


Blog List:
Garbage Collector #1 Introduction
Garbage Collector #2 Clamp testing
Garbage Collector #3 Seeking help from Infineon's Technical Supports
Garbage Collector #4 Some basic interactions with the shields
Garbage Collector #5 Base testing
Garbage Collector #6 Wireless Controller
Garbage Collector #7 Clamp and Base
Garbage Collector #8 Clamp Improvement
Garbage Collector #9 Doubling the maximum current
Garbage Collector #10 Summary
In my previous post, I have faced some problems where my clamp is not strong enough and also some jitter in my servo motor. Thanks to the suggestion from the members of Element14 Community, I was able to solve it by the following steps:
Clamp not strong issue workaround:
i) Adding rubbery surface as per suggested by the members of Element14 Community:

ii) Use hot glue gun to fix the shaft and the gear:

iii) Let clamp to continue applying a smaller force instead of completely stopping after successfully clamp the target:

Note that I'm using a 360-degree servo motor for clamping so the PWM duty cycle is to determine the direction and the force of the servo motor, unlike the normal 180-degree servo motor which uses the PWM duty cycle to determine the angle.
Here I programmed the servo motor to continue turning inward but with a smaller force after the button is released so that it will continue to apply force to hold the target.
Servo motor jitter issue workaround:
i) Setting multiple waypoints with delays in between:
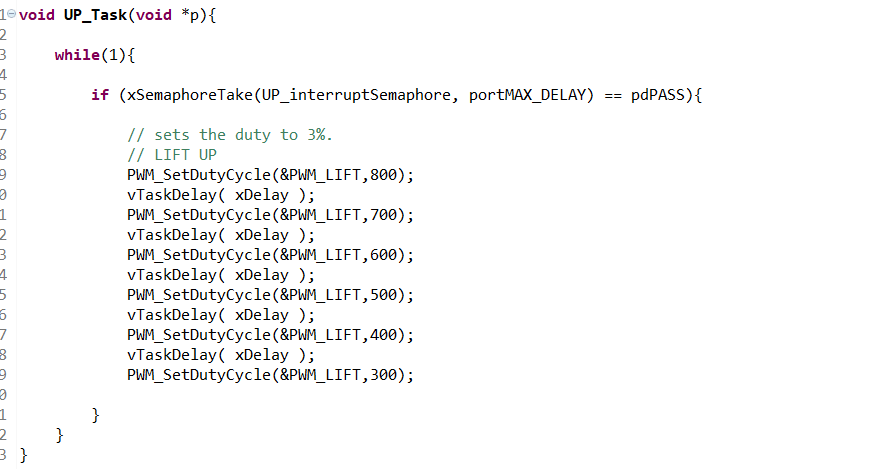
Note that this servo motor is a 270-degree servo motor that will use the PWM duty cycle to determine its angle.
ii) Adding Ferrite core to the servo motor's wire.
I actually got this idea from the YouTube video below which demonstrates how adding a Ferrite core helps in solving the jitter issue:


adding the Ferrite core.
I have also added a compartment to the bin so that it can keep metals and non-metals item separately:

I have updated the GitHub files in the following link: https://github.com/wanfp97/GarbageCollector
After adding all these things to the Garbage Collector, the Garbage Collector gets too heavy and move too slow. I have managed to solve it but adding it to this blog post will make this post too long so I will just put it in my next blog post.
I will let you guys see the working video after I solve these issues:
in this video, the second target didn't get in the bin as intended. I will try to make some adjustments to resolve this issue.
That's all for this blog, see you next blog.