


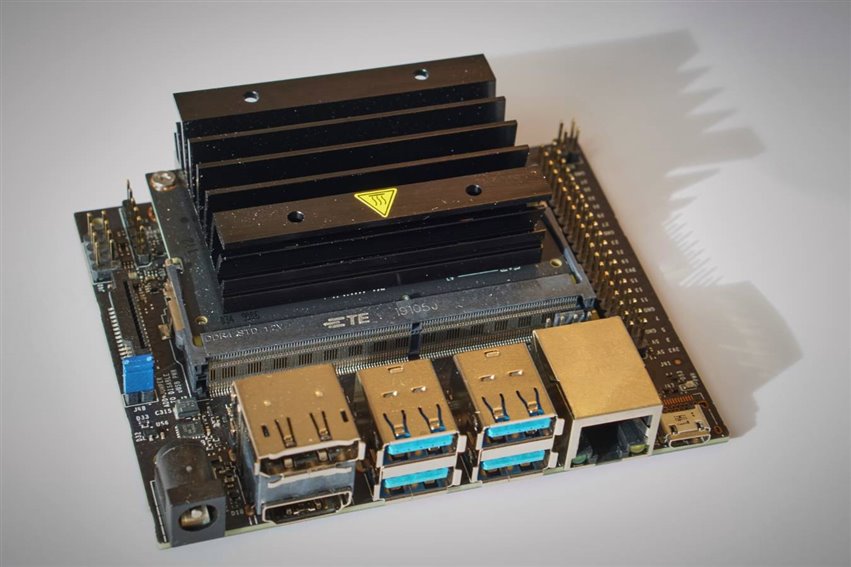
Introduction
The NVIDIA Jetson Nano is a compact board approximately 70x45mm in size, with a large heatsink : ) It's got a very powerful microchip, the NVIDIA Tegra X1, which contains four ARM applications processor cores, as well as 128 graphics processing units (GPU). GPUs are used for more than graphics purposes, because it turns out that some of the interesting applications for computers today, to do with neural networks, which can be used to recognise patterns with ever increasing accuracy, can be created more easily and can perform better as the number of processing units increases. The full version of the Tegra X1 (with twice as many GPU cores) is designed for some quite diverse applications, including gaming but also automotive use, where it can support automated parking, stitching of video from multiple cameras and in-driving assistance (such as lane control, passenger avoidance and driver alertness monitoring).
The Jetson Nano comes as a small outline dual-in-line memory module (SO-DIMM) form-factor, already plugged onto a compact 100x80mm carrier board, together forming the Developer Kit. The carrier board has many typical computer interfaces on it, like USB 3.0, Gigabit Ethernet and video (4k 60fps capable!). There are also connectors that are very similar to those on the Raspberry Pi. There's a 40-way expansion connector that is almost identical in layout to the Pi's connector. A Pi camera is also supported.
I had trouble finding a single resource for the pinout connections, so figured it may be worth having a location here where we can document this. I spent a few hours drawing up some diagrams for future reference. There may be errors, please let me know if anything needs changing. The diagrams are in high-resolution PNG format (click them to enlarge), but I may eventually make some less colorful, printer-friendly PDF versions too, once all the pin connections detail is ok. NVIDIA is yet to release some documentation for the Tegra X1, so today I had to glean the detail from various places, including the Linux source.
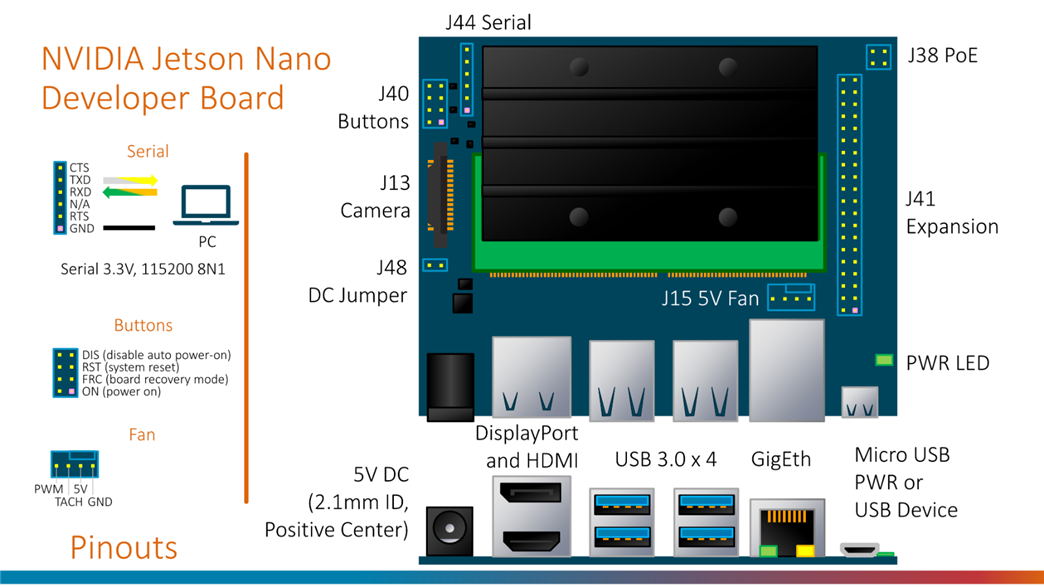
Developer Board Overview Diagram
Pin 1 is marked in pink for the connectors. There is an on-board serial console at connector J44. A third-party USB-UART adaptor is used to connect that to a PC. The colors are shown for Adafruit USB-UART wiring, and for FTDI USB-UART wiring. There is a circuit for a home-made USB-UART adapter here: Building a USB UART Serial Adapter it uses FDI wiring color convention (Yellow, Orange and Black, for RXD, TXD and GND, from the PC end perspective).
The Buttons header will be very handy when fitting things inside a case. I hope to connect a button to the 'ON' pins, and a shorting jumper across the DIS pins to disable auto-startup.
Note that when powering the Jetson Nano from the barrel jack socket, a shorting jumper needs to be placed on J48. Otherwise, the Developer Board expects power from micro USB.
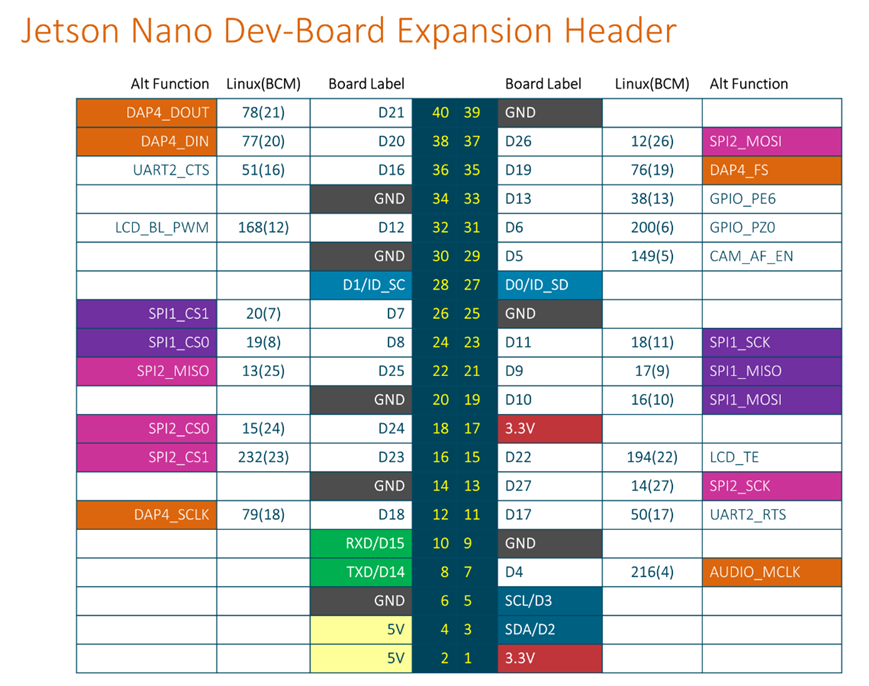
J41 Expansion Header Pinout
Pi enthusiasts will notice the similarity in the pin naming. I've grouped pins using colors, but I still don't know what all the secondary functions of the pins are.
The Linux(BCM) column contains two numbers. The numbers in parenthesis are Raspberry-Pi-like GPIO numbers, so that the same GPIO libraries can be used as the Raspberry Pi.
This table will be updated after NVIDIA release further documentation (expected within weeks I think).
Diagrams for Documentation
Attached to the blog post are some PNG files of the top and side view of the developer kit board with transparent background, possibly useful for documenting projects.
 | |
 |
Top Comments