


You know your an Engineer when this combination of ICONS means something exciting



So a few of you may already have seen the video and post regarding using the DAC8734 from TI with the Raspberry PI so you will know what this is all about, for those that have not, you can see it here: Raspberry PI 2.0, Windows 10 and how to drive the DAC8734 from TI (AKA the DAC8734EVM Road test Board)
For those whome have not and or are interested in Interfacing the Arduino to this wonderful chip, lets begin
OK, so it’s been a busy week learning, researching and creating sample content for the Arduino, Launchpads and Raspberry PI, to drive the DAC8734 Quad 16bit DAc from Texas Instruments. you can find the others in seperate posts in this community
I have been learning about this chip for a few weeks and when I realized it was going to be part of a Road test I decided to clean up some of my test code and make a blog out of it to help others and in particular the road testers. this task was made more difficult because of the seeming lack of information outside of the actual datasheet for the chip which can be found here; http://www.ti.com/lit/ds/symlink/dac8734.pdf
I also want to be clear The Road test is about the I don’t have the DAC8734EVMDAC8734EVM to hand but I do have a DAC8734 Chip and mounted one on a breakout board and created my circuit on a breadboard but there is nothing I am aware of that will prevent any of my software attached from working on the EVM without change
Here is my breadboard version and a view of some of the other end of the wires going to the Arduino UNO


This is the EVM module from the Road test, even though the chip is on an evaluation PCB with two VREFS and a bunch of switches, there should be no difference in operation of the software
,

if your wiring to this then you will need to connect the SPI lines and power to the J2A pins (Right hand side of the EVM)
If you jumper J2.2 to J2.8 and J2.6 to J2.12 then after the SPI and power is connected, the board will work with my software in the same way.
The DAC8734 stands out from many other DACs in that is can output upto +20V in unipolar mode and +10 to - 10 in Bipolar mode, this coupled with the 16Bit resolution and less than 1 bit error after calibration makes this DAC an Ideal candidate for my Power Supply project,
Here is a complete list of its features

The dac consists of 4 analog outputs, a couple of GPIO pins, VREF inputs and the usual set of communications and power pins, here is a block diagram and a mode detailed drawing of one channel


One really cool thing to note here that is also fairly unique among DACs is the Zero and Gain registers, these allow the engineer to actually tune the zero offset of each individual DAC channel and also change its gain. this permits the engineer to not have to worry about software calibration that involves adjusting the actual Binary value being output to the DAC data registers, instead they can leverage the complete range of values (65535) for the best resolution. By making the jumper connections I listed above allows the engineer to also control the mode of operation for group A and B between Bipolar and Unipolar operation, rather then using the onboard switches or hard wiring it
To say there were not any issues that I still have not resolved would be wrong. This is not a critical issue but on the PI and according to the DAC8734 PDF, the chip is supposed to work in SPI Clocking MODE1 where the data is changed on the rising edge of the clock and then latched into the DAC on the falling edge and this works perfectly on the PI (Once I figured that out  )
)
when I initially coded the cleaned up Arduino sketch, I set it to the same mode and it did not work. It was working before i tried to set any mode and simply accept the default, and I wrongly assumed that it was operating in Mode 1... wrong
Here is the timeing diagram from the PDF

the trace from the working RPI code

and this is what I had to use to get the Arduino working... just weird as the PDF has no mention of being able to reliably work this way... im still investigating

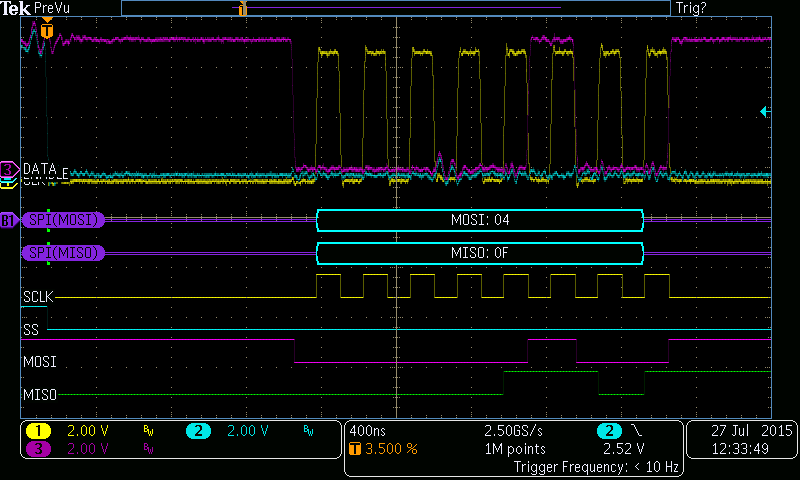
If anyone has any ideas, please let me know and I will try it out, for now be aware that you may also need to operate the DAC in this mode, even though it seems to be wrong (Yes I did adjust the Oscilloscope triggering correctly.. I thought of that )
For accuracy I was impressed but I have no means currently to measure the full accuracy of this DAC but I have my name in the hat too for the road test so we will see. For now I will simply say that i was able to tune it to within 2 digits on my 4.5Digit DMMs but the DAC is way better than that so I wont show measurements here as they will serve no point. I do have operational test measurements shown in the PI video and I will be creating a video for this DAC too, its just not ready yet
So lets look at the software. First let me say, I have tried to make it compatable with both the Arduino and the Launchpads and so far I have succeeded. there is an assumption that in all cases, where a board has a SS (Slave Select) defined, I have used it. this is all of the boards tested so far including the Arduino so here is the pinout I used for the Arduino
basically 10 is Chip select, 11 is MOSI (Master Out, Slave In), 12 is MISO (Master In, Slave Out) and 13 is the clock. this is all in hardware on the Arduino UNO with the exception of the SS pin that you still need to cotrol seperatly
OK, the code will be attached to this post as a complete sketch but below I will break it down as I go through its operation
The first section upto the area identified as // DAC8734 code starts here is standard stuff to do with reading the serial port, parsing the commands and a few buffers, all previously described in my earlier videos and posts
the part following is where we start into the DAC code
//********************************************************
// DAC8734 code starts here
//********************************************************
// PICK THE RIGHT chip select for the right board
#define DAC_8734_CS_PIN SS // All the boards tested so far has this pin defined and it is in a consistent place on the expansion headers
#define VREF 5.000
// Default values below assume 0-10V Unipolar or -5 to +5 bipolar output
#define DAC_VFSR VREF*2 // may be 0 - 10 or -5 to +5
#define DAC_8734_Command 0 // command register
#define DAC_8734_DataBase 0x04 // register offset to zero cal base register
#define DAC_8734_CalZeroBase 0x08 // register offset to zero cal base register
#define DAC_8734_CalGainBase 0x0C // register offset to gain cal base register
#define DACMAX 0xFFFF
#define DACMIN 0x0000
// default setup of DAC8734, these can be adjusted if needed, some functions also change them to change mode etc.
int DAC_Gain0 = 0; // 0 = *2, 1 = *4
int DAC_Gain1 = 0; // 0 = *2, 1 = *4
int DAC_Gain2 = 0; // 0 = *2, 1 = *4
int DAC_Gain3 = 0; // 0 = *2, 1 = *4
int DAC_GPIO0 = 1; // 1 = Group A in Unipolar 0=Bipolar (External connection to control pin)
int DAC_GPIO1 = 1; // 1 = Group B in Unipolar 0=Bipolar (External connection to control pin)
int DAC_PD_A = 0; // 1 = group A power down
int DAC_PD_B = 0; // 1 = group B power down
int DAC_DSDO = 0; // 1 = Disable SDO bit.
// set up the speed, data order and data mode
// See https://www.arduino.cc/en/Reference/SPI for more details
#ifdef Arduino
// not available on energia yet
SPISettings settingsDAC8734(5000000, MSBFIRST, SPI_MODE0);
#endif
// Sine table, used to create a reasonable sinewave on a dac output, 256 16bit values, one complete cycle
byte val = 0;
unsigned int Sin_tab[256] = { 32768, 33572, 34376, 35178, 35980, 36779, 37576, 38370, 39161, 39947, 40730, 41507, 42280,
43046, 43807, 44561, 45307, 46047, 46778, 47500, 48214, 48919, 49614, 50298, 50972, 51636,
52287, 52927, 53555, 54171, 54773, 55362, 55938, 56499, 57047, 57579, 58097, 58600, 59087,
59558, 60013, 60451, 60873, 61278, 61666, 62036, 62389, 62724, 63041, 63339, 63620, 63881,
64124, 64348, 64553, 64739, 64905, 65053, 65180, 65289, 65377, 65446, 65496, 65525, 65535,
65525, 65496, 65446, 65377, 65289, 65180, 65053, 64905, 64739, 64553, 64348, 64124, 63881,
63620, 63339, 63041, 62724, 62389, 62036, 61666, 61278, 60873, 60451, 60013, 59558, 59087,
58600, 58097, 57579, 57047, 56499, 55938, 55362, 54773, 54171, 53555, 52927, 52287, 51636,
50972, 50298, 49614, 48919, 48214, 47500, 46778, 46047, 45307, 44561, 43807, 43046, 42280,
41507, 40730, 39947, 39161, 38370, 37576, 36779, 35980, 35178, 34376, 33572, 32768, 31964,
31160, 30358, 29556, 28757, 27960, 27166, 26375, 25589, 24806, 24029, 23256, 22490, 21729,
20975, 20229, 19489, 18758, 18036, 17322, 16617, 15922, 15238, 14564, 13900, 13249, 12609,
11981, 11365, 10763, 10174, 9598, 9037, 8489, 7957, 7439, 6936, 6449, 5978, 5523, 5085, 4663,
4258, 3870, 3500, 3147, 2812, 2495, 2197, 1916, 1655, 1412, 1188, 983, 797, 631, 483, 356, 247,
159, 90, 40, 11, 1, 11, 40, 90, 159, 247, 356, 483, 631, 797, 983, 1188, 1412, 1655, 1916, 2197,
2495, 2812, 3147, 3500, 3870, 4258, 4663, 5085, 5523, 5978, 6449, 6936, 7439, 7957, 8489, 9037,
9598, 10174, 10763, 11365, 11981, 12609, 13249, 13900, 14564, 15238, 15922, 16617, 17322,
18036, 18758, 19489, 20229, 20975, 21729, 22490, 23256, 24029, 24806, 25589, 26375, 27166,
27960, 28757, 29556, 30358, 31160, 31964
};
//Calibration table, you will need to adjust these values to suit your build
int DAC_CAL_tab[8] = { 0x08, 0xfF, 0x0F, 0x4F, 0x3f, 0x80, 0x80, 0x80}; // zero's then gain's
// The DAC8734 uses Mode 1 SPI, has an 8 bit address byte followed by 16bit data
// high byte first, high bit first
// This is the register descriptions
// Reg description
// 0 Control Register
// 1 Monitor
// 2 Not Used
// 3 Not Used
// 4 DAC 0 Data Register
// 5 DAC 1 Data Register
// 6 DAC 2 Data Register
// 7 DAC 3 Data Register
// 8 DAC 0 Zero Cal Register
// 9 DAC 1 Zero Cal Register
// a DAC 2 Zero Cal Register
// b DAC 3 Zero Cal Register
// c DAC 0 Zero Gain Register
// d DAC 1 Zero Gain Register
// e DAC 2 Zero Gain Register
// f DAC 3 Zero Gain RegisterThis section defines loads of constants, register offsets and a SINE table for fun waveform generation, it is all configured in support of the DAC and I will walk through it in more detail in the pending video
All of the code has been heavily commented to make it easier to understand and extend. I have deliberatly NOT made a library yet as I want this to be as simple as possible for the reader to understand
now we start into real code for the DAC
At its core, WriteDACRegister function does everything or more specifically is the only unction that actually initiates communications with the SPI bus and the DAC chip, all the other functions end up here, so if you have issues, this is a good place to put debug statements
// the most basic function, write to register "reg", with a value "val"
void WriteDACRegister(byte reg, unsigned int val)
{
#ifdef Arduino
SPI.beginTransaction(settingsDAC8734); // ensures the SPI bus is in the right mode for this device irrespective of other devices used in the code
#endif
digitalWrite(DAC_8734_CS_PIN, LOW); // Select the Chip
SPI.transfer(reg); // Select the target register
SPI.transfer(val >> 8); // Send the High Data Byte
SPI.transfer(val & 0xFF); // Send the Low Data Byte
digitalWrite(DAC_8734_CS_PIN, HIGH); // Release the Chip
#ifdef Arduino
SPI.endTransaction();
#endif
}it is very simple, it takes an 8bit register offset and a 16 bit value and sends it to the DAC via the SPI bus, register value first, followed by high Byte of value, then the low byte. A point to note in this function if the ifdef statements, these are compiler directives that are used if you set the Arduino Definition at the top of the code to active, the Arduino will work fine without it but this allows you to more easily change the speed of the bus and its mode, if for some reason you have more than one device on the bus with different operating modes, to read more, look here: https://www.arduino.cc/en/Reference/SPI
Now we have the DAC initialization, this simply takes all the "int" variables at the top of the DAC code, ors them all together shifting the bits as needed to create the command word to setup the DAC.The default I have currently is both Group A and B are powered up and running in Unipolar mode with a 2X gain
// Setup a default DAC using the variables set above
// note the variables can be chaned then recall InitDac to change mode
// of operation of the DAC
// Currently set to Unipolar, 2* Gain and Powered up
void InitDAC()
{
// for now, gain of 2, gpio hiZ,
int DAC_INIT = 0x0000 | DAC_PD_A << 12 | DAC_PD_B << 11 | DAC_GPIO1 << 9 | DAC_GPIO0 << 8 | DAC_DSDO << 7 | DAC_Gain3 << 5 | DAC_Gain2 << 4 | DAC_Gain1 << 3 | DAC_Gain0 << 2 ;
Serial.print("Command Reg = "); Serial.print(DAC_INIT, HEX); Serial.print(" "); Serial.println(DAC_INIT, BIN);
WriteDACRegister(DAC_8734_Command, DAC_INIT);
}
now we have Calibrate DAC, this function simply outputs an 8*16 bit table to the Zero and Gain registers of the DAC. when you try it, you will need to adjust the values of this table to suit your own DAC, have a read of the PDF here fo more details: http://www.ti.com/lit/ds/symlink/dac8734.pdf page 19.
//Output the Calibration table to the DAC for all channels
void CalibrateDAC()
{
for (int x = 0 ; x < 4 ; x++)
{
WriteDACRegister(DAC_8734_CalZeroBase + x, DAC_CAL_tab[x]) ;// Zero cal
WriteDACRegister(DAC_8734_CalGainBase + x, DAC_CAL_tab[x + 4]); // Gain cal
}
}
Another simple function that abstracts the DAC values from knowing the register offsets etc
// Helper Function to output to a specified DAC, a Desired value between 0 and 65535
// this could represent 0V - 10V or -5 to +5V depending on mode
void SetDAC( byte channel, unsigned int value)
{
if (channel > 3)
{
Serial.println("DAC must be 0 - 3");
}
else
{
//Serial.print("DAC "); Serial.print(channel); Serial.print(" Value "); Serial.println(value, HEX);
WriteDACRegister(DAC_8734_DataBase + channel, value);
}
}This simply takes a DAC value between 0 and 3 along with a 16bit value, performs a quick check on the DAC id and adds the DAC base register value to it and forwards it to the WriteDACRegister function
Now is a fun function, this itterates through the SineTable above and outputs each value in turn to the DAC, there are 256 values in the table, and the routine will send out each complete set upto the number provided as the value in the call, this can be from 0 to 65535 (A long time if you go there ). the first parameter simply selects the DAC channel you want to output the value to.
// Simple itteration through the sine table above to simulate a sinewave
// you can change the table contents above to send whatever wave shape you want
void sine( byte channel, unsigned int loopcount)
{
if (loopcount > 65535) loopcount = 65535;
if (channel > 3) channel = 0;
Serial.print("Sine on DAC ");Serial.print(channel ); Serial.print(" Cycles= ");Serial.println(loopcount);
for (int y = 0 ; y < loopcount ; y++)
{
for (int x = 0 ; x < 256 ; x++)
{
SetDAC(channel, Sin_tab[x]);
}
}
Serial.println("Complete");
}
This one should be self explanatory
// Send to Serial port the Help Menu
void help()
{
// Print some pretty instructions
Serial.println("DAC8734 Test Program:");
Serial.println("Peter Oakes, July 2015\n");
Serial.println("Commands:");
Serial.println("help\" for this menu" );
Serial.println("dacx x is from 0 to 3, value 0 to 65535" );
Serial.println("bpA or bpB mode Bipolar");
Serial.println("upA or upB mode Unipolar" );
Serial.println("offA or offB Power Off group A or B" );
Serial.println("onA or onB Power On for Group A or B" );
Serial.println("sinex cycles, x is DAC from 0 to 3, cycles 0 to 65535" );
Serial.println();
Serial.println("make sure \"NewLine\" is on in the console setup" );
}
The setup and loop functions are very basic and self explanatory too
//********************************************************
// Standard Arduino / Energia setup() and loop() functions
// do not delete
//********************************************************
void setup()
{
Serial.begin(115200);
// print the help menu for the DAC8734 tester
help();
// setup the chip select pin for the DAC
pinMode(DAC_8734_CS_PIN, OUTPUT);
SPI.begin();
SPI.setDataMode(SPI_MODE0);
// Initialisze the DAC8734
InitDAC();
// output the DAC_CAL_tab to the DAC
CalibrateDAC();
// set the DAC outputs to Zero
SetDAC(0, 0x0000);
SetDAC(1, 0x0000);
SetDAC(2, 0x0000);
SetDAC(3, 0x0000);
}
void loop()
{
// see if there is a command come in on the serial port and if so call the command processor
if (CheckSerial()) DoCommand(inputBuffer);
}
Well OK, loop is a little strange for some of you. A long time ago i created several tutorials on how to read the serial port and parse the strings into usable commands with a single parameter. the statement in the loop simply chaecks the serial function to see if a command has arrived (Signified by he receipt of a newline character and if one is found, it sends it to the "DoCommand" function where all the magic happens. You can see the POST here if you want more information on how it works etc, Fast Track to Arduino Programming - Lesson 3 pt 1, Improved Parsing and memory usage (Fully working programs) and here Fast Track to Arduino Programming - Lesson 2, parsing the serial input into usable commands
here is the code anyway to complete the sketch
//********************************************************
// UTILITY FUNCTIONS TO MAKE LIFE EASY
//********************************************************
/*
Checks the serial input for a string, returns true once a '\n' is seen
users can always look at the global variable "serialIndex" to see if characters have been received already
*/
boolean CheckSerial()
{
boolean lineFound = false;
// if there's any serial available, read it:
while (Serial.available() > 0) {
//Read a character as it comes in:
//currently this will throw away anything after the buffer is full or the \n is detected
char charBuffer = Serial.read();
if (charBuffer == '\n') {
inputBuffer[serialIndex] = 0; // terminate the string
lineFound = (serialIndex > 0); // only good if we sent more than an empty line
serialIndex = 0; // reset for next line of data
}
else if (charBuffer == '\r') {
// Just ignore the Carrage return, were only interested in new line
}
else if (serialIndex < serialbufferSize && lineFound == false) {
/*Place the character in the string buffer:*/
inputBuffer[serialIndex++] = charBuffer; // auto increment index
}
}// End of While
return lineFound;
}// End of CheckSerial()
// Enhanced Command Processor using strtok to strip out command from multi parameter string
boolean DoCommand(char * commandBuffer)
{
Serial.println("Command");
char* Command; // Command Parameter
char* Parameter; // Additional Parameter
unsigned int analogVal = 0; // additional parameter converted to analog if possible
// Get the command from the input string
Command = strtok(commandBuffer, commandDelimeters); // get the command
Parameter = strtok(NULL, commandDelimeters); // get the parameter if any
//if there are more than one parameter they will be ignored for now
// Make sure we have an analog value if we are to allow PWM output
unsigned int outparameter = isNumeric (Parameter);
//if it is a number then convert it
if (outparameter)
{
analogVal = atoi(Parameter);
// check the analog value is in the correct range
if (analogVal < DACMIN || analogVal > DACMAX) outparameter = false;
}
// Standard way to handle commands
if (strcmp(Command, "help") == 0) { help(); }
//DAC Outputs if we have a valid analog parameter
else if (strcmp(Command, "dac0") == 0 && outparameter ) { SetDAC(0, analogVal);} // Set the DAC 0 output
else if (strcmp(Command, "dac1") == 0 && outparameter ) { SetDAC(1, analogVal);} // Set the DAC 1 output
else if (strcmp(Command, "dac2") == 0 && outparameter ) { SetDAC(2, analogVal);} // Set the DAC 2 output
else if (strcmp(Command, "dac3") == 0 && outparameter ) { SetDAC(3, analogVal);} // Set the DAC 3 output
//Sine Wave Outputs
else if (strcmp(Command, "sine0") == 0 && outparameter ) { sine(0,analogVal);} // Set the DAC 3 output
else if (strcmp(Command, "sine1") == 0 && outparameter ) { sine(1,analogVal);} // Set the DAC 3 output
else if (strcmp(Command, "sine2") == 0 && outparameter ) { sine(2,analogVal);} // Set the DAC 3 output
else if (strcmp(Command, "sine3") == 0 && outparameter ) { sine(3,analogVal);} // Set the DAC 3 output
// UNIPOLAR
else if (strcmp(Command, "upA") == 0 ) { Serial.println("Setting UniPolar Group A"); DAC_GPIO0 = 1; InitDAC(); }
else if (strcmp(Command, "upB") == 0 ) { Serial.println("Setting UniPolar Group B"); DAC_GPIO1 = 1; InitDAC(); }
// BIPOLAR
else if (strcmp(Command, "bpA") == 0 ) { Serial.println("Setting BiPolar Group A"); DAC_GPIO0 = 0; InitDAC(); }
else if (strcmp(Command, "bpB") == 0 ) { Serial.println("Setting BiPolar Group B"); DAC_GPIO1 = 0; InitDAC(); }
// Power Down
else if (strcmp(Command, "offA") == 0 ) {Serial.println("GrpA Off "); DAC_PD_A = 1; InitDAC(); }
else if (strcmp(Command, "offB") == 0 ) {Serial.println("GrpB Off "); DAC_PD_B = 1; InitDAC(); }
// Power Up
else if (strcmp(Command, "onA") == 0 ) { Serial.println("GrpA On"); DAC_PD_A = 0; InitDAC(); }
else if (strcmp(Command, "onB") == 0 ) { Serial.println("GrpB On"); DAC_PD_B = 0; InitDAC(); }
// Catch All
else { Serial.print("Error "); Serial.println(commandBuffer); }
return true;
}// Utility function to make sure the string is a numneric one
int isNumeric (const char * s)
{
while (*s)
{
if (!isdigit(*s)) return 0;
s++;
}
return 1;
}
and basically thats it. If you thought it was going to be tough to use this DAC, I hope now you have other ideas. Feel free to use theis sketch as you please, provide feedback and any bugs you find and perhaps even feture requests ??, who knows what I may choose to do but one thing for sure, this is a nice little DAC with a lot of possibilities and I look forward to using it on future projects.
as soonas you load the sketch and attach the console it should print out the help screen telling you the commands available, I hope you find it useful, I will be creating a video to go with this and if I improve the code and add more features I will post that too.


