


Week 9 - Oct 30 - Nov 5
This week I have planned to design and build module 2 & 3 in my trafficpredictor project. Check out the plan - Traffic Predictor #3 - The Plan and revisions, hardware & software list - Traffic Predictor #9 - Revisions and Hardware, Software list for a better understanding of the progress as I pause module 1 progress and shift to progress in module 2 & 3.
Module 2 - Auto-pilot mode with predefined speed using Sensor Expansion board
Module 3 - Speed adjustment with correspondence to current vehicular movement and real-time traffic
This module 2 title has been revised as above to "Auto-pilot mode with predefined speed". Please note in future I will be referring module 2 with the revised title.
Auto-pilot mode - term explained
The term Auto-pilot is used to refer the act of helping the driver/ rider of the vehicle at frustrating times of traffic by providing speed values. This will not mean or involve integrating an auto driving mechanism without a driver/ rider into a fossil fuel/ electricity-powered vehicle. The output from this module in my trafficpredictor project can be used to auto drive electric vehicles [After alterations in the electric vehicle].
Introduction
Module 2 & 3 have been integrated as one module as they both stand out to be similar in terms of functionality. Both are going to output or instruct the driver/ rider to maintain a particular speed. But they have minor difference in the way of gaining the output.
- Module 2 - Static speed output from predicted route
- Module 3 - Dynamic speed output from real-time traffic
Ultrasonic sensor to measure the speed
An ultrasonic sensor is used here to determine the distance of the moving/ static traffic objects from the vehicle. Using change in distance and time, the speed alteration required in order to avoid a collision can be calculated. The formula to do this would be,
The setup has Ultrasonic sensor [Range: 0 to ~75cm] mounted on a Servo motor which will move from 0 to 180 degrees. This will capture a semicircle RADAR like output as shown below [Processing IDE has been used to display output as graph]. Using this the speed with which the driver/ rider should proceed will be calculated.
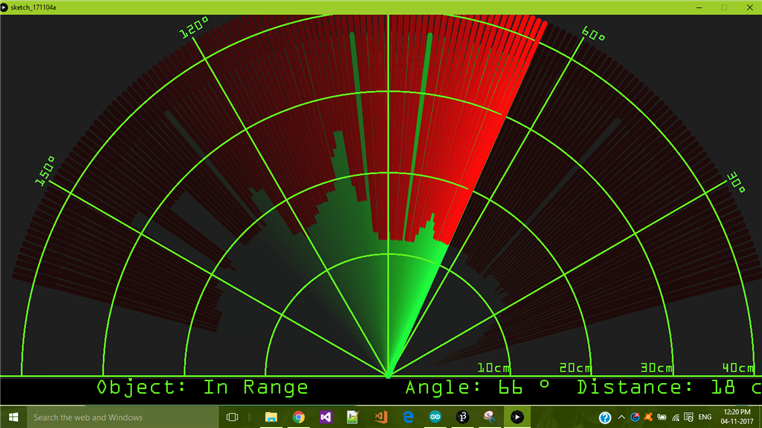
Processing IDE showing RADAR like output with input from Ultrasonic sensor
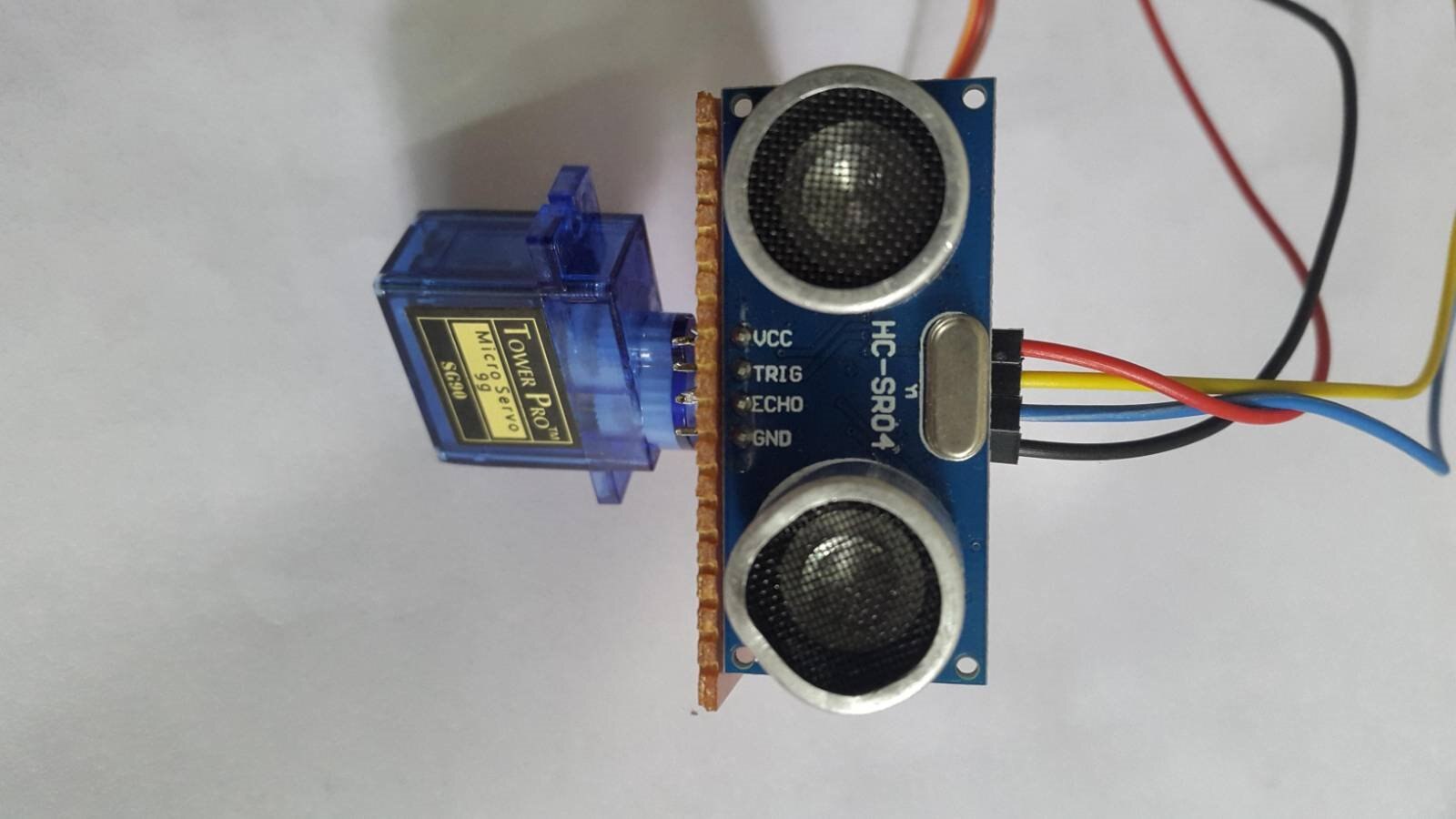
Ultrasonic sensor mounted on Servomotor
Hardware Explained - Video
The below video will explain the various hardware parts used for the entire trafficpredictor project. This has been achieved after a week's time of struggle with soldering, unit testing and integration of all the parts.
Do let me know your comments on the hardware build in terms for improvisation.
Progress made so far,
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||| 70%
| {tabbedtable} Tab Label | Tab Content |
|---|---|
| Entry & Introduction | IoT on Wheels Design Challenge - Traffic predictor and auto pilot mode |
| Plan | Traffic Predictor #3 - The Plan |
| Initial Setup | |
| Module 1 | Traffic Predictor #5 - Machine Learning and Building a case for the kit Traffic Predictor #6 - Into the traffic [Part 1 of 2] Traffic Predictor #7 - Into the traffic [Part 2 of 2] Traffic Predictor #8 - Predicting the best route to avoid traffic [Part 1 of 2] |
| Module 2 & 3 | This blog |
| Integration | Yet to Begin |
| Revisions and Hardware, Software List | Traffic Predictor #9 - Revisions and Hardware, Software list |

Top Comments