


Since I made my Nano Sense 33 BLE based data logger for a water powered rocket, and subsequent amendment to hand thrown 'rocket' I have been trying to get my head around what the data from the on-board accelerometers (x, y, z) is actually showing (Nano Rocket #1 : Hand Thrown with TTL Serial Communications and Nano Rocket #2 : An Accelerating Truck ). There have been many helpful comments from members and I will be following some of the advice given (sorry, I forget who advised what, but thanks to you all) and I have gradually come to realise that I have been confusing acceleration with velocity, as well as trying to understand other 'real world' acceleration effects such as vibration from wheels and so on.
So I decided to try some calibration experiments instead and I have started with straight forward static acceleration on a table, see the video below:
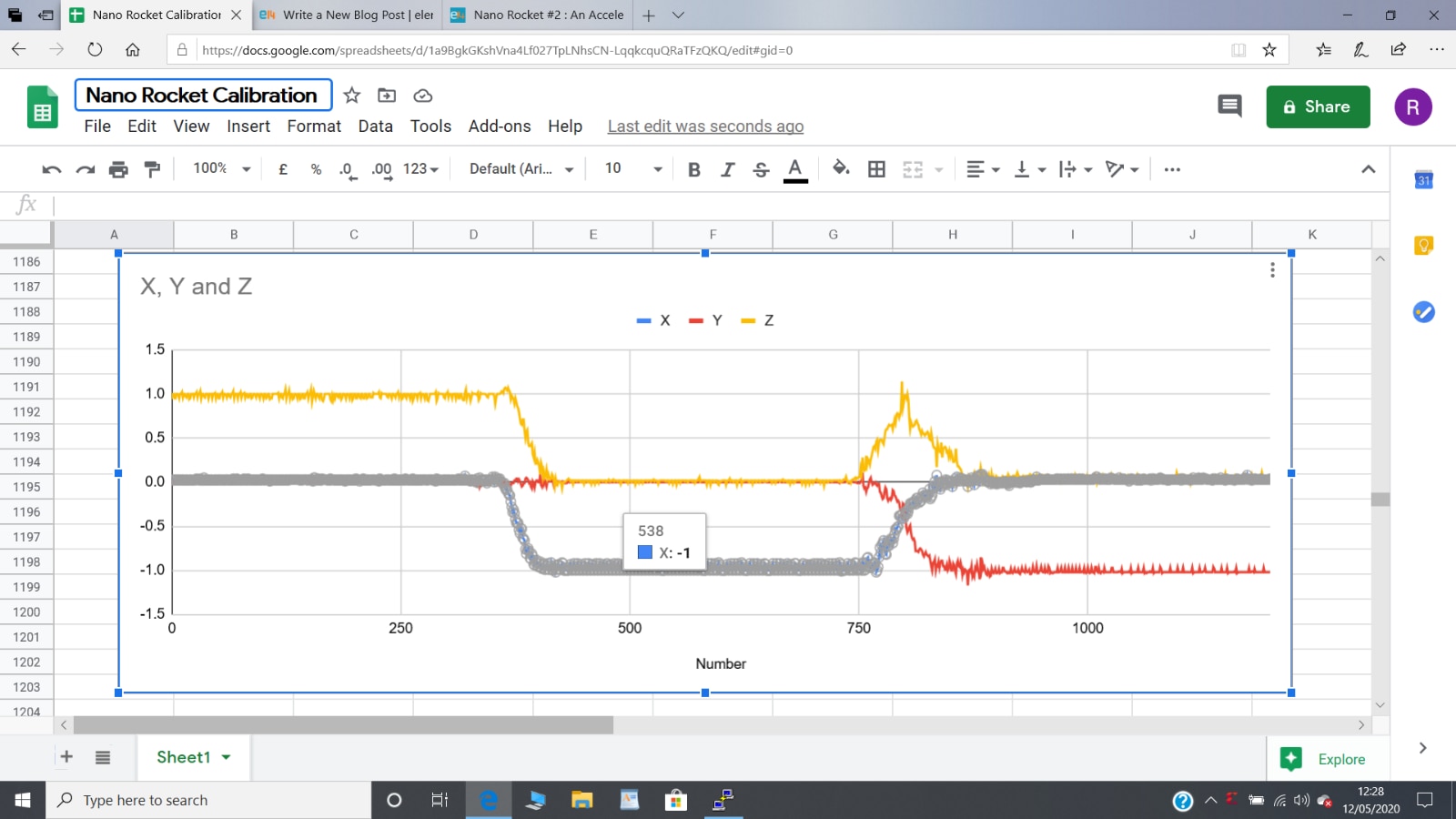
Then, as before, I connected the rocket to a USB - serial converter module and downloaded the data into Putty, and then cut-and-pasted it into Google sheets and obtained the following graphs, showing highlighted X, Y and Z traces.
X Trace Highlighted
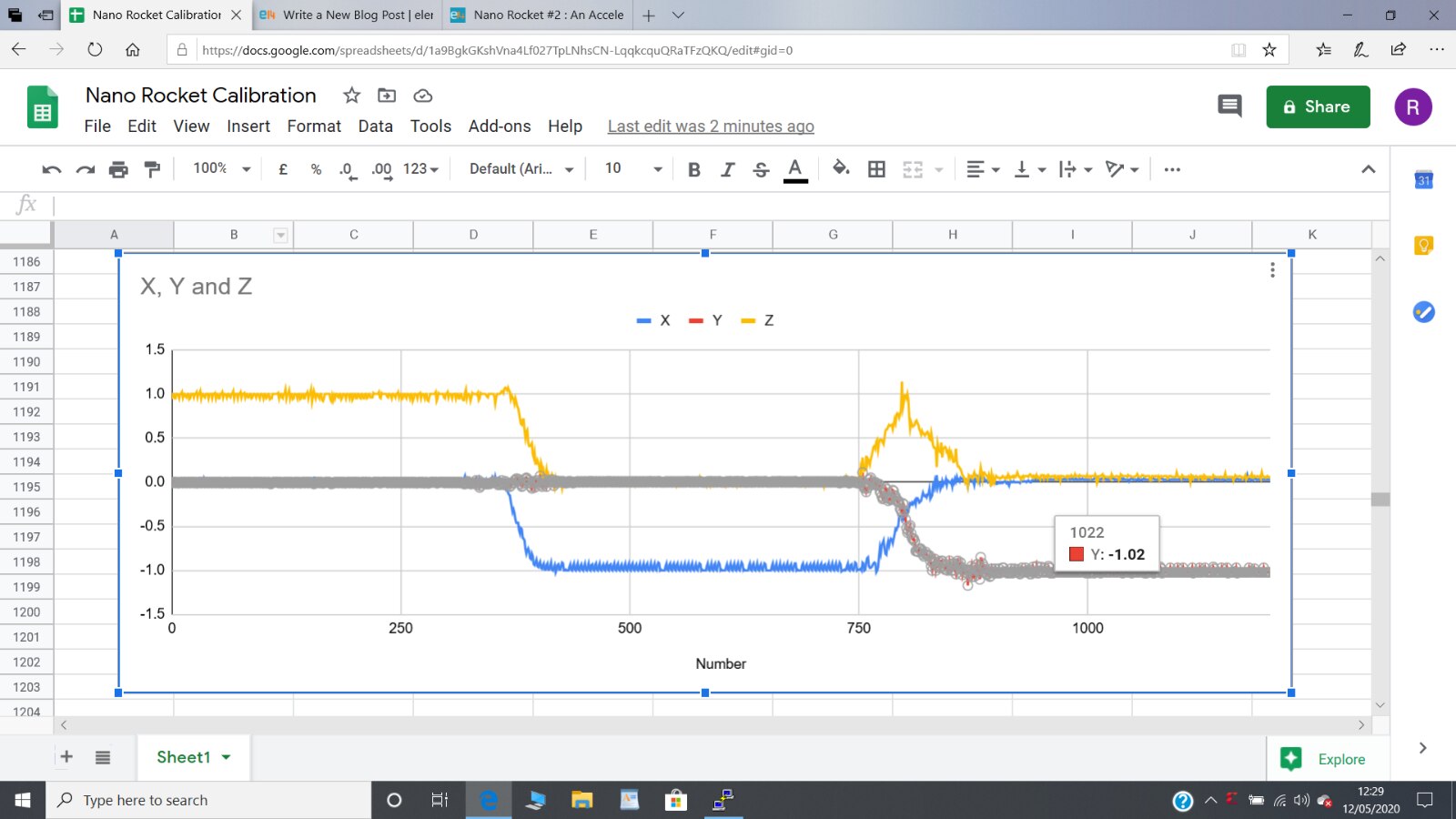
Y Trace Highlighted
Z Trace Highlighted
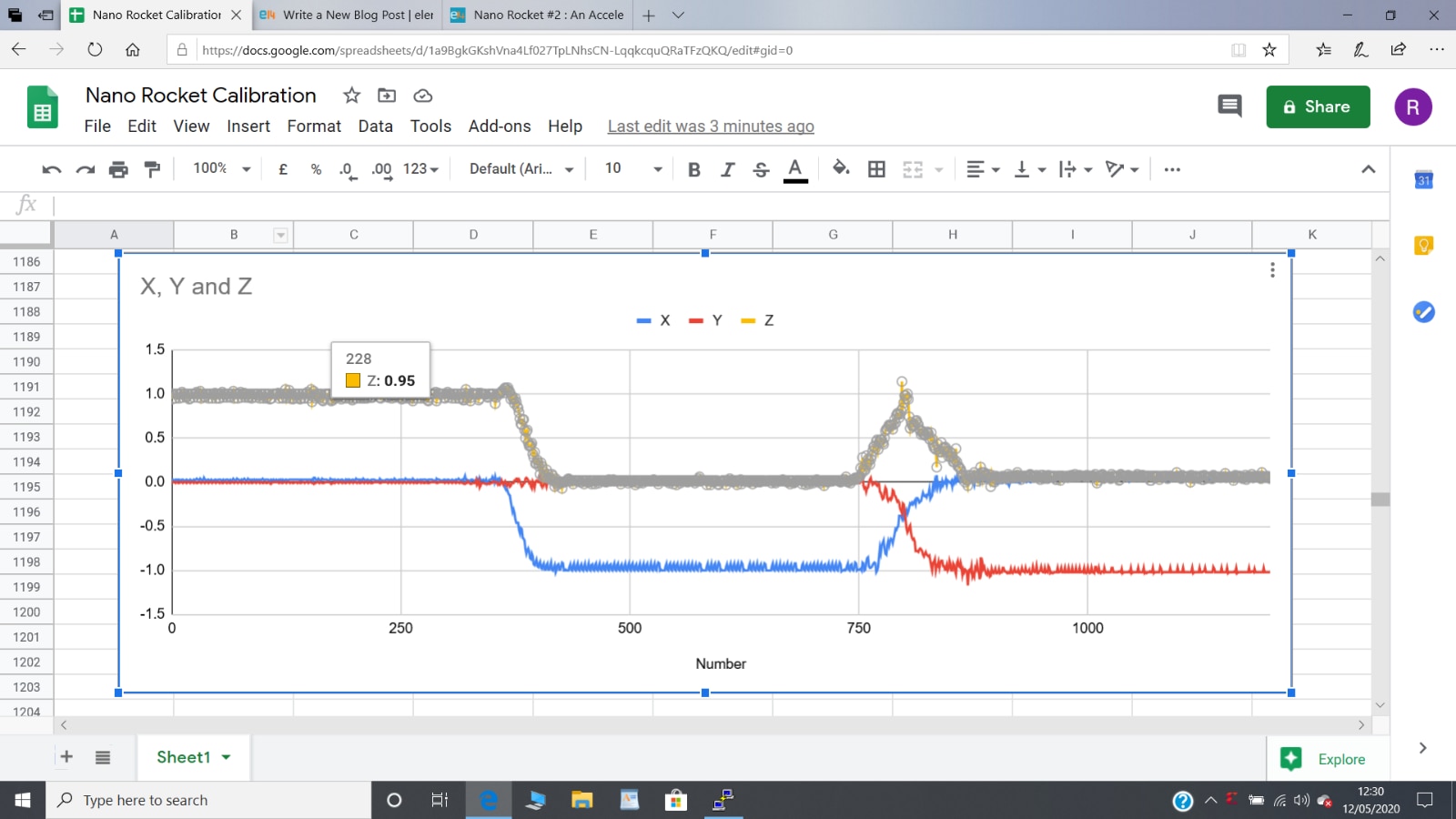
Apart from a little bit of noise which could be vibration from the laptop fan, or other external sources, the only acceleration being applied is that due to gravity, in the downward direction. The output from the accelerometers is 1 g = 1.0 and this can be seen in all three traces. In the X trace the value is zero until the middle third (when the rocket was turned on end) and has a value of -1.0. This would have been +1.0 if I had stood the rocket on the other end but that is rounded and much more difficult to maintain in an upright position. The Y trace also shows a -1.0 in the final third of the graph which is when the rocket was held on it's side. If the other side had been used it would have been +1.0. These first two traces show a simple transition from one orientation to another, but the Z trace shows a much more interesting output. The Z trace in the first third shows a +1.0 value, as gravity is accelerating downwards. At the second reorientation two thirds of the way along there is peak as the rocket is rotated and illustrates an acceleration followed by a deacceleration.
Armed with this calibration data I decided to throw the rocket straight upwards so that only the Y value should show any acceleration and X and Z should be constant at 0.0. Let's see if this is correct and that I am able to throw the rocket directly upwards. So, time for some tea and a sit outside in the sunshine, then some throwing!
A few technical issues intervened in the sitting in the sun, drinking tea, collecting data scenario: it was nearly lunch time so I went without the tea, plus the sun went in so there was no sitting. Also, perhaps more importantly, because I was throwing the rocket directly upwards, or mostly directly upwards, it meant it came almost directly down and as I have mowed the lawn, there was very little buffering and the rocket hit quite hard, causing a power reset. After some additional packaging and repeated attempts I managed to obtain the following data.
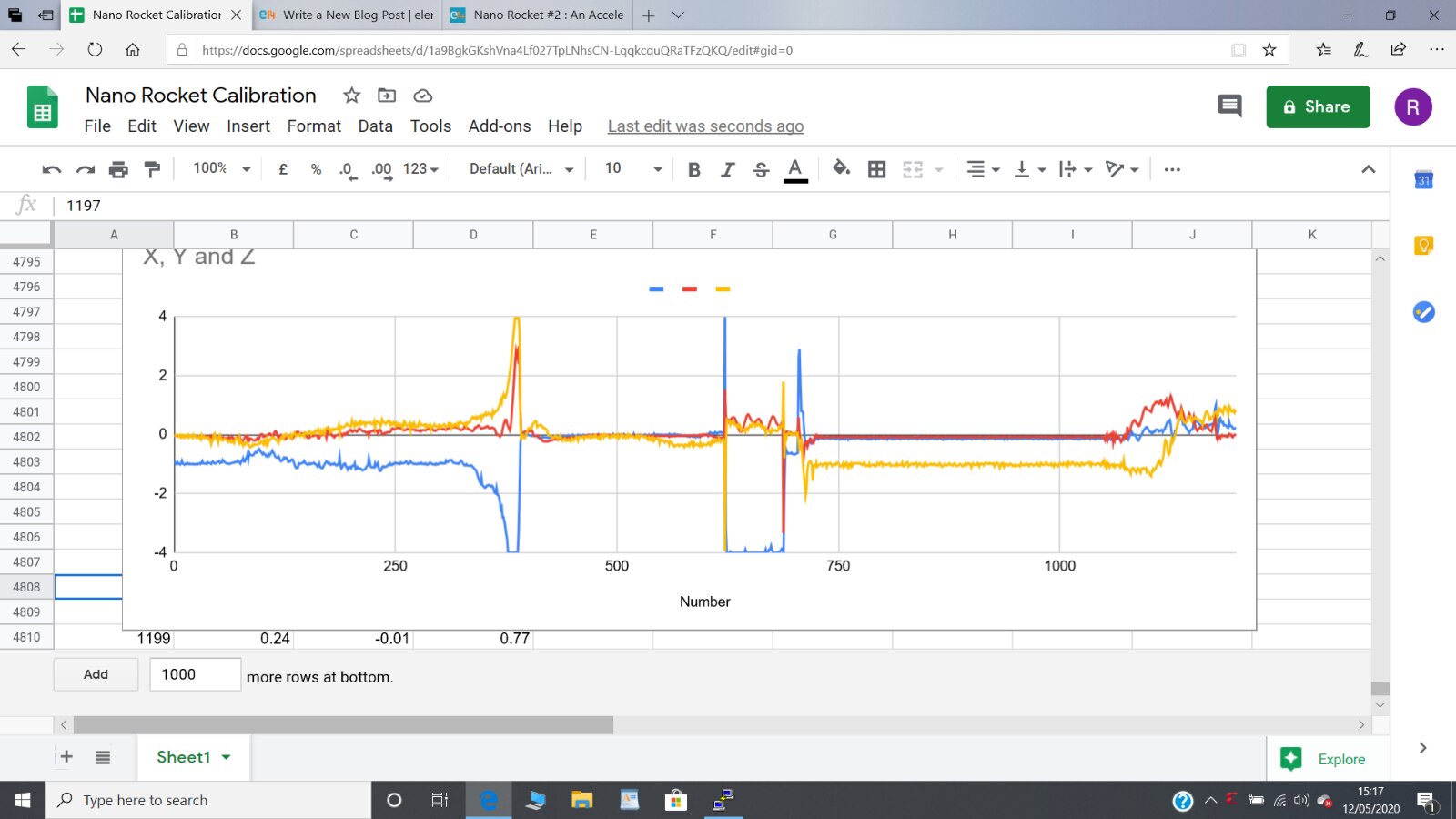
It still looks confusing but I started the rocket pointing directly upwards in order to obtain the -1.0 (approximately) on the X trace, as seen in the previous calibration traces. I then threw the rocket as directly upwards as I could manage, indicate by the spikes at sample number 325 (approx.). At this point there is no force acting on the rocket so all traces show 0. At sample number 625 (approx.) the rocket hits the ground and there is a considerable deacceleration period, possibly due to the casing flexing as it absorbs the force of impact, followed by some further rapid accel/de-accel periods as the rocket bounced into the flower bed. There is then a long static period and then some further variations as I picked up the rocket.
As it is rather confusing having all three traces plotted together, I have just plotted the X trace on it's own and the process outlined above becomes much clearer.
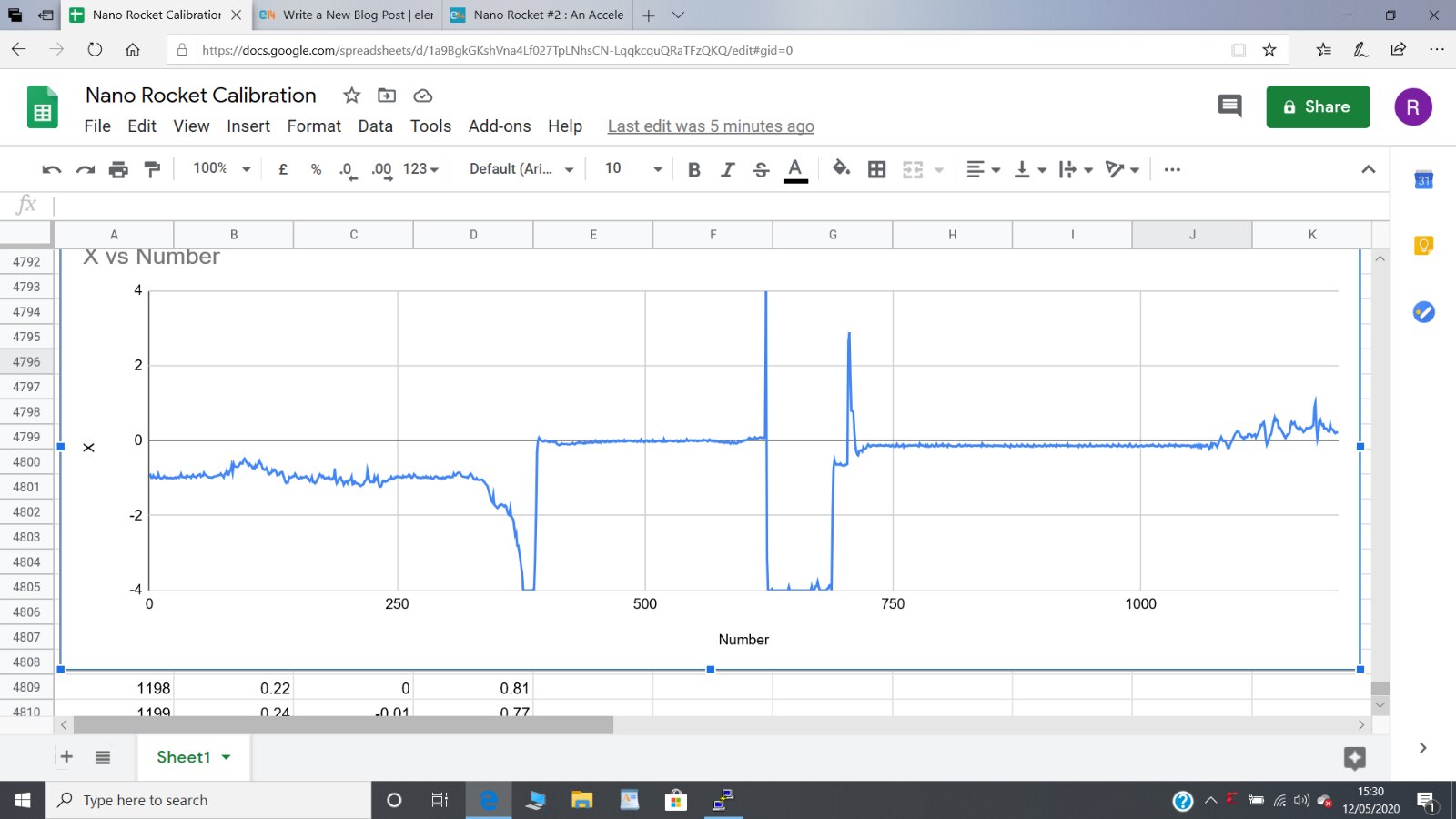
I am not quite convinced that I fully understand what is happening as I would expect to see acceleration due to gravity in the period between launch and hitting the ground, but perhaps that is due to a flaw in my understanding of how gravity works or the sensor does not detect gravity when in free flight.
It would have been more intersting to have fitted this system to a real water rocket as this would have provided a much better 'upwards' acceleration effect, but overall, the results are good.
Dubbie
Top Comments
-

dougw
-
Cancel
-
Vote Up
+3
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

beacon_dave
in reply to dougw
-
Cancel
-
Vote Up
+1
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

dubbie
in reply to beacon_dave
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

beacon_dave
in reply to dubbie
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
-

dubbie
in reply to beacon_dave
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

dubbie
in reply to beacon_dave
-
Cancel
-
Vote Up
+2
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children