


The Teseo-LIV3 GPS module (as used in shabaz ' GPS / Galileo / BeiDou / GLONASS receiver) talks UART and I2C. I'm writing an OO driver for it, for embedded systems. In this blog, how to invoke commands and get data back:
- an overview of the NMEA commands that the library understands
- how to invoke any other command, using the library lower level methods.
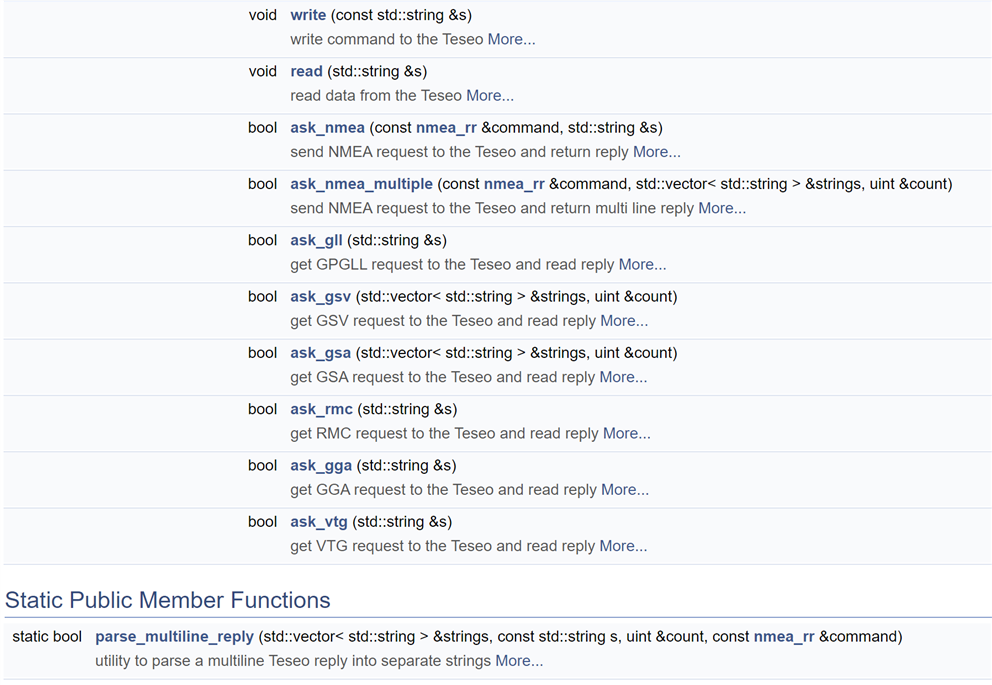
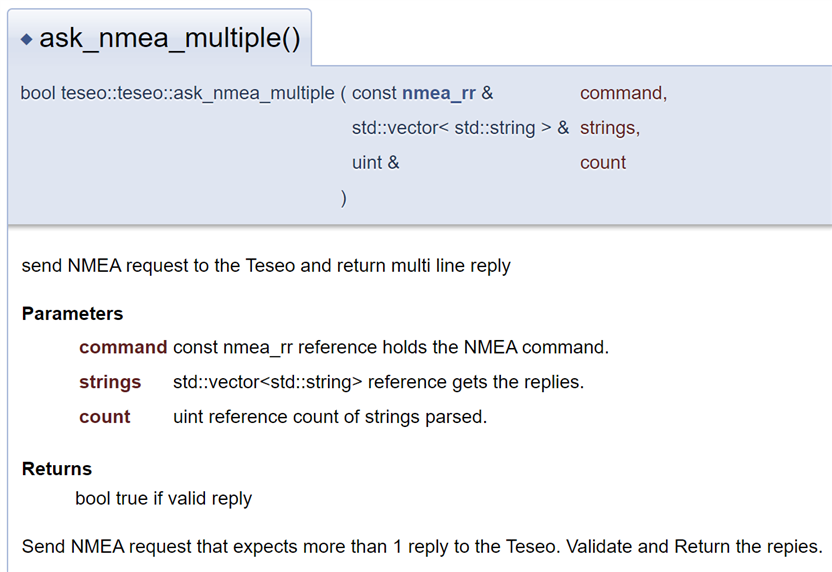
image: online API documentation, used throughout this post
Built-in NMEA commands
Commands that return a single reply
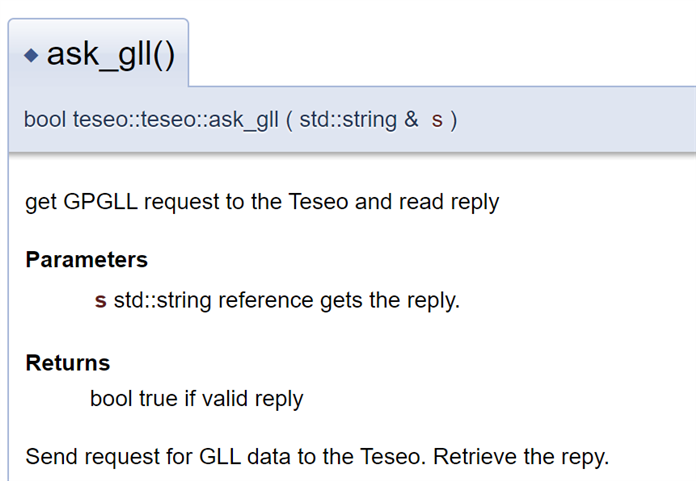
These single-reply commands are supported: GLL, RMC, GGA, VTG. You pass it a string object, that will be filled with the reply. The return value is a bool. True if the reply is complete and valid.
example:
std::string reply;
uint count; // intentionally uninitialised
bool valid; // intentionally uninitialised
valid = gps.ask_gll(reply);
printf("GLL valid: %s.\r\n", valid ? "yes" : "no");
printf(reply.c_str());
result:
GLL valid: yes.$GPGLL,5051.77054,N,00422.57581,E,070917.000,A,A*5B
Commands that return multiple replies
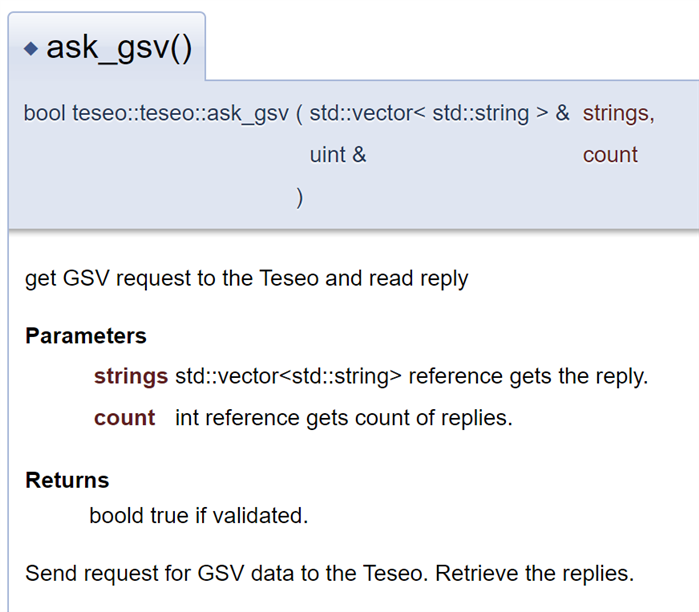
These multi-line-reply commands are supported: GSV, GSA. You pass it a vector of string object, that will be filled with the replies. And an unsigned int that will get the number of replies. The return value is a bool. True if the reply is complete and valid.
example:
std::vector<std::string> replies(NMEA_MAX_REPLIES);
uint count; // intentionally uninitialised
bool valid; // intentionally uninitialised
valid = gps.ask_gsa(replies, count);
printf("GSA valid: %s. count: %u.\r\n", valid ? "yes" : "no", count);
std::for_each(replies.begin(), replies.begin() + count, [](auto &s) {
printf(s.c_str()); });
result:
GSA valid: yes. count: 2.
$GNGSA,A,3,15,07,27,08,30,,,,,,,,2.0,1.3,1.5*25
$GNGSA,A,3,65,74,73,,,,,,,,,,2.0,1.3,1.5*2C
How to invoke other commands
You're not restricted to the supported commands. The teseo class allows you to send anything your heart desires. And you choose what you do with the answer. Get it as a raw std::string, get it split and validated by the class methods, ignore it, ...
The first 3 options below make it easy to call the remaining commands, with fairly high level support. In the last option, you get real low access.
Commands that return a single reply
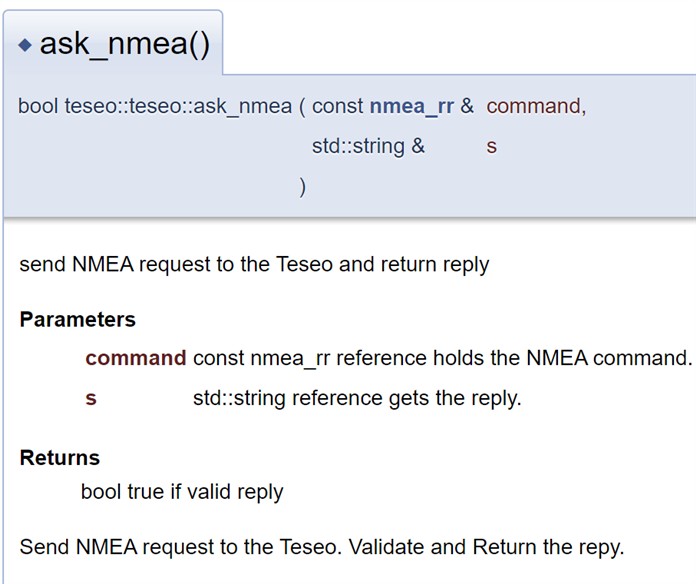
Define the command and validation strings. Then use the teseo::ask_nmea() method. It will interpret the returned stream, validate it and hand over the response data.
example:
// execute a custom command that returns one line
teseo::nmea_rr pstcmu("$PSTMNMEAREQUEST,800000,0\n\r", "$PSTMNMEAREQUEST,800000,0");
valid = gps.ask_nmea(pstcmu, reply);
printf("PSTMCPU valid: %s.\r\n", valid ? "yes" : "no");
printf(reply.c_str());
result:
PSTMCPU valid: yes.$PSTMCPU,51.49,-1,98*4A
Commands that return multiple replies
Define the command and validation strings. Then use the teseo::ask_nmea_multiple() method. It will interpret the returned stream, validate it and hand over the response data. It also reports the number of replies that are retrieved
Example:
The Dump Almanac functionality that I use here as example is slow. The GPS has to retrieve this information from backup memory and isn't fast at that. It's not a command you'd usually call, but I needed a multiline command that I hadn't used yet.
teseo::nmea_rr almanac("$PSTMDUMPALMANAC\n\r", "$PSTMDUMPALMANAC");
valid = gps.ask_nmea_multiple(almanac, replies, count);
printf("DUMPALMANAC valid: %s. count: %u.\r\n", valid ? "yes" : "no", count);
std::for_each(replies.begin(), replies.begin() + count, [](auto &s) {
printf(s.c_str()); });
result:
DUMPALMANAC valid: yes. count: 3.
$PSTMALMANAC,90,40,5a1409000046554920580b00aa9d00008a8f0600523b2c00eec03400fd78020004000000cf400000*79
$PSTMALMANAC,91,40,5b1409000046754a175a1b00a264070061010c00cb2b080120c0340006da020004000000cf400000*71
$PSTMALMANAC,92,40,5c1409000046854c02ec220064af090066430a00f42b0801acbf3400eecc020004000000cf400000*25
Commands that don't return a reply
You just create a std::string with the command, and call teseo::read(string). Terminate the string with an "\r\n" sequence.
The teseo::init() method has a few examples.
If you use this method for a command that actually returns a reply, you may have to add logic to discard that data from your communication channel (if it's buffered). The easiest way is to do a read anyway and then ignore what's returned.
For commands that just echo a status line, it's easier to use teseo::ask_nmea().
Going full custom
If none of the above scenarios fit your needs, you can write your own conversations using teseo::write() and teseo::read(), and interpret the results yourself.
You can even get lower level. You are the one that's providing the reader and writer that the teseo object will use. You can customise that - or completely replace it by your own implementation.
And: the teseo object does not own the communication channel. Your program does. It initialises it, and gives the teseo object a reader and writer. You can completely bypass the object if it fits your needs, and send / read raw data via the UART or I2C port. The class won't stop you and does not care. It doesn't keep state.
Where does it stop?
The class is not thread-safe. The underlying communication channel (the I2C or UART port that you control) is most likely not thread safe unless it's guarded. The GPS IC itself is not thread safe. If you use multi-threading or multitasking, guard the object just like you would protect a UART port. Reserve before a query and release when done.
Where next?
This library serves you NMEA formatted GPS data. You still need to get the information out of those NMEA response strings.
I created an MNEA parser library that works well with this Teseo driver (and with many other GPS APIs and brands): C++ parser library for NMEA GPS data - pt. 1: ideas, concepts, early design .
That library will create C++ objects for the NMEA replies, The data is transformed into meaningful data types and structures.

Next post: C++ library for ST Teseo GPS - pt. 7: 1.0 release with NMEA parser - stable
visit the github repository (git clone https://github.com/jancumps/pico_gps_teseo.git)
view the online documentation
Link to all posts.