


Preliminary work
I removed the cabin of the truck and took out the windshield so I have more room for mounting the control hardware and power supplies on the truck.

I then tested the remote controlled car. It is in working condition. Car is powered by 5 AA batteries in series (7.5V). I made a couple of measurements: the two engines (direction and traction) are controlled by applying a 7.5V voltage directly to the engine. To reverse traction (forward/reverse) and steering (left/right), the polarity of the control voltage is changed.
I plan to use two independent power supply for the Arduino and the two engines:
- one 5V power bank to power up the Arduino Uno.
- one 6V power supply. (4 AA batteries in a plastic case with an on/off switch) to power up the two electric motors.
I disconnected the cables from the two motors and connected them to the 6V power supply. I measured the current through the engines: 460mA for the direction engine, 350mA for the steering engine. When powered from 6V the steering engine does not turn the wheel to the maximum steering angle but I think that the smaller steering angle might be enough for my robot. If a larger steering angle is needed, I will have to use a higher voltage power supply.
I would like to keep the existing female connectors on the engine wires so that I can restore the truck to its original condition, just in case future younger generations in my family would favor manual control over autonomous robot control for this toy truck. Luckily I found a matching set of male contacts in my parts box (no idea of type/brand) and built two pairs of cables to connect the engines to the Arduino driver shield.
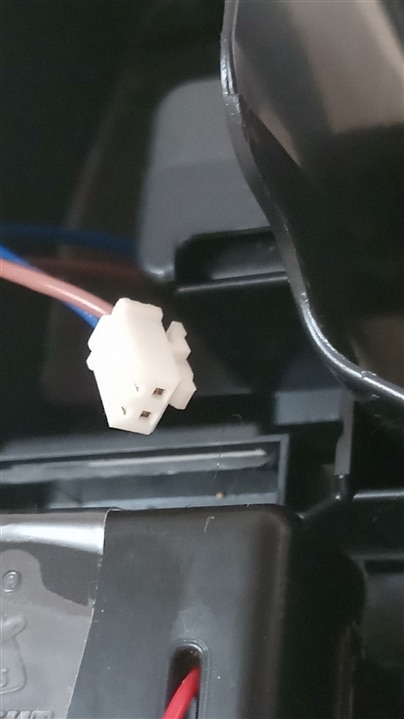
After the testing is completed, I will start using the connectors from the kit.
Testing
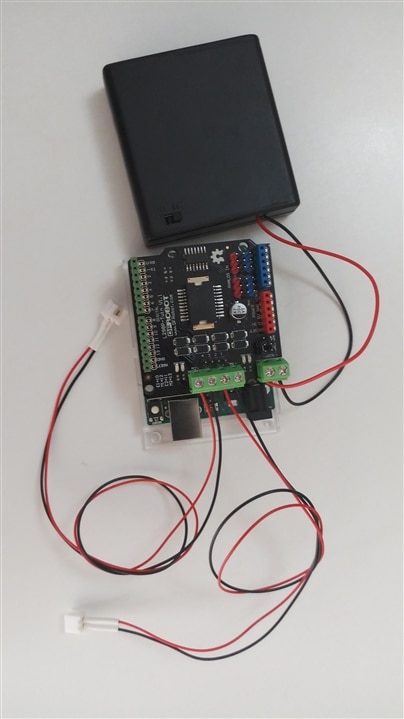
I plugged the DFROBOT DRI0017 shield into the Arduino Uno, connected the engines wires and the power supply to the shield.
I wrote an Arduino sketch that loops through this testing sequence:
- turn traction engine in forward mode for 3 seconds
- stop for 3 seconds
- turn traction engine in reverse mode for 3 seconds
- stop for 3 seconds
- turn steering engine right for 3 seconds
- stop for 3 seconds
- turn steering engine left for 3 seconds
- stop for 3 seconds
The following clip shows the testing sequence.
-

robogary
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

a33333
in reply to robogary
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

a33333
in reply to robogary
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children