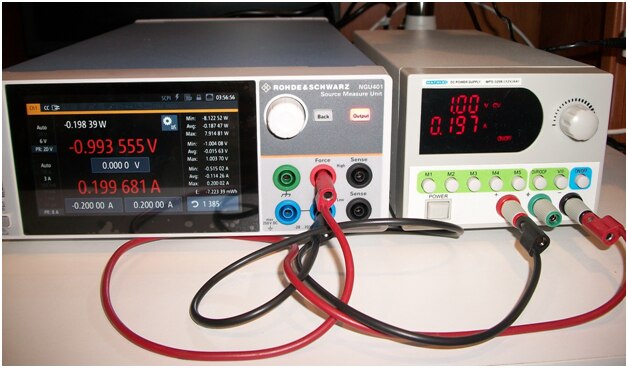
In this experiment I have measured the voltage ripple and noise of the R&S NGU401 with a resistive load and various voltage settings.
Test setup
The test setup consists of the NGU401 SMU connected to a 2 Ohms resistor with separate force and sense wires (4 wire connection) and with an oscilloscope, R&S RTB2004, connected to measure the voltage on the resistor, as shown in the figure below:
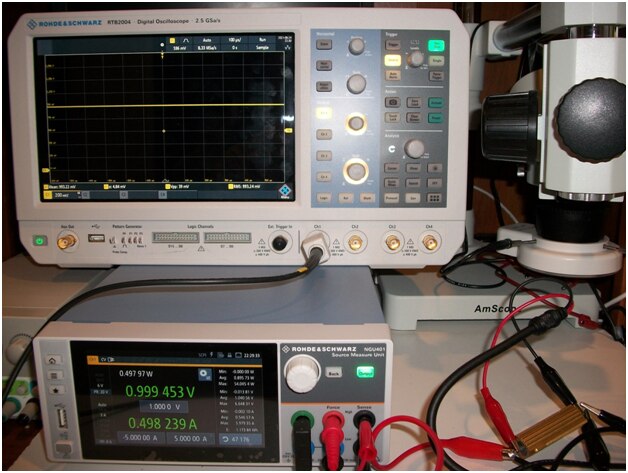
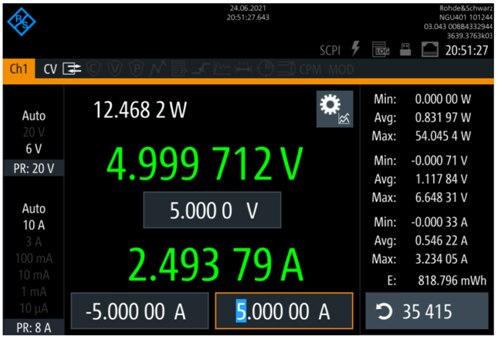
I started by first programming 1V at the NGU401 output:
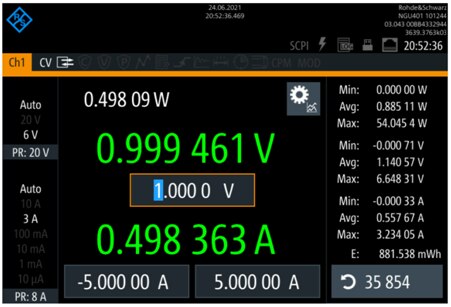
The measured current is as expected 0.999461V/2 Ohms = 0.4997305A. The measured value is a bit lower by about 1mA, which is most probably caused by the resistor having a value a little lower than the nominal 2 Ohms. Using the RBT2004 oscilloscope I have measured the voltage noise at the resistor terminals as 554uV peak to peak. The rms voltage noise is 53.54uV. The oscilloscope probe is connected in AC mode for this connection I was expecting the mean DC value to be 0V; however, the oscilloscope reports about 1mV. I don’t know where this offset comes from, so for now I suspect that is probably caused by the oscilloscope probe (I may need to check the calibration procedure and go through that). The measured voltage ripple of 554uV is close though a little higher than the specified 500uV; however, the difference may be caused by additional noise coupled into the wires and by the resistor noise.

Next I have increased the programmed voltage on NGU401 to 2V:
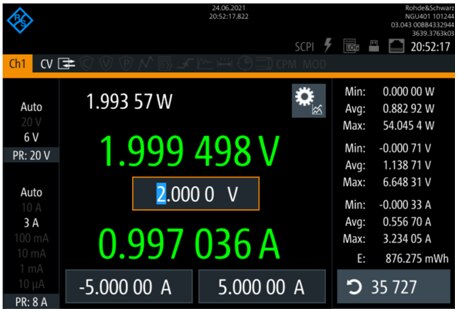
The oscilloscope measurement is shown in the figure below. The peak-to-peak ripple measured with the oscilloscope is now 517uV, also close to the 500uV spec. The rms noise value is 56.32uV.

Next I have increased the programmed voltage on the NGU401 to 3V:
The current has increased and the oscilloscope measured peak to peak voltage ripple has also increased to 646uV. The rms voltage noise has also increased to 59.56uV. So I think the increase is probably due to the resistor thermal noise, which is expected since we increased the current and thus the power dissipated by the resistor, which may have also increased the temperature of the resistor.

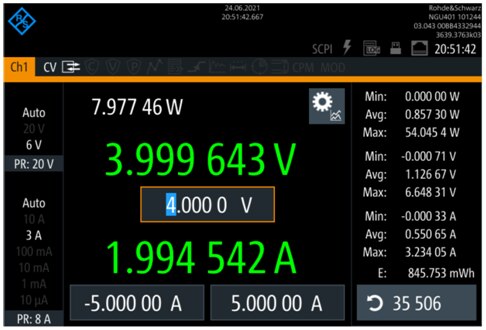
I kept increasing the programmed voltage on the NGU401 SMU to 4V, 5V, 6V and the measured voltage ripple with the oscilloscope was around 600uV except the 5V measurement which was much higher 2.89mV. I didn’t know why such a big difference and I looked at the rms voltage noise, which has not changed significantly being little above 60uV on all these cases.
V programmed = 4V :

V programmed = 5V :

V programmed = 6V :
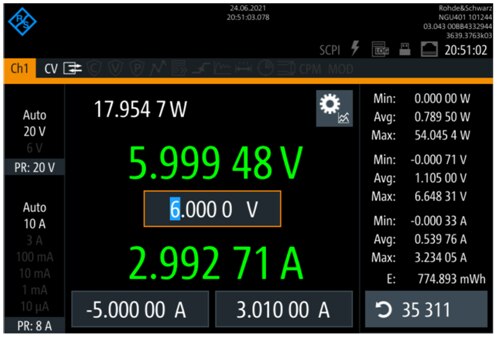
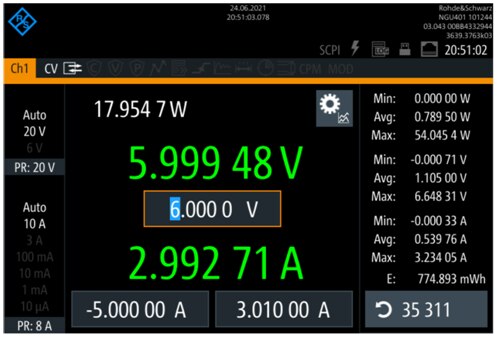
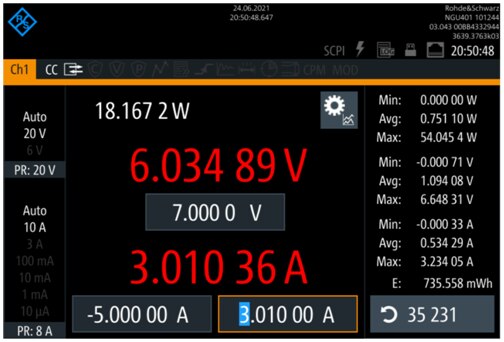
When I programmed the NGU401 to 7V I activated the current mode since the instrument entered the high voltage range mode that has a maximum current of 3A. This is expected based on the NGU401 specifications.

The NGU401 display changed the color from green to red when entering in current limit mode (current clamp) signaling that it changed the functionality mode from a voltage source to a current source. I find the color change feature very beneficial for user since knowing when the operation mode changes to current source mode is essential in the daily work (characterization, debugging, or any other test bench experiment).

Interestingly, the voltage ripple has decreased to 365uV while in current limit (clamping) mode.
NGU401 Arbitrary Waveform Editor and Generator
In this experiment I have programmed various voltage waveforms and analyze the performance versus the specifications. I have started with opening the arbitrary waveform editor, as shown in the figure below:
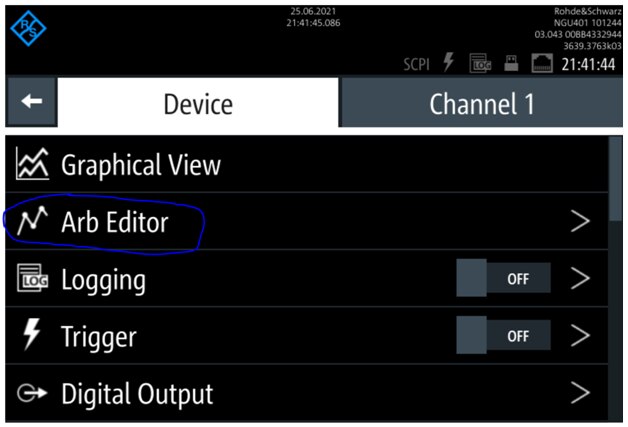
The arbitrary waveform editor uses waveforms stored in csv type text files. The NGU401 SMU comes with a few standard waveforms available in the memory and it also has the function of generating waveforms either through an editor or just loading them from a flash drive.
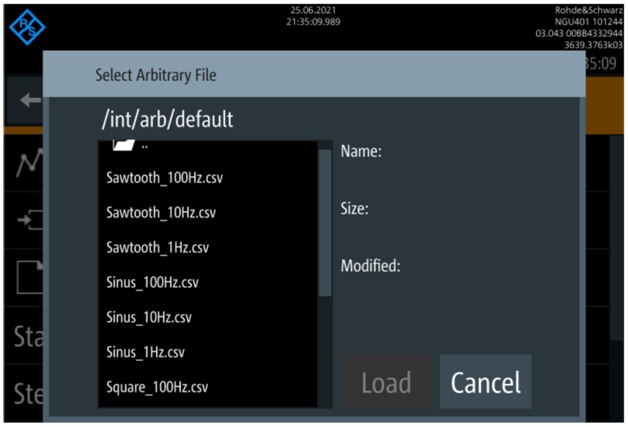
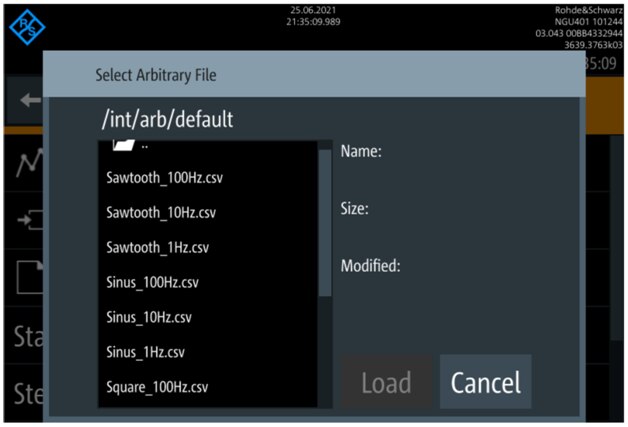
Here is a screenshot with some of the existing waveforms:
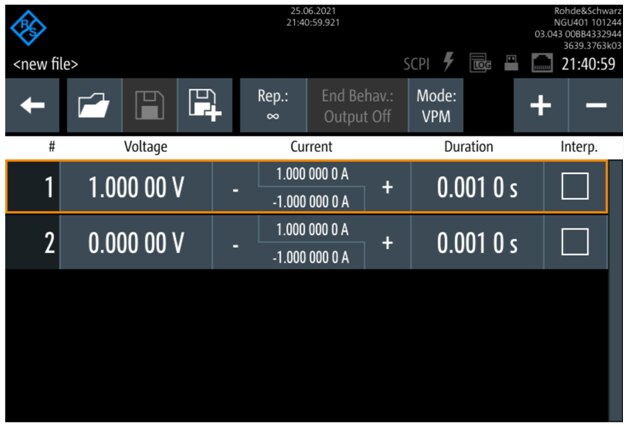
I first started with creating my own waveform, so I clicked on “Cancel” and then I clicked on the symbol at the top of the screen that opens a new waveform editor. In that waveform editor I created a simple waveform that periodically turns ON and OFF the output voltage, as shown in the figure below.
On the last column I have selected the “interpolation” mode, which at first I did not know exactly what it will do to the waveform. Here is a screenshot of the oscilloscope showing my waveform with the interpolation feature:

So the interpolation was actually generating nine steps in the low to high and high to low transition.
Then I went back to the waveform editor and I turned off the interpolation:
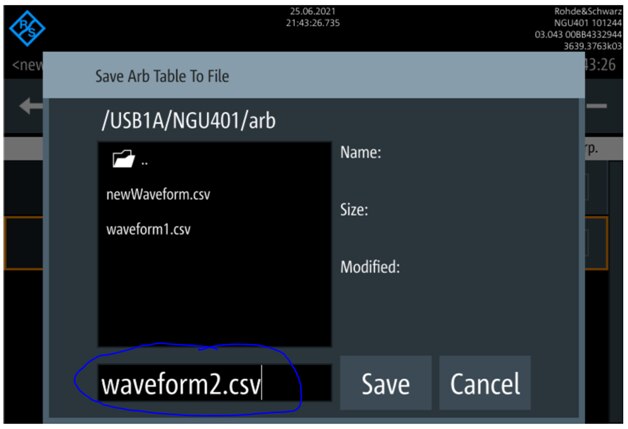
I have saved this new file as wavefrom2.csv
Next I turned on the NGU401 output and I checked the waveform on the oscilloscope screen:

This was a “pulse” waveform without interpolation that was only “bouncing” between 0 and 1V (the programmed voltage).
Next I have opened the file Square_1kHz.csv from the internal memory of the NGU401 SMU and I used the RBT2004 oscilloscope to measure the rise and fall times:
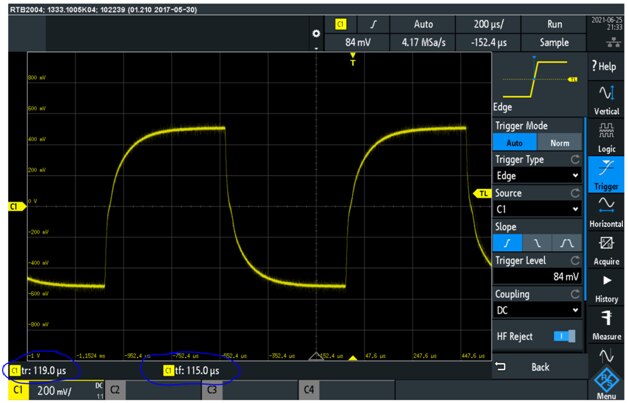
The measured rise time was 119us and fall time 114us, which came aa bit higher than the spec of 100us. The difference can be attributed probably to the wire capacitance and inductance or maybe to the time voltage step used in the csv file. A smaller step may generate a faster edge.
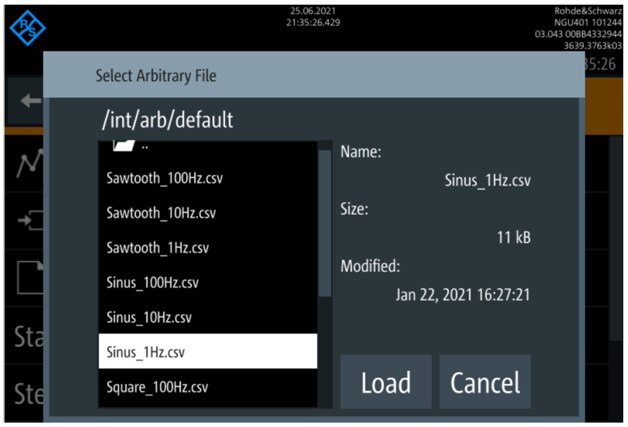
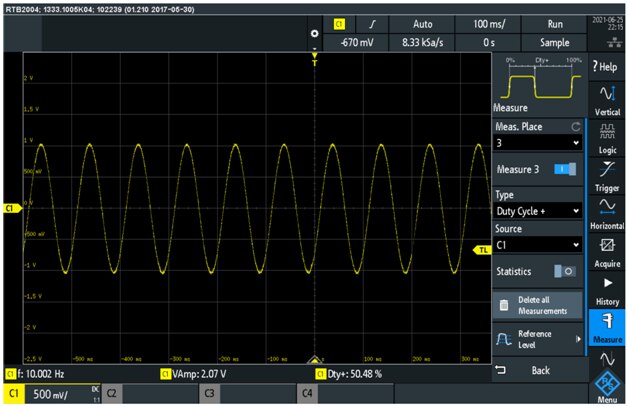
Next I wanted to see how the NGU401 SMU generates a sinusoidal waveform. So I want back to the arbitrary waveform editor and I selected the file Sinus_1Hz.csv from the internal memory:
The arbitrary waveform menu showed the loaded file name and the path to that file:
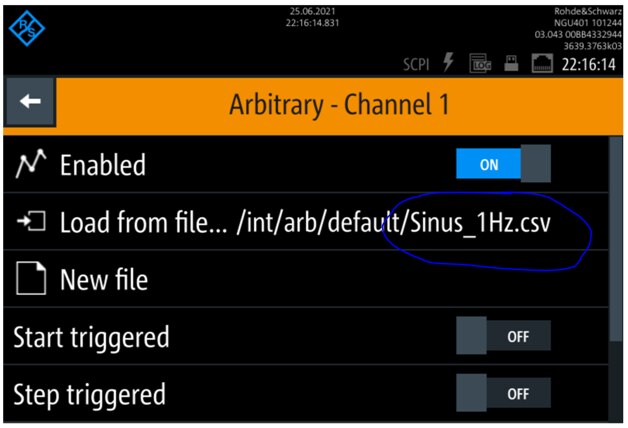
I then turned on the NGU401 output channel and I checked the waveform with the oscilloscope. The waveform looked like a “perfect” sinusoid, which impressed me, the frequency measured with the oscilloscope was 1.0006 Hz, amplitude 2.06V, and duty cycle 50.02%.

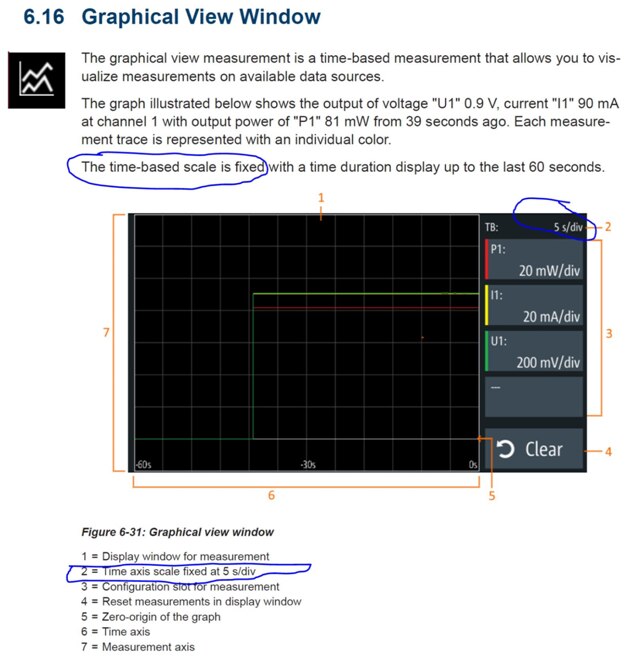
Next I wanted to look at the NGU401 “Graphical View” built-in function, that displays in real time the waveform of the generated signal. So I have selected the “Graphical View” option from the settings menu and the NGU401 started to show the output waveform as shown in the screenshot below:
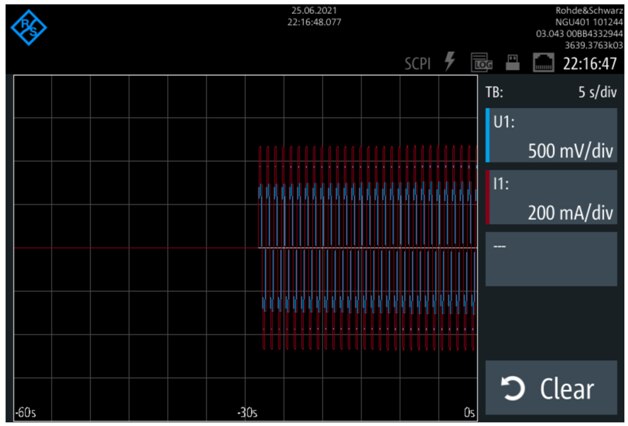
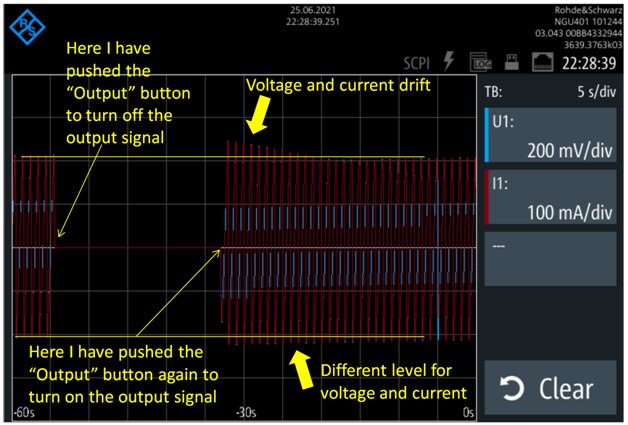
The display spans through 60 seconds, so the initial waveform was just a 0V/0A horizontal line before I pressed the “Output” button to turn on the NGU401 output signal. After I pressed the button, the display started to show the waveform; however, the time base is fixed at 5 seconds / division, and thus the sinusoidal signal was very “compressed” horizontally and it looked more like some square wave or just arbitrary periodic signal. However, the magnitude of the voltage and current were visible with the corresponding 500mV/div and 200mV/div magnitudes. The vertical scale can be adjusted by touching the “U1” and “I1” rectangles on the screen (it opens a settings menu for the vertical axis).
I have then loaded a sinusoidal waveform of 10 Hz frequency:
But the NGU401 graphical view function could not show the waveform – it looked to me like a bandwidth limitation:
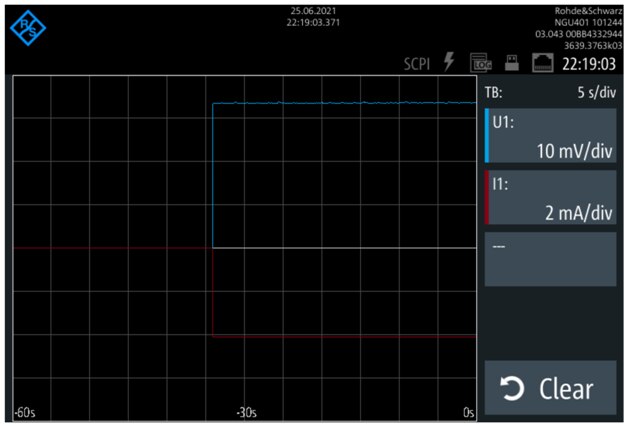
This was hard to believe at 10Hz, where most of the electronic circuits functions well. So I think the sense/measurement hardware inside the NGU401 works at 10Hz frequency, but most probably the firmware software does not process the measurement correctly and it does not display it properly.
I think this issue creates confusion since the user may think that the NGU401 generates an output voltage of 33mV magnitude and the current value is -4mA, which does not represent what actually happens in the circuit. The oscilloscope shows that the output voltage is a sinusoidal signal with 1V amplitude (2V peak to peak) and applying Ohm’s law for a 2 Ohm resistor load we can easily observe that the current should sinusoidal and with a magnitude different than -4mA. So in this case the NGU401 graphical display does not function correctly.
What I would do if I were to modify the firmware, I would represent the “even more compressed” sinusoidal signal by its envelope, like I am showing in the annotated screenshot below:
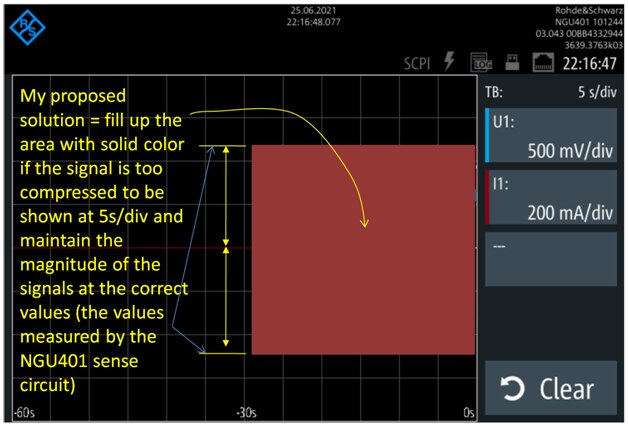
This is more intuitive for representing the NGU401 output signal since it shows the magnitude of the signal even though it does not show the sinusoidal shape.
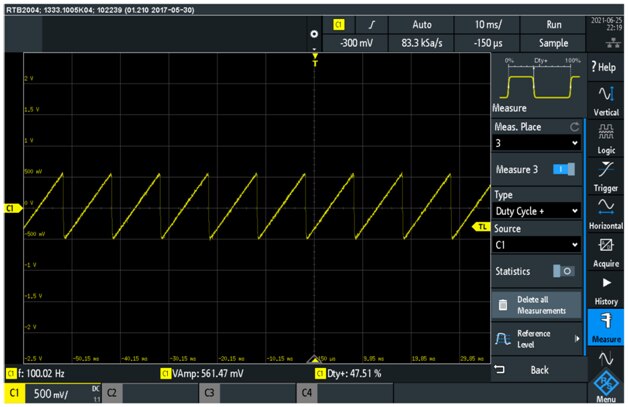
I have then programmed a sawtooth waveform, which behaved similarly with the sinusoidal waveform – the NGU401 output signal was correct but the graphical view worked correctly only at 1Hz frequency and not at higher frequencies. Here are the oscilloscope and NGU401 displayed waveforms at frequency of 1Hz:

And on NGU401:
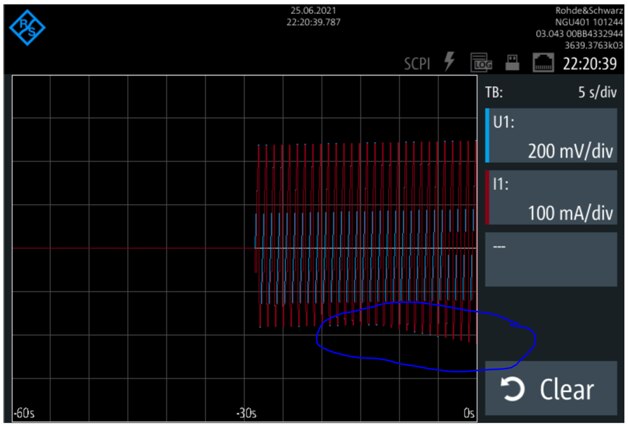
Notice a drift that I have captured on the lower side, which I will analyze in the next section.
I have then switched to 100Hz frequency and here are the oscilloscope and NGU401 displayed waveforms at 100Hz:
We notice the same behavior as for sinusoidal signal case, where the displayed waveform and magnitudes at 100Hz are not correct.
More analysis of the drift:
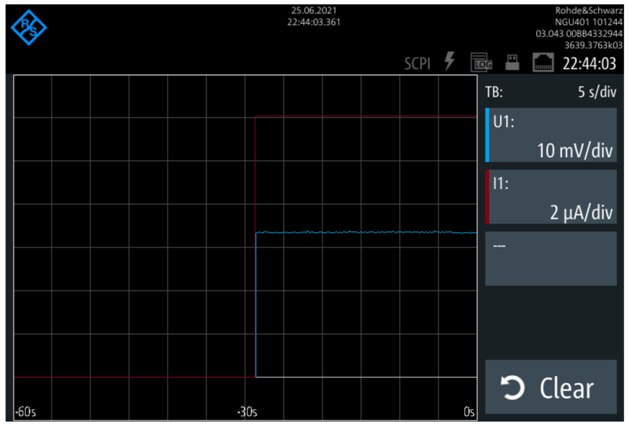
I have then looked in more detailed at the drift observed on the 1Hz sawtooth waveform above after I turned on the NGU401 output. Basically I wanted to understand if there is a drift in the output signal or only in the measured signal displayed on the NGU401 graphic viewer. So I have setup an experiment where, while having a stabile signal for a long time I suddenly turned off the NGU401 output and after a few seconds I turned it back on and checked the waveforms on the oscilloscope and on the NGU401 graphic viewer. The results are summarized in the two annotated screenshots below (one showing the NGU401 graphic viewer and the second showing the oscilloscope screenshot):
And on the oscilloscope:
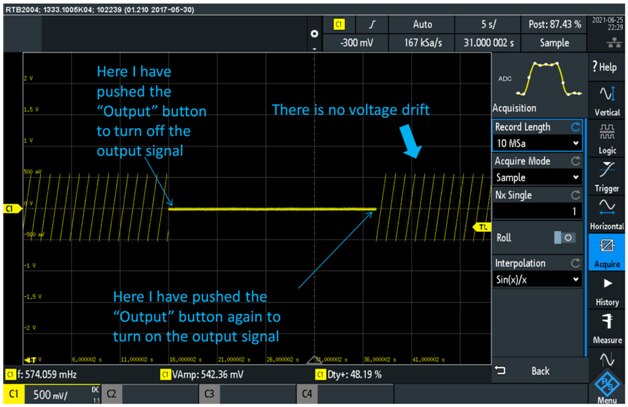
So the drift comes from the measurement feature of NGU401 or from the graphical view function. The drift is not present on the forced voltage/signal of NGU401. So this may be cause by either a hardware limitation on the NGU401 measurement path (like a capacitor that is not precharged or a series capacitor, or a software “bug” or limitation in the firmware that does a sample average in a long time without dynamically compensating for DC shifts). Good news for me as an user of the NGU401 SMU was that the actual output of the SMU does not have any drift.
Update #3:
Voltage priority mode and current priority mode
The NGU401 SMU may operate in either voltage priority mode, which is the default mode, or in current priority mode. These two modes control how fast the SMU regulates the output voltage and the output current. In the default mode, voltage priority, the regulation control loop “prioritize” the output voltage control, which means that the focus is on settling the voltage fast and with little or no overshoot. In this case the current may overshoot or it may take a longer time to settle. In the current priority mode the SMU regulation loop focusses on settling the output current fast and with little or no overshoot. In this mode the output voltage may overshoot and/or it may take longer to settle. This current priority mode is necessary when testing devices that are sensitive to current spikes, like for example LED diodes.
In my experiment I have setup a resistive load that switches on and off and I used an oscilloscope to probe the voltage and the current. The NGU401 SMU has been setup to operate in voltage priority mode and then it has been set to operate in current priority mode. The voltage and current measured with the oscilloscope are shown in the figure below:
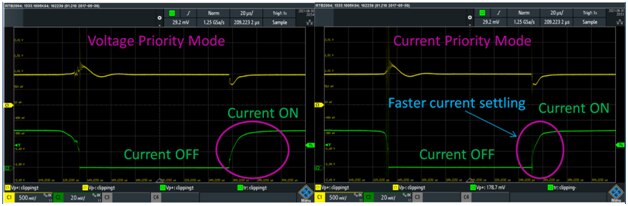
We can see that the current settles faster in current priority mode. The voltage regulation seems to be a little better in voltage priority mode, though the difference is not so significant as the difference in the current settling time.
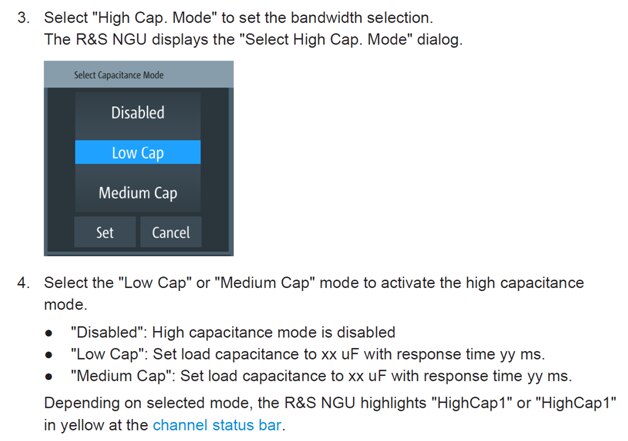
High Capacitance Mode
Based on the description in the user guide, the high capacitance feature optimizes the NGU401 output response time with capacitance loads. What I understand is that when the device under test is highly capacitive and it is connected to the NGU401SMU through wire leads, the the leads and capacitance forms a low-pass filter which causes current oscillation at the output of the NGU401 SMU. When theNGU401 is set to operate in high capacitance mode it compensates the DUT capacitance and displays the current directly at the DUT. So for me it looks like the high capacitance mode has something to do to the NGU401 control loop response bandwidth and stability. The settings on the NGU screen are “Disabled”, “Low Cap”, and “High Cap”:
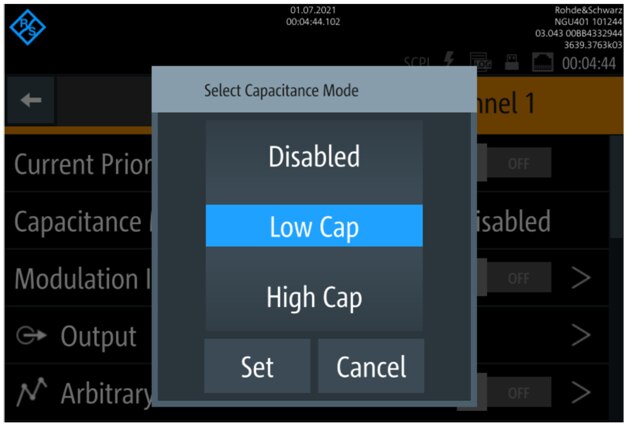
However, this is a bit different than what is shown in the user manual, which shows “Medium Cap” instead of “High Cap”:
To test the high capacitance modes I have setup a DUT with a 3300uF electrolytic capacitor and in series with a 2 Ohms resistor. I then used an oscilloscope to probe the voltage on the DUT and the current through the DUT (by measuring the voltage drop on the series 2 Ohms resistor). With this test setup I then programmed the NGU401 sequentially to operate in high capacitance “Disable” mode, “Low Cap” mode and then “High Cap” mode. Here are the results of my experiments:
High Capacitance mode disabled:
The figure below shows the voltage on the DUT (green trace) and the current through the DUT (yellow trace) when turning on the output of the NGU401 SMU (yellow is current V_displayed/2 Ohms = Current value in A).

When I pressed the “Output” button on the NGU401 front panel a voltage of 1V was applied to the DUT. Since the DUT is primarily capacitive, the current has a spike and then it decreases exponentially as the capacitor gets charged. There is no oscillation or instability noticeable in the voltage or current waveforms.
High Capacitance mode set to “Low Cap”
I have then setup the NGU401 in the “Low Cap” mode. The figure below shows the voltage on the DUT (green trace) and the current through the DUT (yellow trace) when turning on the output of the NGU401 SMU:

So in the “Low Cap” mode I could see temporary ringing on the voltage and current immediately after turning ontheNGU401 output. The voltage ringing has about 0.5V amplitude and lasts for about 2ms.
High Capacitance mode set to “High Cap”
I have then setup the NGU401 in the “High Cap” mode. The figure below shows the voltage on the DUT (green trace) and the current through the DUT (yellow trace) when turning on the output of the NGU401 SMU:
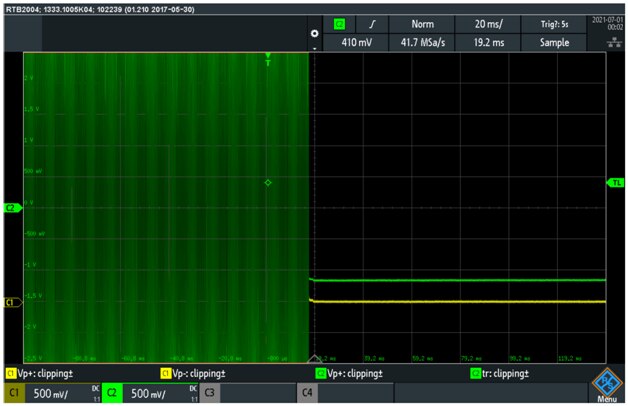
The oscilloscope showed a large oscillation for a fraction of the second until I heard a “click” in the NGU401 SMU and then the displayed waveforms turned into horizontal flat lines. The voltage has dropped to zero. I have then looed at theNGU401 screen and I saw this message suggesting me that it had activated a protection mode that turned off the output:
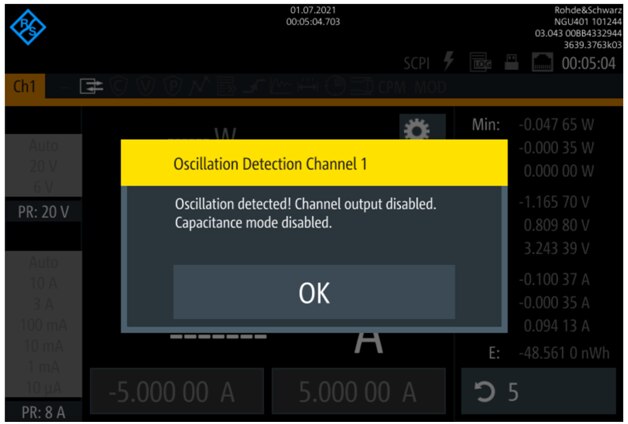
It is great the the NGU401 has a protection for the control loop going out of control unstable mode. However, a problem I see is that during this oscillation mode the NGU401 output voltage goes much higher than the programmed 1V, so if the DUT is sensitive to higher voltage this NGU401 instability mode may destroy the DUT. So I propose implementing a voltage clamping mode that if the NGU401 loop goes unstable to limit the output voltage (and current) to the programmed values.
This concludes the evaluation of basic measurements; next I will install the software and run some voltage sweep experiments.
Software Installation and Testing
There are two software applications for NGU401 available to download on the Rohde & Schwarz web site HM Explorer and NGx Sweep Tool.
Working with HM Explorer Application
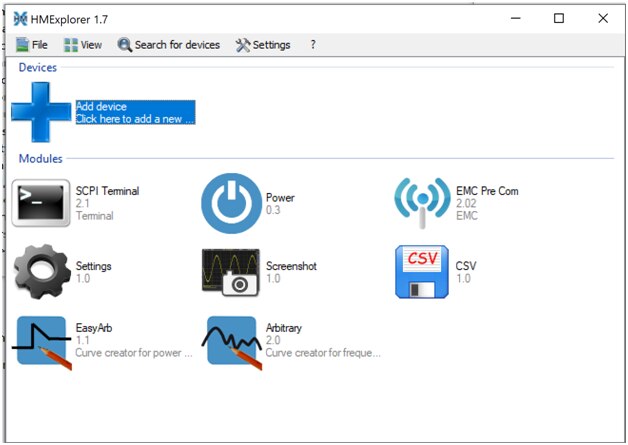
First I have installed HM Explorer that worked quite well from the beginning – I was able to add the NGU401 instrument as shown in the screenshot below:
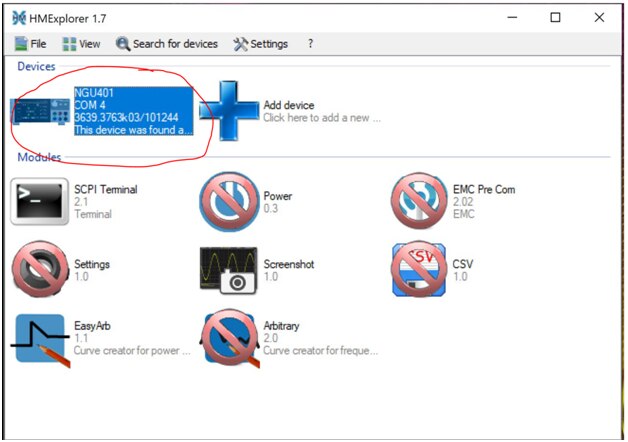
All available modules worked except the screenshot function which gave me an error:
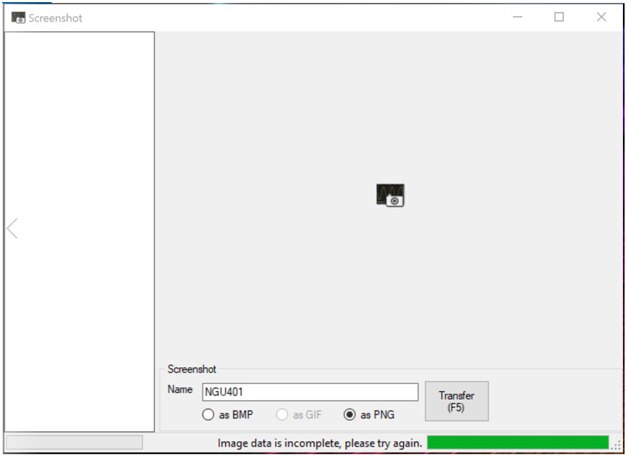
I have tried this a few times but every time I got this error. This was okay since I could actually take screenshots directly on the NGU401 and save them on a flash memory stick. After I played a bit with the SCPI Terminal and EasyArb modules I decided to focus more on installing and exploring the sweep application, NGx Sweep Tool.
Working with NGx Sweep Tool Application
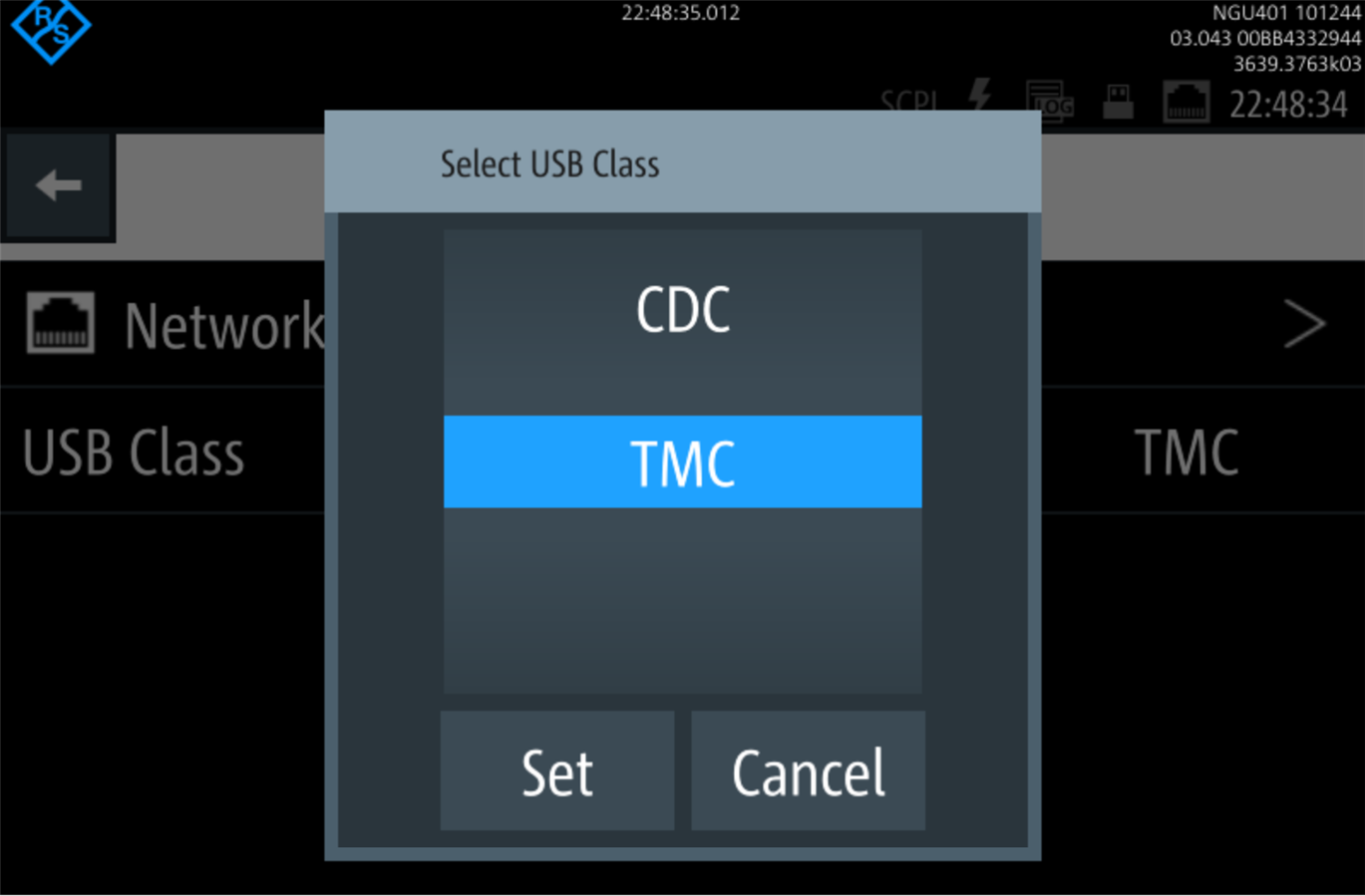
Next I installed NGx Sweep Tool, but this one did not work at the beginning. So I started to troubleshoot the issue. First I learned that I need to change the USB mode to TMC in the NGU401 settings:
But this did not fix the problem. So I have read more through the documentation I found this chart that describes various interface modes:

Since the error I got when trying to connect the NGx Sweep Tool to NGU401 SMU has mentioned something about VISA, I did some more reading on the VISA topic and I found this document:
This document explained me more about what VISA means – Virtual Instrument Software Architecture that is maintained by IVI foundation. Reading this suggested me to find and install VISA because it may come with the driver I need for the NGx Sweep Tool, so I have looked for and found this web page:
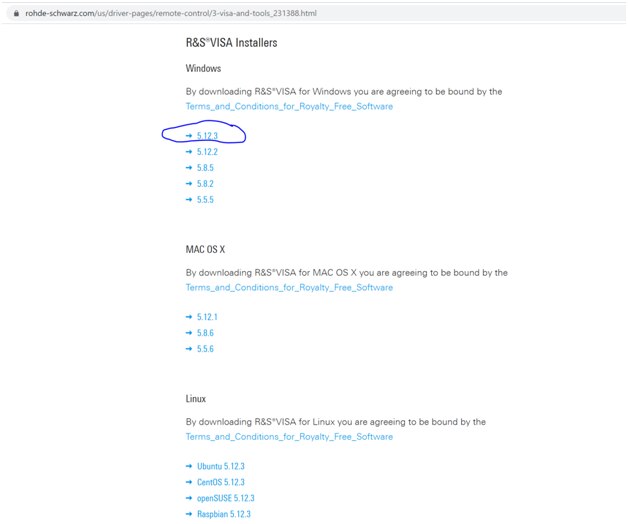
Then I have downloaded and installed VISA 5.12.3, which, as I have anticipated, came with an IVI driver for the USB connection:
Installing VISA with the IVI driver has fixed the problem with the NGx Sweep Tool, which started to work now. However, HM Explorer does not find the NGU401 anymore after installing VISA driver:
But I am okay with that since I need more the NGx Sweep Tool than the HM Explorer. So from this software installation/testing experience I have learned that I cannot run both NGU401 software applications – HM Explorer and NGx Sweep Tool - at the same time, so I have chosen to keep the NGx Sweep Tool because it provides already built-in functions for automated measurements.
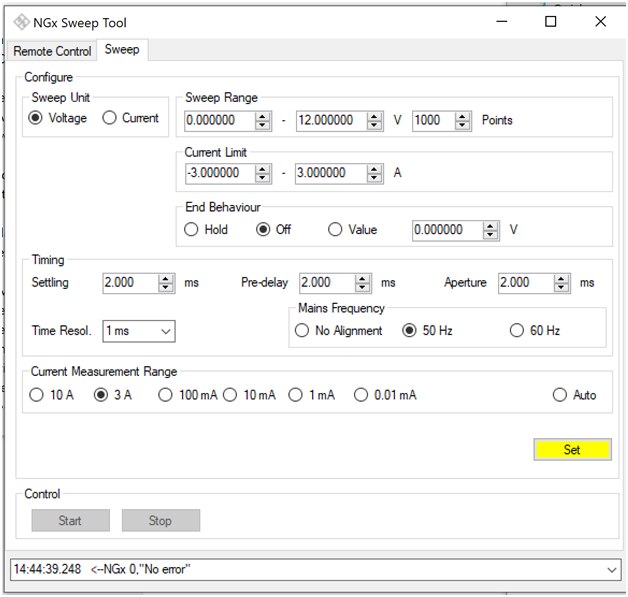
The NGx Sweep Tool offers a variety of sweep modes and parameters settings. Here is a screenshot of the control panel:
Using this sweep tool I have setup and run a few experiments that I have described below:
I-V Curve of a 2 Ohms Resistor Load
Voltage Sweep
We expect the I-V curve of a resistor to be a straight line since the resistor is a linear element with a constant resistance value. So I = V/R and it should vary linearly with V. Here is the setup for this experiment in the NGx Sweep Tool front panel and on the right side we can see the sweep result.
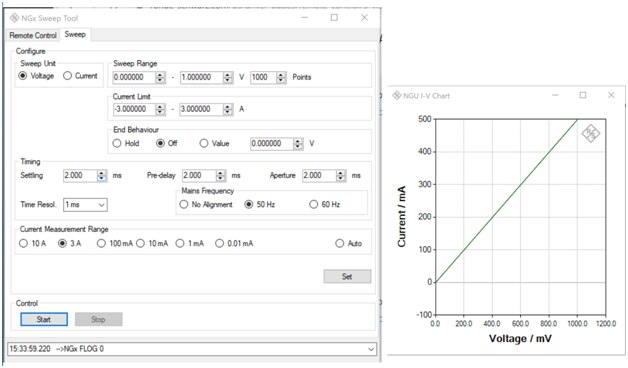
Indeed, as we expect, the current varies linearly with voltage. The NGx Sweep Tool has a feature that if I right-click on the green trace it opens a menu window that allows me to save the I-V curve as a text file in the csv format. This is very useful for further analysis since the csv file can be opened an processed in multiple software applications like for example Microsoft Excel.
Current Sweep
Here is another sweep, this time the current is swept from -1A to 1A. The resistor value is the same 2 Ohms like in the previous test setup.
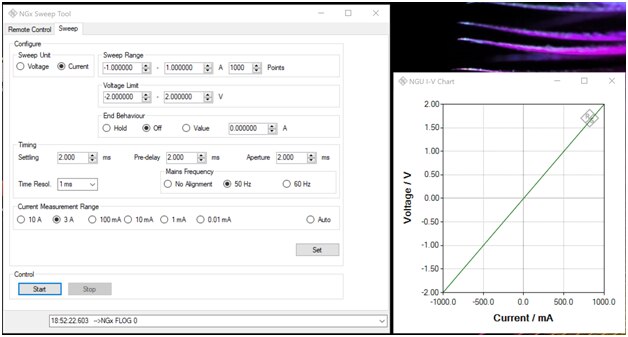
The voltage on the resistor varies linearly as expected from Ohm’s Law V=IR.
I-V Curve of a 4 Ohms Resistor Load
For the 4 Ohms resistor I have expanded the voltage sweep range to 12V, which made the maximum expected current 3A. In this experiment we also expect the I-V curve of a resistor to be a straight line since the resistor is a linear element with a constant resistance value. Here are the settings in the NGx Sweep Tool application and the sweep result:
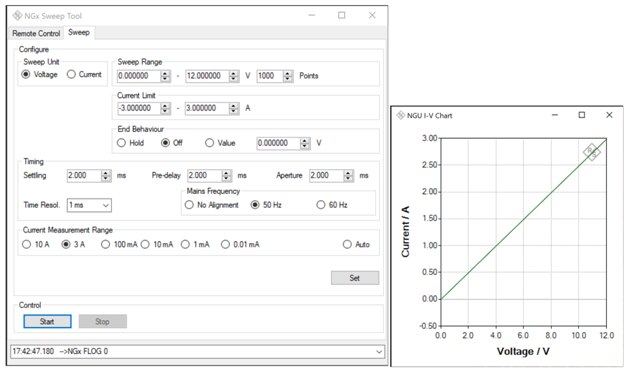
As we expected the I-V curve of this 4 Ohms resistor is a straight line.
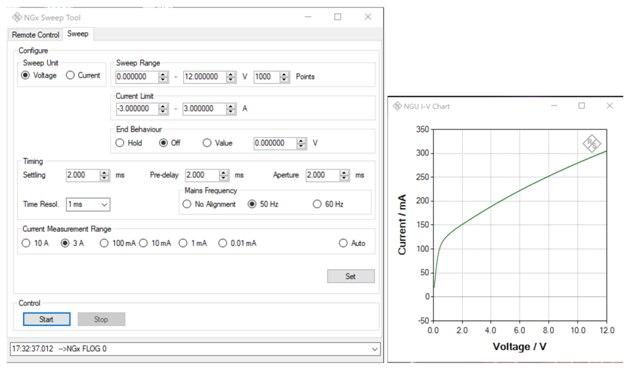
I-V Curve of a Non-linear Resistor
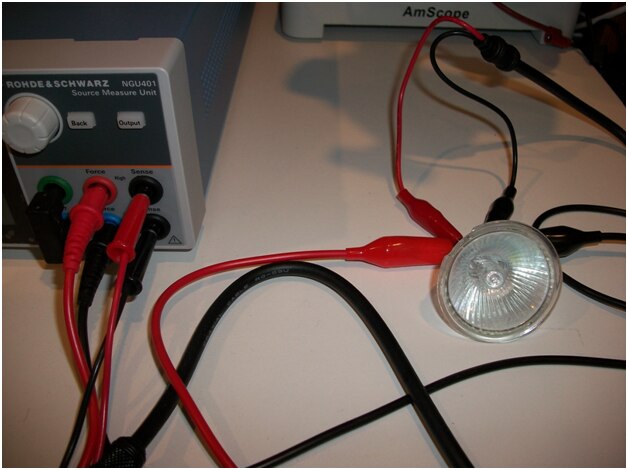
Next I wanted to use the NGU401 SMU to trace the I-V curve of a non-linear resistor. So I have picked as device under test an incandescent type bulb of 12V nominal voltage, like I am showing in the figure below:
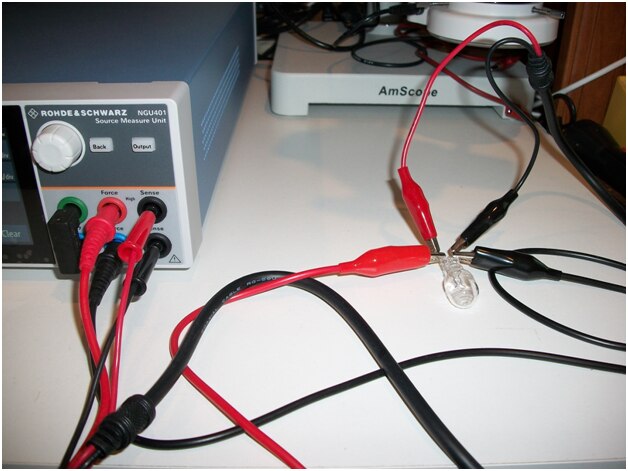
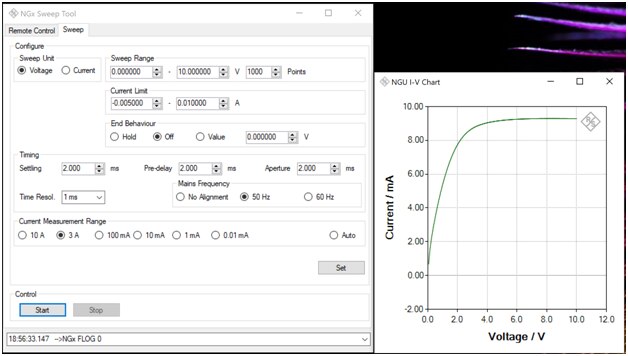
With this setup I have programmed a voltage sweep from 0V to 12V using 1000 points. The measured I-V curve is shown on the right side plot and we can see that the current is no longer a linear function of the applied voltage.
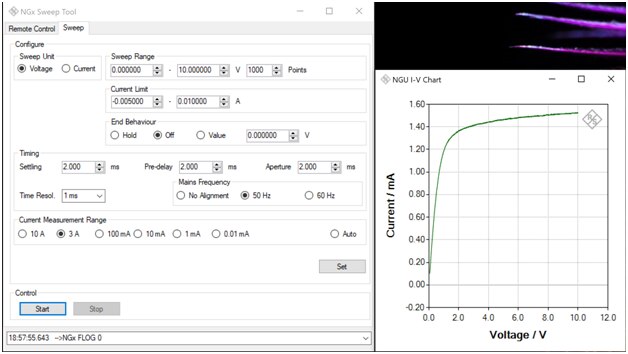
Next I wanted to measure the I-V curve of a Halogen type incandescent bulb (also of nominal voltage of 12V). So I have setup a similar experiment but this time using a Halogen bulb:
I have kept the same settings for the sweep in the NGx Sweep Tool control panel. The measured I-V curve is shown on the right side of the screenshot below:
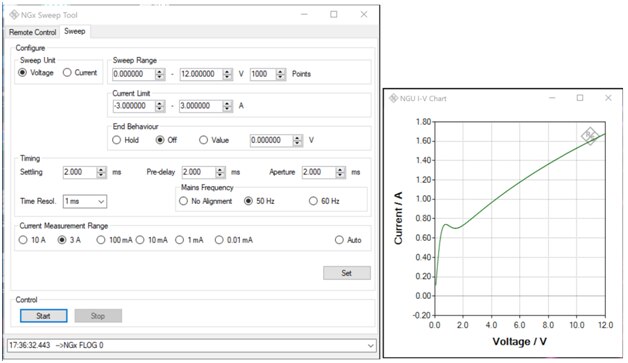
Here we can see that the I-V curve is also non-linear, which we have expected, but interestingly it has also a non-monotonic region. That non monotonic region seems to be related to the moment the bulb starts to light up.
Measuring the I-V Curve of a Diode
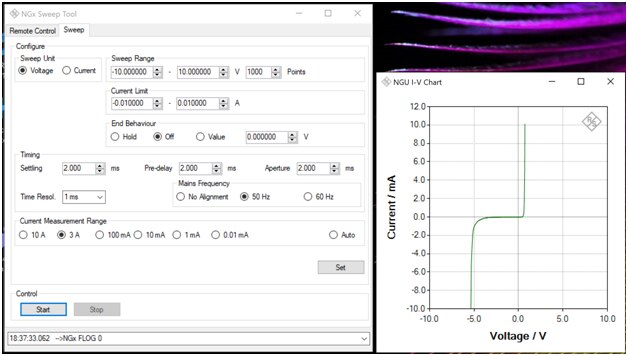
Next I have setup an experiment to measure the I-V curve of a PN junction diode. For this measurement I have programmed the NGU401 to do a voltage sweep from a negative voltage to a positive voltage -10V to 10V initially and then I have reduced the range to -1V to 1V to take the measurement shown in the figure below:
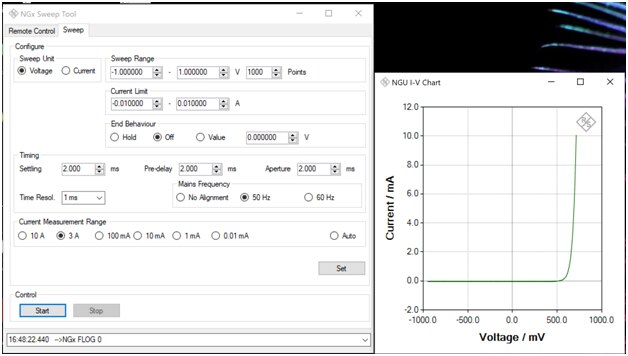
We can see that the diode current has very low values for reverse bias voltages and increases at bias voltages above around 0.6V, which is typical for rectifying PN junction silicon diodes.
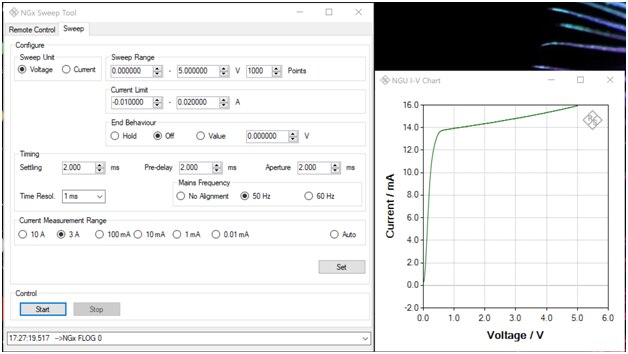
Measuring the IC-VBE Curve of a Bipolar Transistor
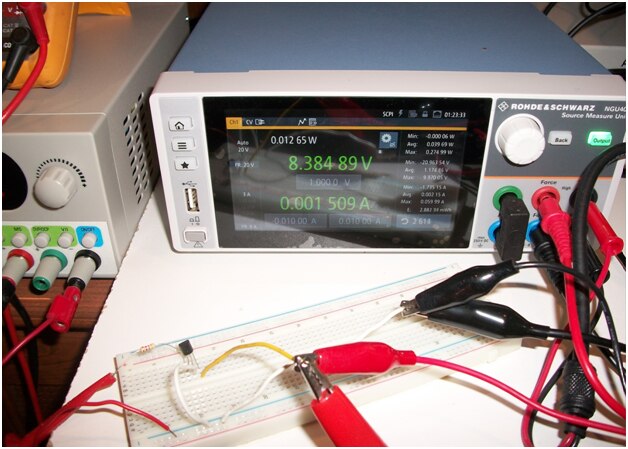
The measurement setup is shown in the figure below. For biasing the base I have used an external power supply connected to the transistor through a 4.6kOhms. For measuring the base bias current I have used a Fluke77 DMM that has measured the voltage drop on the 4.6kOHms resistor.
The NGU401 voltage sweep settings and the measured IC-VBE curve is shown in the figure below. In this measurement the base current was 60uA.
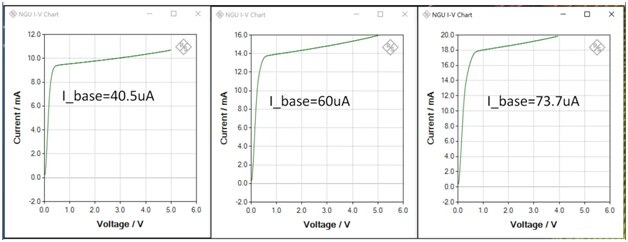
Dependency on base current:
I have then repeated the measurement at different base current values, as shown in the figure below:
Measurement of the ID-VDS curve of a JFET n-channel 2N5458
In this experiment I have measured the ID-VDS curve of a JFET n-channel transistor (2N5458) at different gate bias voltages: 0V, 1V, -1V, and -1.5V. The JFET channel is ON (conducting at VGS=0V) as shown in the picture below:
The bias for the JFET gate is provided by a separate power supply, shown in the left side of the picture. The NGU401 SMU is connected using four leads (force and sense high and low) to the drain and source of the JFET transistor. The voltage sweep setup and measurement results for the four VGS cases are shown below:
Case1: Vgs=0V
The JFET channel is ON (conducting at VGS=0V) as shown in the figure below:
Depending on VDS voltage, the transistor goes through triode and then saturation operating regions.
Case2: Vgs=1V
When increasing VGS to 1V the JFET channel is still ON (conducting) and the drain current is higher than it was in case1.
Case3: Vgs=-1V
For negative VGS, the transistor starts to close the channel and we can see that the saturation current has a much lower value than for VGS=0V and VGS=1V.
Case4: Vgs=-1.5V
condition and we can see that the saturation current is now 400uA, significantly lower than 5mA (VGS=0V) and 9mA (VGS=1V):
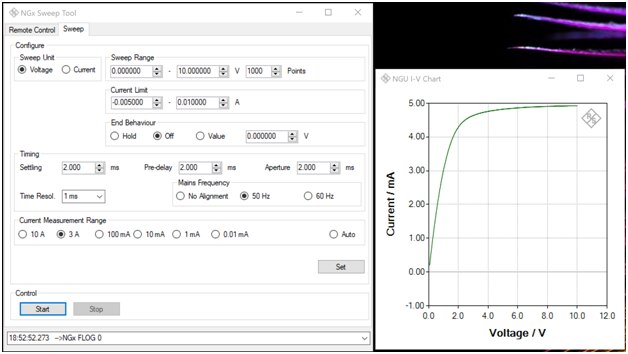
Measuring the I-V Curve of a Zener Diode
In this experiment I have used the R&S NGU401 SMU to measure the I_V curve of a 5.3V Zener diode. The measurement setup is shown in the figure below. The NGU401 had been connected to the Zener diode in four terminal mode: force and sense high and low, as shown in the figure.

The NGU401 SMU has been setup to sweep voltage using the NGx Sweep Tool software running on a PC. The PC was connected to the NGU401 using a USB cable. The sweep setup and measured I-V curve is shown in the figure below:
We can see Zener effect on the I-V curve by the reverse breakdown current increasing rapidly at around -5.3V.
This concludes the third update. I will come back with another update as soon as I get more work done.
Best Wishes,
Cosmin
Top Comments