


This week I was traveling again, so unfortunately I didn't have much time to work on the project.
Therefore I will share my thoughts on how to synchronize the two cameras.
Previous posts:
[Pi IoT] Plant Health Camera #6 - Putting the slave Pi to work
[Pi IoT] Plant Health Camera #5 - OpenCV
[Pi IoT] Plant Health Camera #4 - Putting the parts together
[Pi IoT] Plant Health Camera #3 - First steps
[Pi IoT] Plant Health Camera #2 - Unboxing
[Pi IoT] Plant Health Camera #1 - Application
Intro
In the previous post I explained how the two cameras are combined, using the master and slave Pi. Here I will show how the two Pi's are connected hardware wise, and how the two images are taken simultaneously from the two systems.
Hardware setup
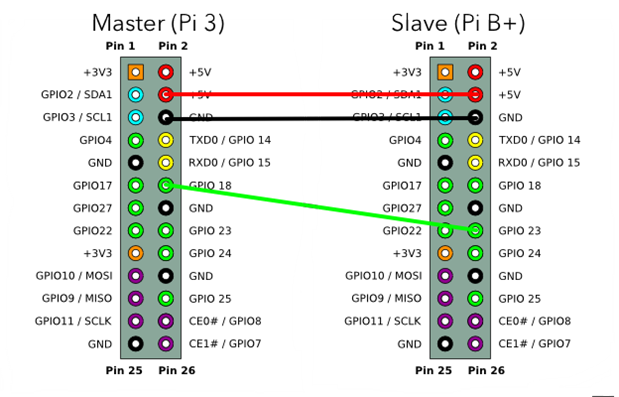
The power for the Pi B+ comes from the Pi 3's header block, as shown in the image below.
I wrote some python code which will run on the slave system. It will wait for a trigger pulse on GPIO 23 and then take an image and save it on the share as described in the previous post. The master system will output the trigger on GPIO 18.
Software
Below is the python code which runs on the slave system, it is based on an example I found on the internet (camera - Problems triggering via GPIO - Raspberry Pi Stack Exchange).
If not done already rip.gpio needs to be installed:
sudo apt-get install python-dev python-rpi.gpio
slave_camera.py:
#!/usr/bin/python
import RPi.GPIO as GPIO
import socket
import time
import picamera
# PiCamera Setup
camera = picamera.PiCamera()
camera.ISO = 100
image_num = 1
ready = 1
# GPIO Setup
GPIO.setmode(GPIO.BCM)
GPIO.setup(23, GPIO.IN, pull_up_down = GPIO.PUD_DOWN)
# Begin Loop
try:
while True:
if GPIO.input(23):
camera.capture('/home/pi/planthealthcam/slave_image.jpg')
print('input from master on gpio 23, Picture taken!')
ready = 1
image_num += 1
time.sleep(3)
except KeyboardInterrupt: # trap a CTRL+C keyboard interrupt
GPIO.cleanup() # resets all GPIO ports used by this program
In order to start this script on every boot, I added it to /etc/rc.local:
#!/bin/sh -e # # rc.local # # This script is executed at the end of each multiuser runlevel. # Make sure that the script will "exit 0" on success or any other # value on error. # # In order to enable or disable this script just change the execution # bits. # # By default this script does nothing. # Print the IP address _IP=$(hostname -I) || true if [ "$_IP" ]; then printf "My IP address is %s\n" "$_IP" fi python /home/pi/planthealthcam/slave_camera.py & exit 0
In a following post I will describe the python code on the master system.
stay tuned.
Top Comments
-

tonyteyer
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Comment-

tonyteyer
-
Cancel
-
Vote Up
0
Vote Down
-
-
Sign in to reply
-
More
-
Cancel
Children