


In this post, I am showing some picture I took during the build of the robot
1. The chassis
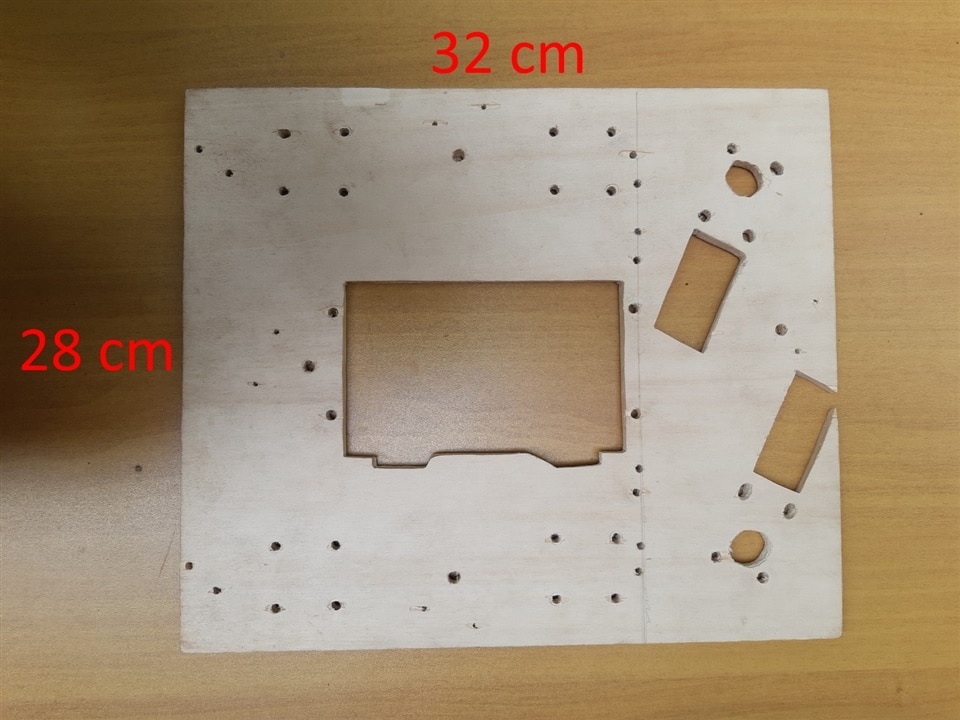
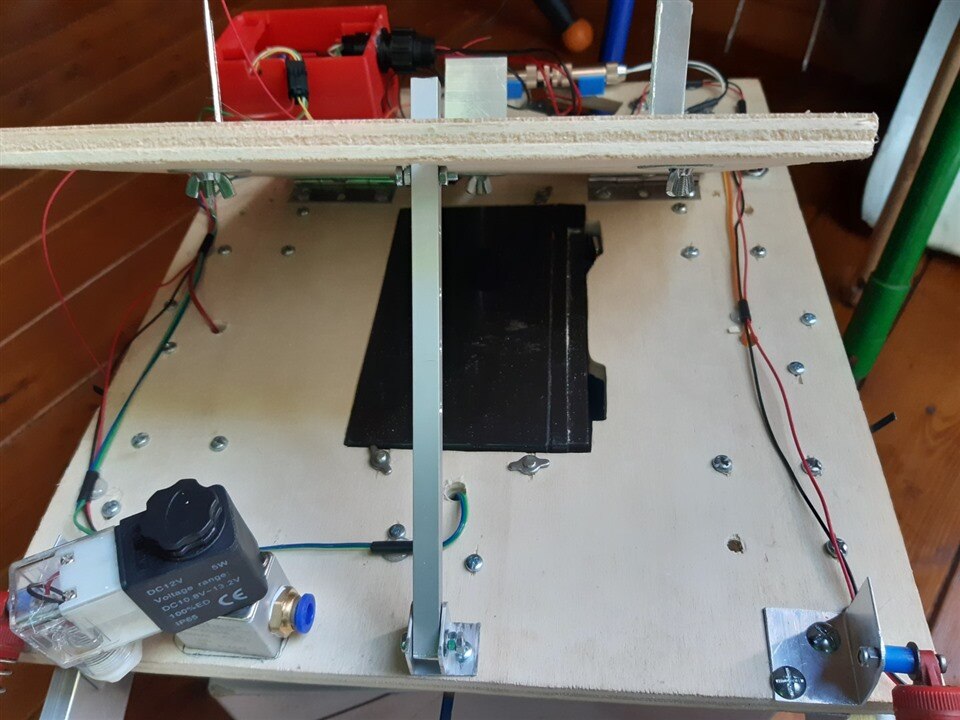
The robot chassis is made of 10 mm plywood. I cut out all the slots and holes to mount the robot components. To limit the total height, I also created a slot for the battery, so that it is aligned with the upper surface of the chassis
2. The caster wheels
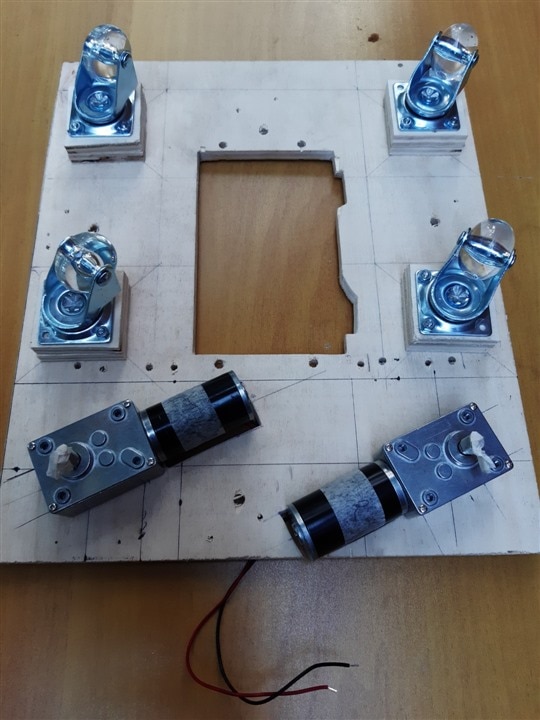
First, I mounted the caster wheels. I used some plywood to create some thickness so that I can fit the battery and there is enough clearance to climb over the PV module frames and joints

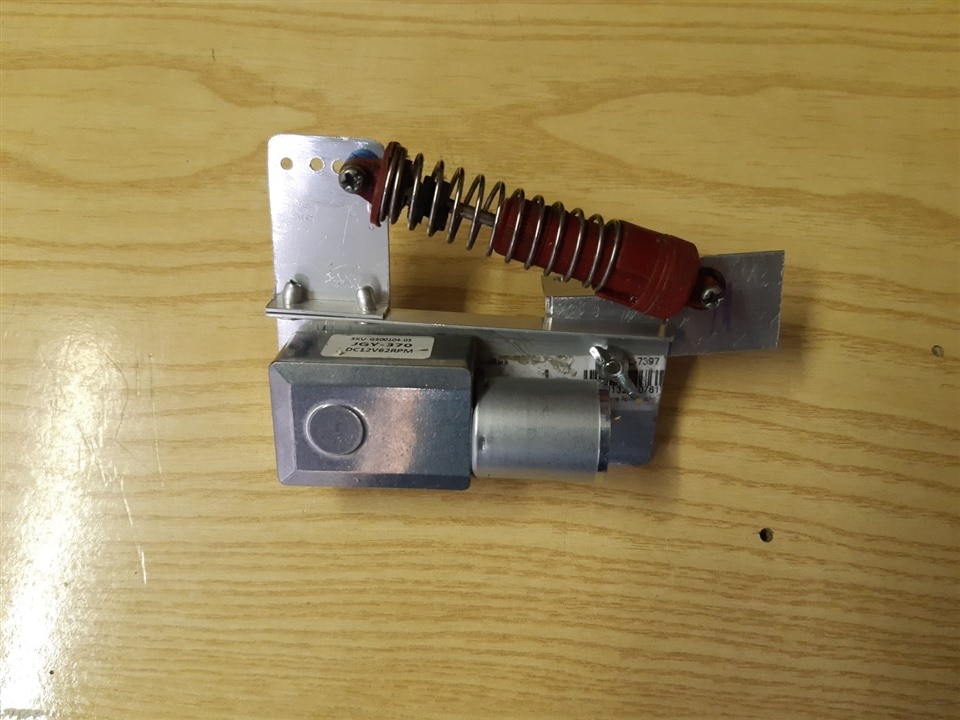
3. The motor
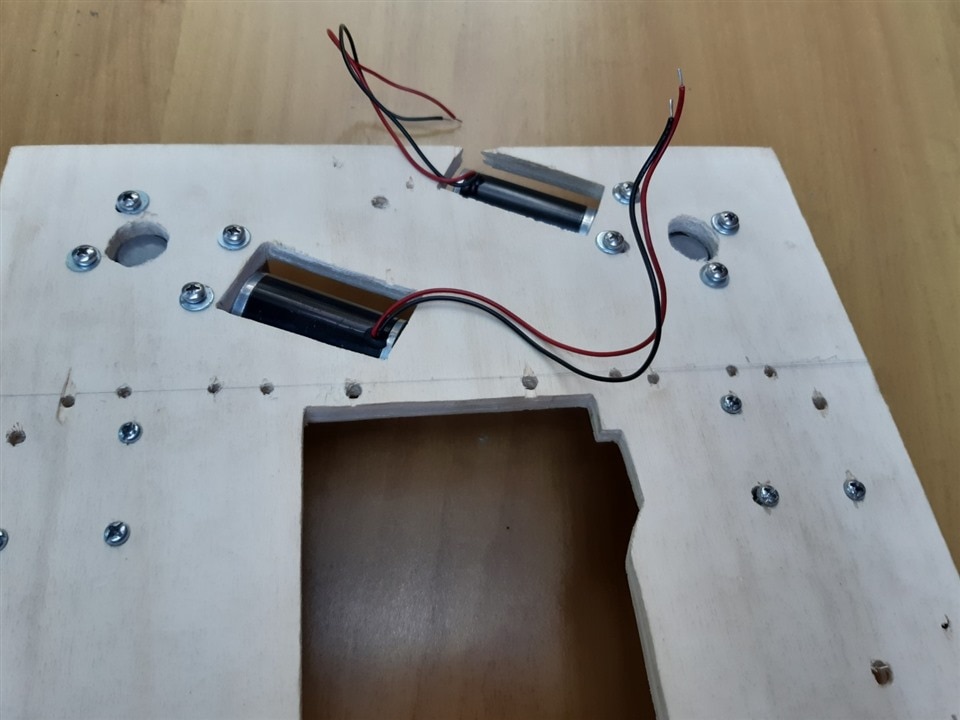
Next, I installed the two motors. I created some slots because the motor is a little higher than the gear reduction box
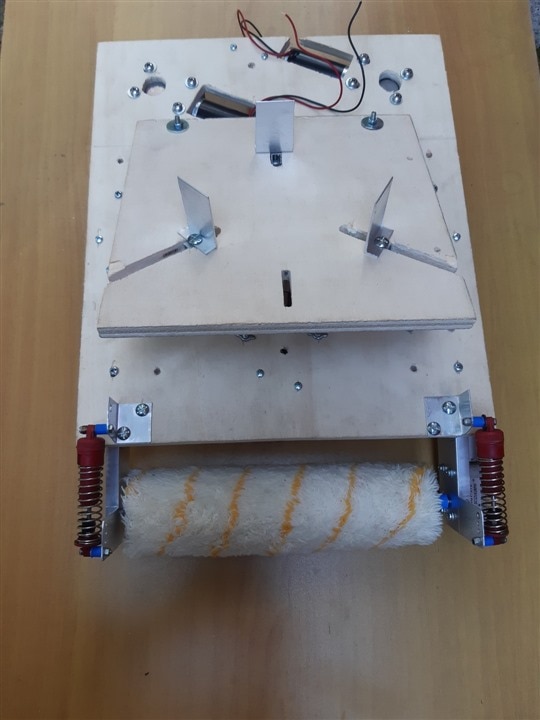
4. The limit switches
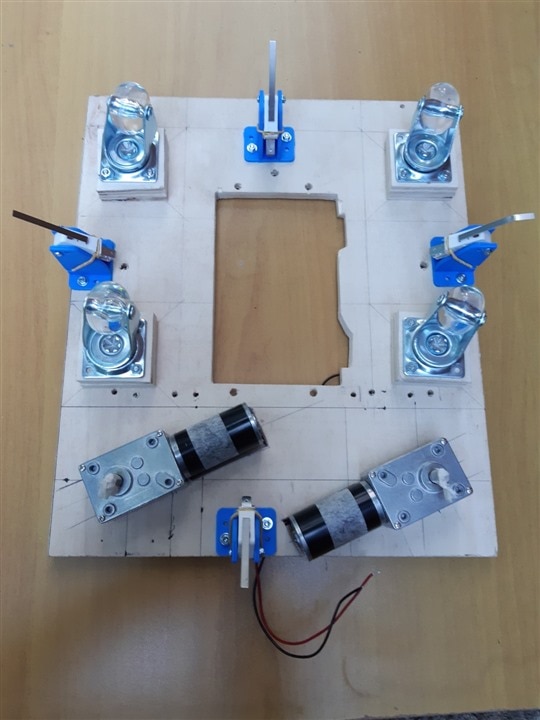
I installed the limit switches assembled in the 3D-printed supported on each of the four edges of the chassis
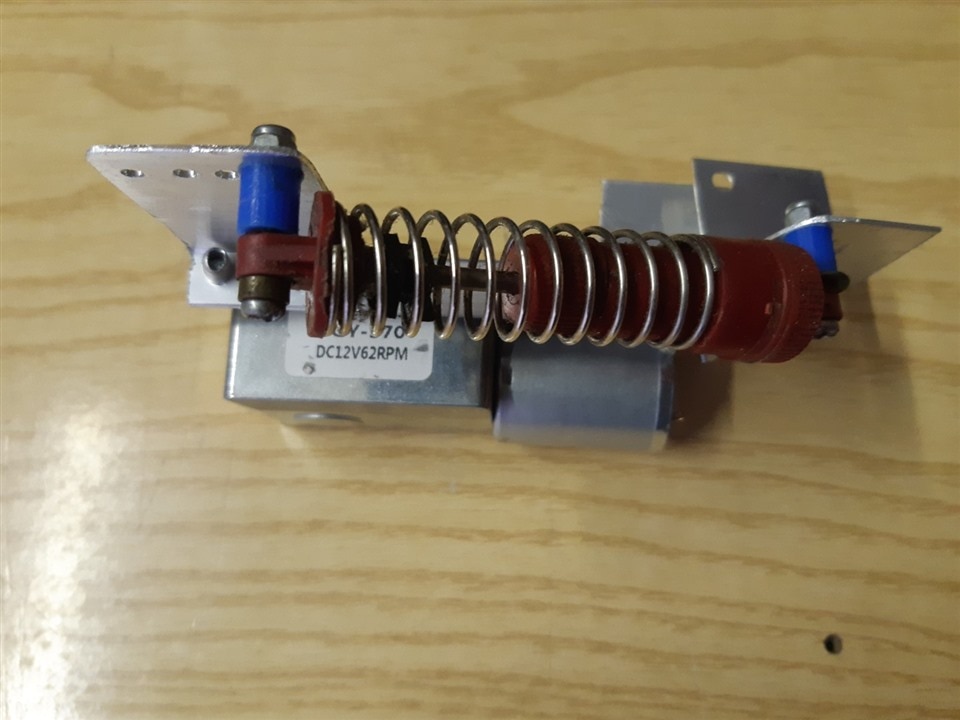
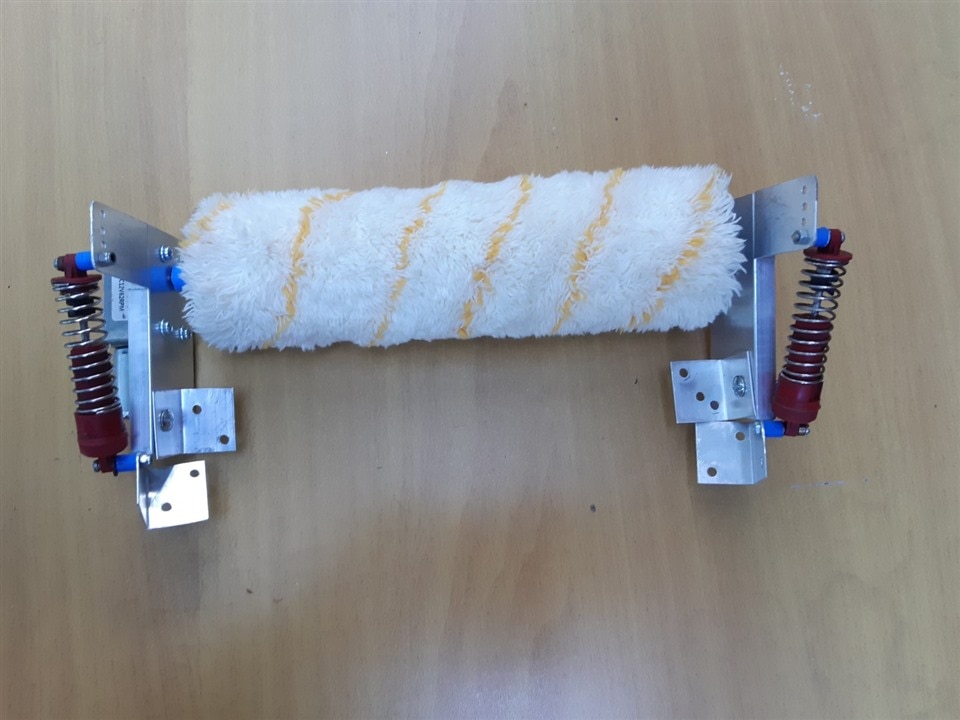
5. The roller
The roller has been mated to the motor by means of some 3D-printer adapters. Since the hole of the paint roller is 8 mm in diameter and the motor shaft is 6 mm in diameter, I choose a 6 mm aluminum bar and printed an adapter with an inner hole of 6 mm and an outer diameter of 8 mm. Then, I printed an adapter for the motor shaft to the 6 mm bar

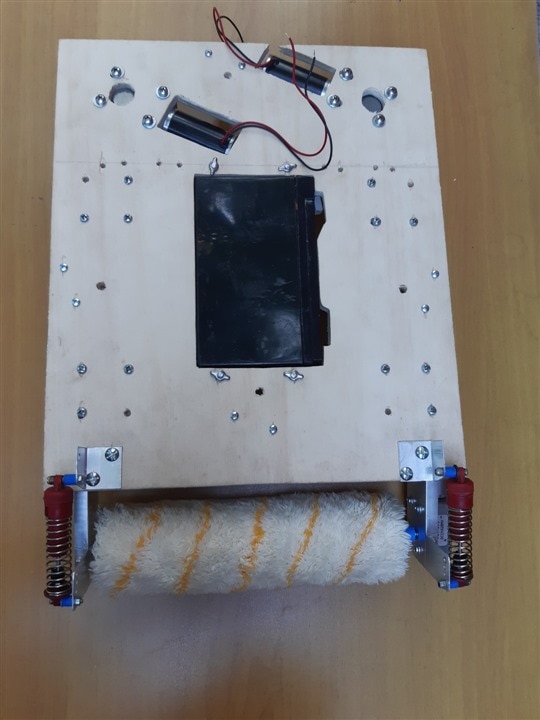
I created a support with L-shaped aluminum profile. I added a couple of shock absorbers, recovered from an old RC car. The shock absorber should be useful when an obstacle is hit by the paint roller


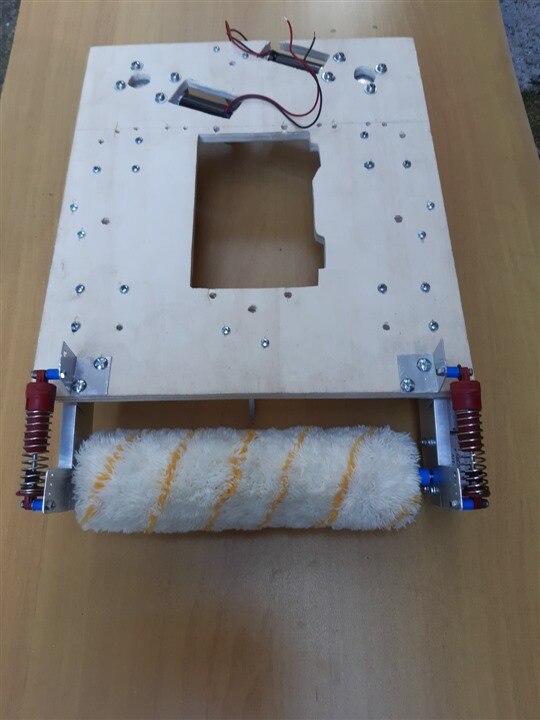
Here is the final sub-assembly of the roller
and here is the roller sub-assembly mounted on the main chassis
6. The battery
Next step is the installation of the battery. I used a 12V lead battery to keep costs down. Size and weight are relevant, so may be it would be a good idea to replace with a lithium battery. Battery can be installed and removed from the top of the chassis and is kept in place by two L-shaped aluminum bars with four long screws
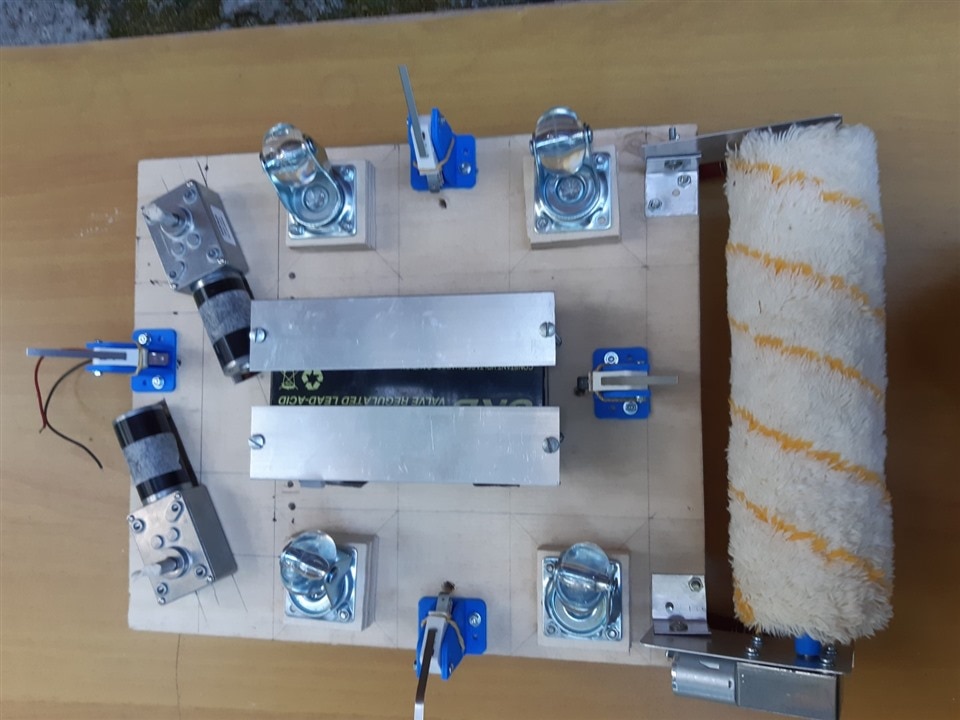
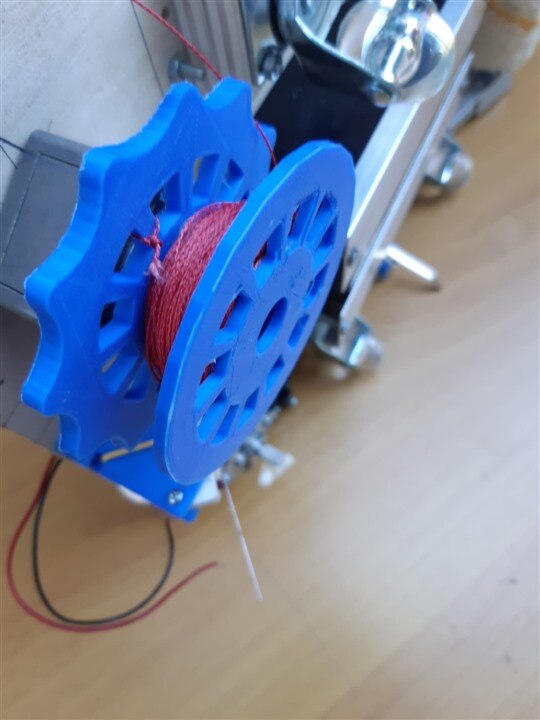
7. The pulleys
Next I installed the pulleys. Pulley are 3D-printed in the halves, and the glued together with a piece of plastic pipe to make the whole assembly more resistant





On the pulley, I winded about 15 meters of Dyneema rope, which is very thin (0.60 mm in diameter) but very strong (it can stand up to 50 kg)

8. Water tank and valve
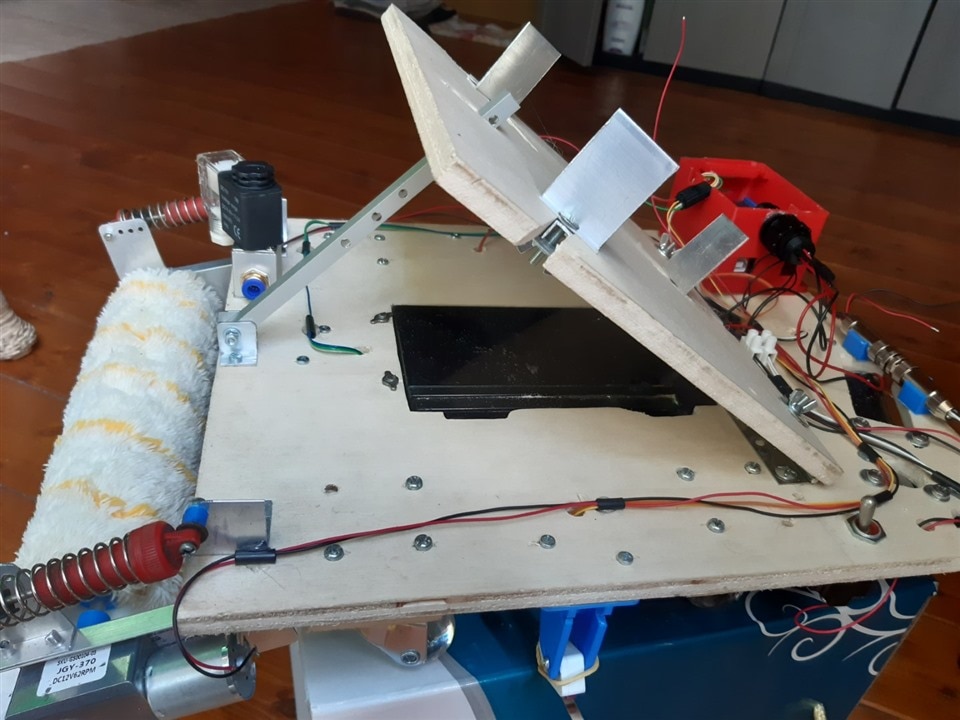
I installed the support surface for the water tank. It features three adjustable locks to hold the bucket. There is also a system to adjust to inclination of the support to match roof inclination and keep the bucket horizontal
9. Water dispenser
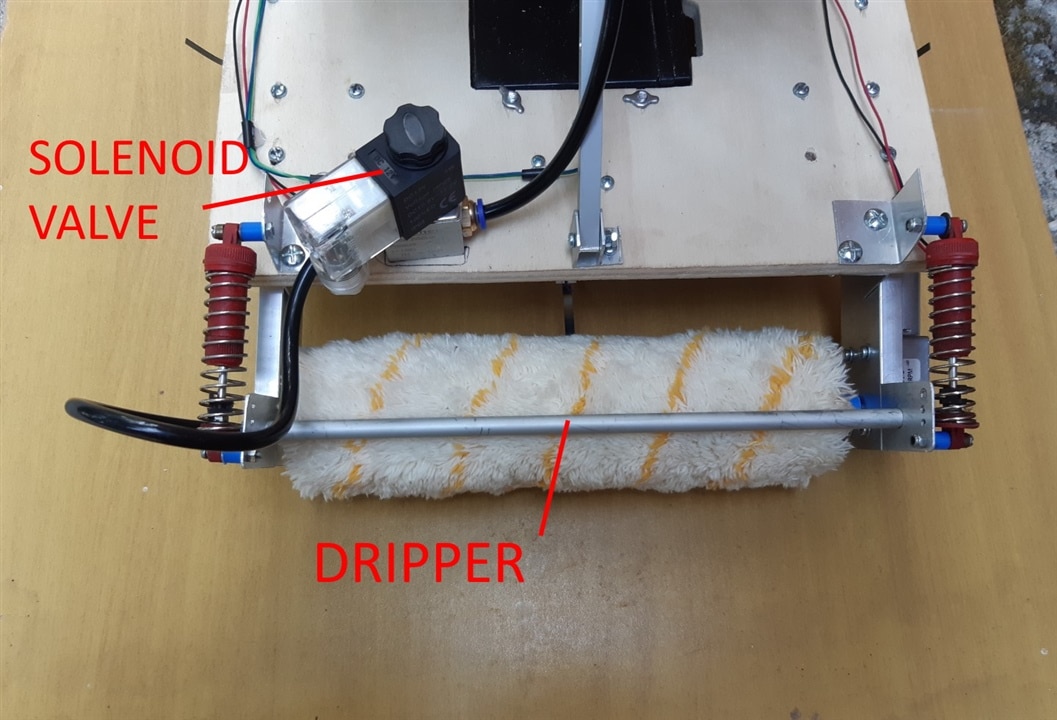
The paint roller is kept wet be means of a water dispenser, which is made up the following components
- water bucket
- solenoid valve
- water dripper
The water dripper is a round aluminum bar (8 cm in diameter) where I drilled some holes with a 1.5 mm tip to let water drip

The dripper has then been installed just above the roller and connected to the solenoid valve
9. Control board
Finally I installed all the wiring and the case with Arduino board and DFRobotic shield
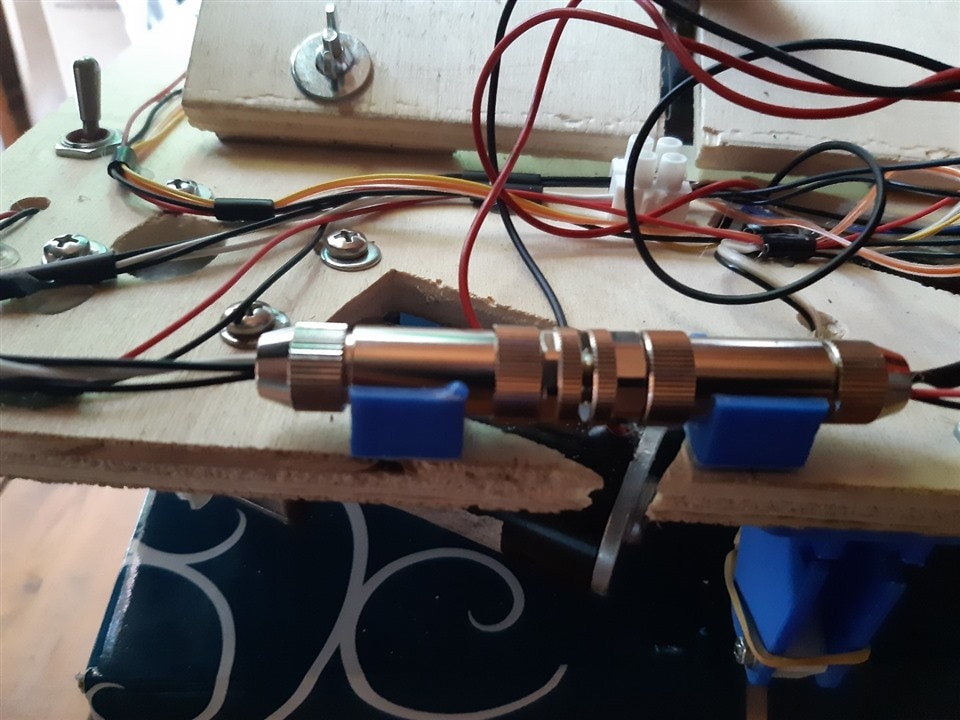
To provide two separate power supplies (one for the Arduino board and one for the DFRobotic shield), I connected the TE M8 connector as shown un pictures

M8 connector is hold in place be means of two 3D-printed supports

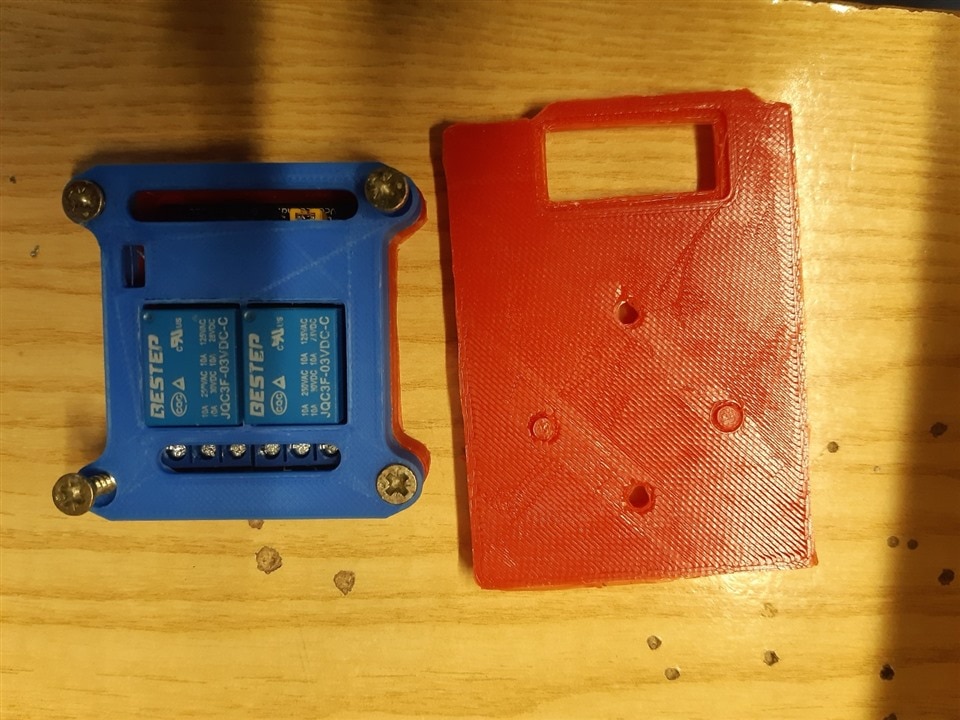
The boards are placed inside a case installed on the top left corner of the chassis
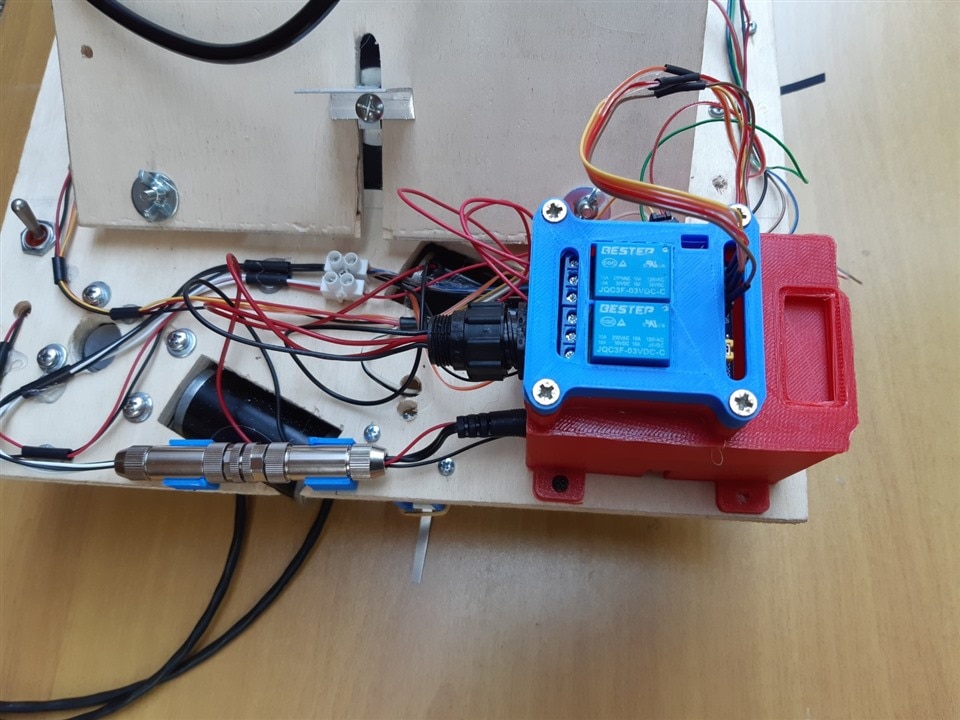
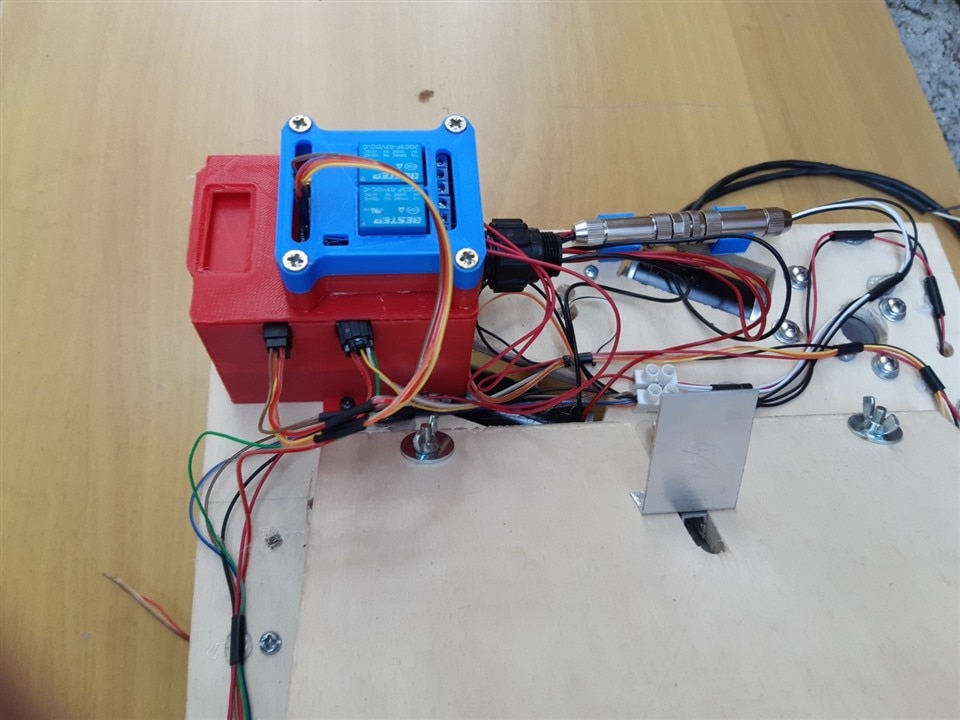
As you can see, the relays that drive the solenoid valve and the roller motor are glued to the cover of the case
Now I can start to make some tests and see what needs to be changed/improved.
|
Prev: Wiring |
Next: The software |



