


Really did a last minute rush to complete it, although very much scaled down in term of operation from what i originally envision
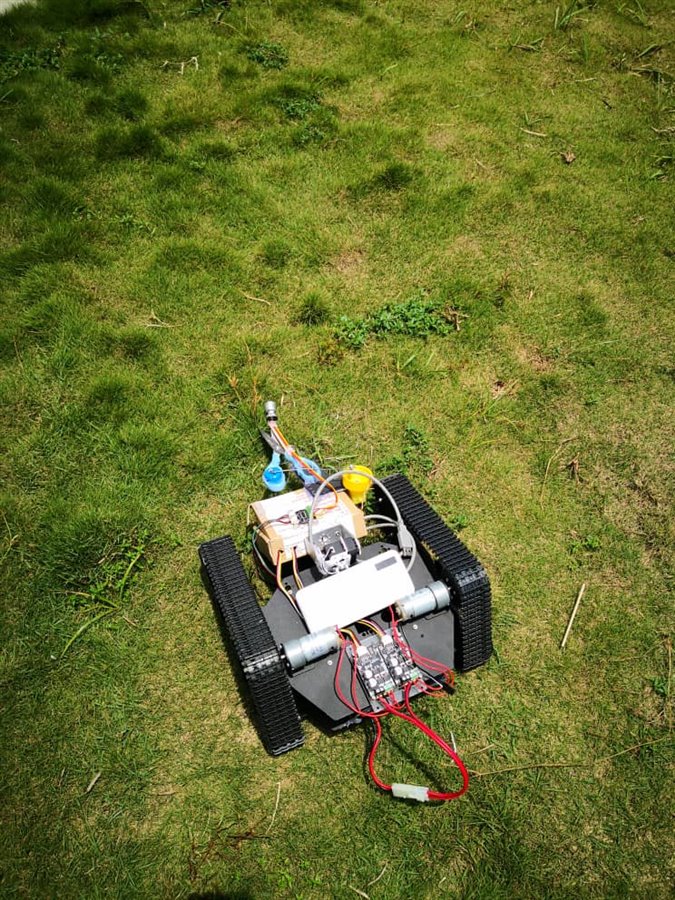
The bot with power bank to power up the Nucleo, load cell and Hx711 based board that utilize the load cell FX1901
the board is SEN0160
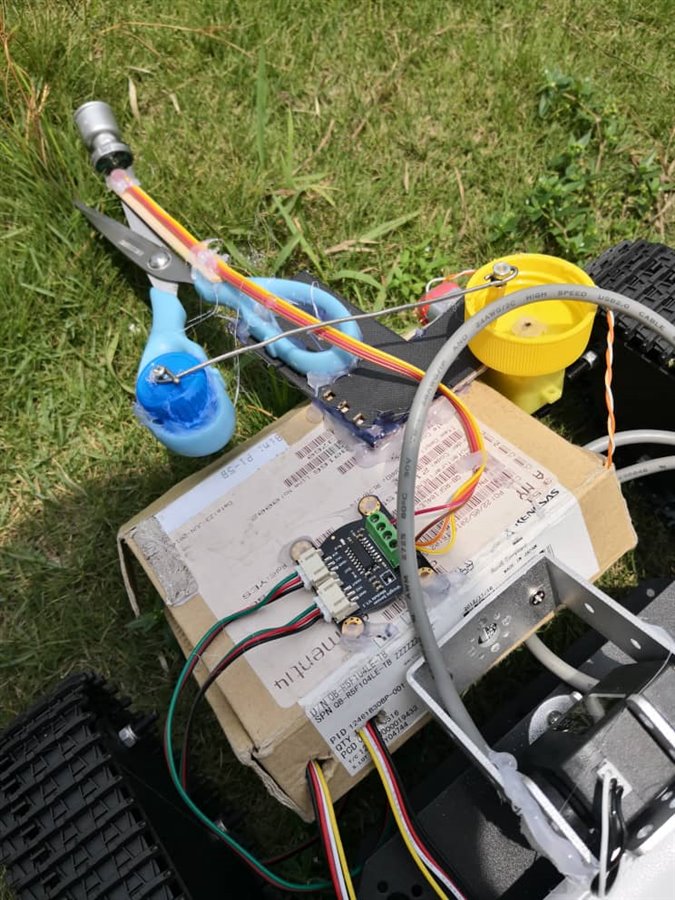
load cell FX1901 is mount in front of the scissor to sense any grass (hitting a big enough weed will give a reading to load cell)
The load cell is glued to an ice cream stick to extend it all the way up to the end. And a shampoo cap is mounted in front as 'finger'
see its testing in house at the video towards the end at Sensortile-Automatic Weeding Robot #14

it is a bit challenging to take video on the few occasion when it is actually working this video shows testing without the front portion attached properly
What is working
it can run on grass with the 13A motor driver
sometimes the scissor successfully cut grass according to logic (sense grass only cut)
Shortfall
-it can run on grass but doesn't really follow any good logic. it just go ahead, sense the grass, and cut. Problem, is success rate is also 50% at best. the scissor easily runs out of power (due to driving it with F411RE pin)
-it cannot differentiate whether it is touching a grass or plant (well, originally i want to use camera to do that)...but lack of time
-the motorized scissor is too heavy, so i got to fix the entire RC servo with glue to hold it in certain position
-not manage to use SensorTile to connect directly (non BLE) to Nucleo
Summary
-underestimated the SensorTile complexity and spent the last week trying to connect directly to the F411RE. Have to abandon SensorTile. Originally want to use the gyro to sense the tilting angle of the scissor (controlled with RC servo).
-Printed circuit board is a much better approach going forward
-too many glue based creation making the bot pretty fragile. If really go a 3D printer, can print out some components like battery holder, scissor holder, sensor holder...etc
-battery drain is relatively fast
-wish to have one more week ....haha....typically engineer rush mindset
-i have known how to write in MBED (migrated from arduino), thought it is a really good platform and want to try it more in future. Thanks that i still have the Nucleo and its many resources to rely on going forward
as i explore the sensorTile in the last weeks, i realize it is really powerful, even have some example on AI. Will spend time to do it in the future.
I also received enormous amount of suggestion and encouragement from element14 members and other challengers. It is an intuitive fun experience which i want to continue on.
I am really thankful for Element14, ST Microelectronics and TE Connectivity selecting me for this challenge, though i felt i haven't met my goal ..
All my blogs
15 this one--> Automatic Weeding Robot - Final Countdown - Blog #15
Sensortile-Automatic Weeding Robot #14
Motor control with Nucleo-F411RE-Automatic Weeding Robot #13
Programming Nucleo-F411RE with MBED- Automatic Weeding Robot #12
Testing the nucleo-64 and connecting it to motor driver - Automatic Weeding Robot #11
motorized scissor cutting weed - Automatic Weeding Robot #10
motor sizing for scissor- Automatic weeding robot #9
running with MCU controlled motor driver - Automatic Weeding Robot #8
It is running on the playground - Automatic Weeding Robot #7
Motor driver testing with bench top power supply - Automatic Weeding Robot #6
13A capable motor driver - Automatic Weeding Robot #5
Is this motor powerful enough to run the chasis? -Automatic Weeding Robot #4