


Stage 1 completed
This is the first update after the project presentation coinciding with the presence of the PONF project at IFA in Berlin, Sept 3-4 2017.
Milestone goal
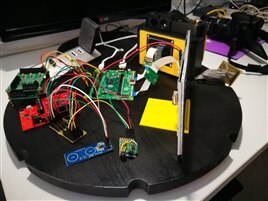
At the actual date while assessing the camera electronic design most of the components are already decided, but not all. This first stage of the project aimed creating a draft of the PONF development platform including at least the essential components to test the features we expect, with special attention to the internal modules connection.
Internal architecture
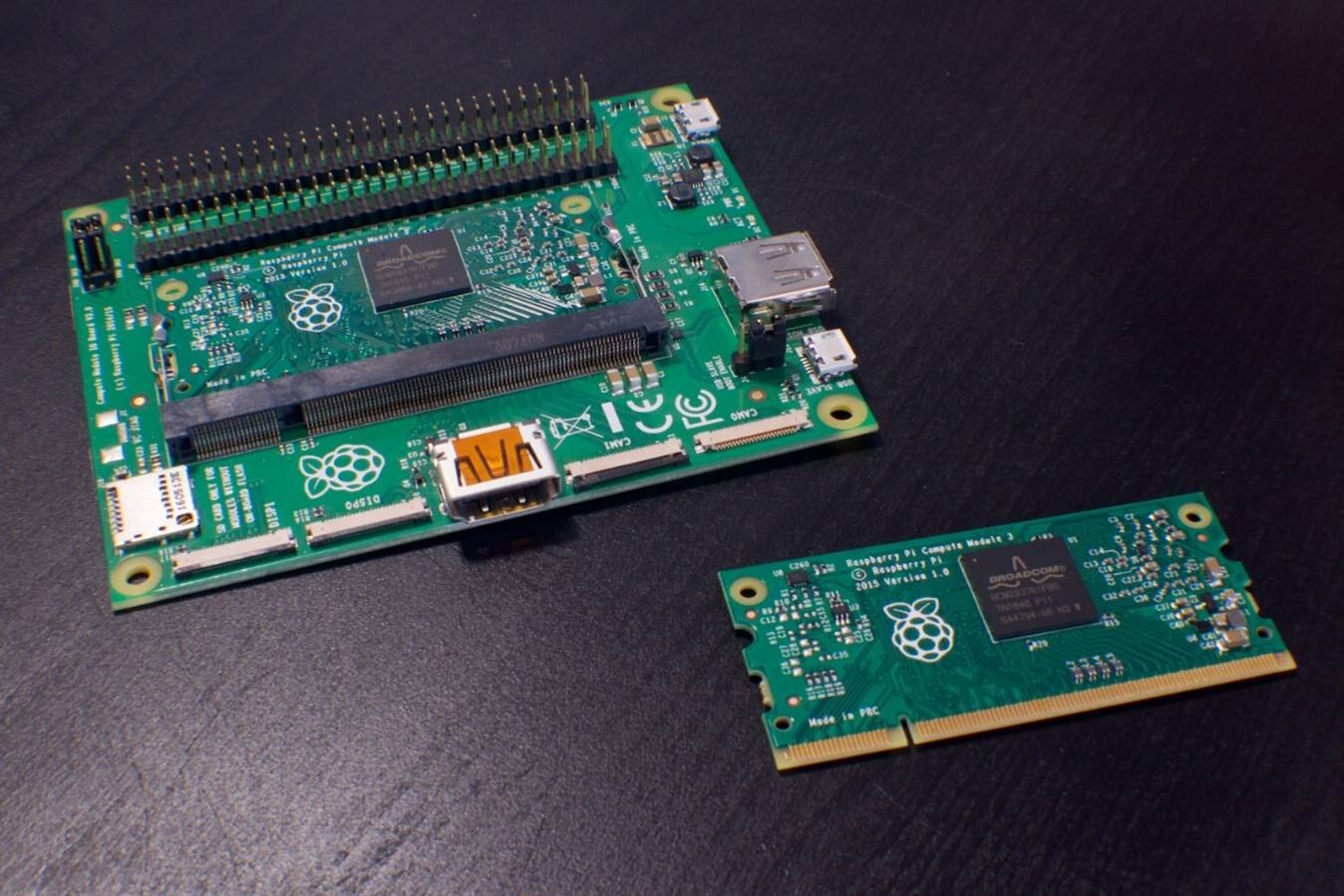
The core of the PONF camera digital back is the Raspberry PI Compute Module 3. This choice gives the device uncommon features: it is a specialised Linux embedded machine but a traditional digital camera as we are used to intend it.
The small and powerful Linux board is only one component of the PONF camera digital back connected to specialised modules through an internal network, based on four main protocols: UART, I2C, SPI and USB. A so organised modular system gives to the device a considerable compute power when it is used as a digital camera. When the back is put in place inside the dock station converts in a reliable desktop device with HDMI output, wireless connectivity and an extra USB hub to connect peripherals like printer, keyboard, mouse, graphic tablet and more.
Compute Module 3 tasks
Acting as a digital camera the Compute Module 3 covers the main role of managing the subprocesses in charge to the connected micro controllers, manage the storage, control the SONY 25 Mp APS-C full frame sensor and the external communication through USB, WiFi and Bluetooth.


Following a similar approach to the Raspberry Pi Desktop the Operating system is installed on the internal 4Gb eMMC of the Compute Module 3 while the rest of the filesystem is installed on a 1Tb SSH. This makes a reliable platform with a lot of storage space for applications and images. In our case for better robustness of the system the Linux filesystem after boot resides on the SSD storage; a 500 Gb version will also be available.


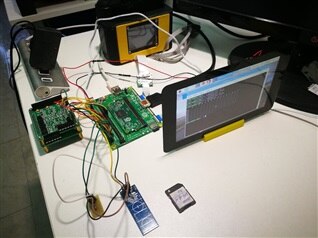
The other important task directly under control of the Compute Module 3 is the visual user interface and related user interacions through two possible choices of touch screen: 7 inches and 5 inches.
In this phase only the 7 inches touch screen has been setup.
Networking
WiFi and Bluetooth modules are also part of the Compute Module Linux setup as well as the optional NFC feature and some user interaction sensors, real time clock and other accessory devices.
Alternatively to connect to a WiFi access point the PONF camera can act also as an access point itself for remote control via WiFi and an internal local web server. As the Linux system can cover without difficult this task it is under development a solution based on the TI Simple Link technology (e.g. the CC3200 Internet on Chip)
The advantage of this approach consists to expose a set of connectivity features also when the system is in standby condition to access essential settings and remotely awake the camera under certain conditions.
GPIO Exposed
Some of the Compute Module 3 GPIO pins will be accessible through a connector for users that want to develop their own external tools, customisation and improvements.
Dependant modules
Connected to the Compute Module 3 there is a series of modules managing complex tasks and filtering undesired states without charging the main processor of too heavy work. The most important aspects that guided the choice of these specialised MPU are speed and power consumption. One of the most important challenges designing the PONF camera consists optimising the modules performance to reduce as much as possible the power consumption in the various operating conditions.
Buttons and direct controls
No mechanical buttons are used. Where a direct control results indispensable like the shot button, the capacitive technology will be used insead.
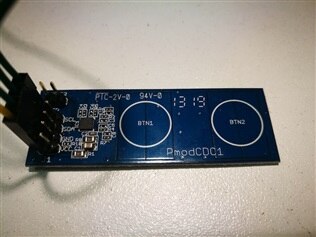
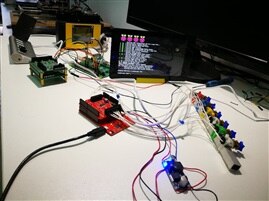
The image above shows a Digilent capacitive button test kit but we are evaluating several options including the Cypress PSoC CapSense technology that seems the most promising for our needs.
Capacitive buttons avoid to expose physical components to risk of damage, humidity, dust etc. and are easier to include in the design; every capacitive button will be associated to a vibrating feedback and the buttons array is controlled by a dedicated MPU acting like a single input/output box.
No matter of how the buttons pattern is configured: when the user press the right one (or the right sequence) the recognised command is sent to the main control unit activating a specific task. When responsiveness and time are strategic factors some buttons generated events can bypass the main control directly enabling the involved module.
Shooting sync unit
A shoot in a camera may involve synching of many elements than those we can imagine. Mirror and shutter should be synched, but also flash and / or ring light or external lights should be if used.
The shot involves a motorised mechanism (the motor shutter) and the mirror opening, frequently using a solenoid. Depending on the shooting conditions (exposure time, single or continue shooting etc.) there are different settings be controlled. The entire set of shooting event will be in charge to an Infineon XMC1100 micro controller, while the mechanical parts are managed by a DC motor (and solenoid) low power controller TLE94112 . Thanks to this shooting strategy only a short command is sent by the system to the module and just a small sequence of bits should be sent back. The Compute Module 3 instead control the sensor image data acquisition and the storage process.
For continuous shooting optimisation the sequence of acquired images is not saved immediately on the SSD storage (that maybe relatively slow in this case) but is saved before on the internal eMMC flash. It is a background process that take in charge the task of moving the images to the final SSS storage support. Considering that at least 1Gb will be available for this task on the internal flash, this means we expect fast and continuous shooting will be significantly improved respect the typical few seconds available on other DSLR cameras.
Robotics
With the introduction of the most recent generation of digital cameras, photography also cover the creation of time-lapse and stop-motion video sequences. In most of the cases the traditional tripod maybe a limitation creating fluid motion sequences; the currently followed approach is the integration of the DSLR camera as-is to external, expensive accessories like tilt-pan controllers, rotating platforms, sliders etc. Based on the the four-axes high precision stepper motor controller Pulse Train Hat the PONF camera reverts this approach. It is the camera itself that can be programmed and configured natively to control a set of motion components without the need of any external processing, calculation or synchronisation.
Previous article
Introducing the PONF project: the first open multi-back DSLR camera
Top Comments