


Test Driving the BeagleBone Blue RTV

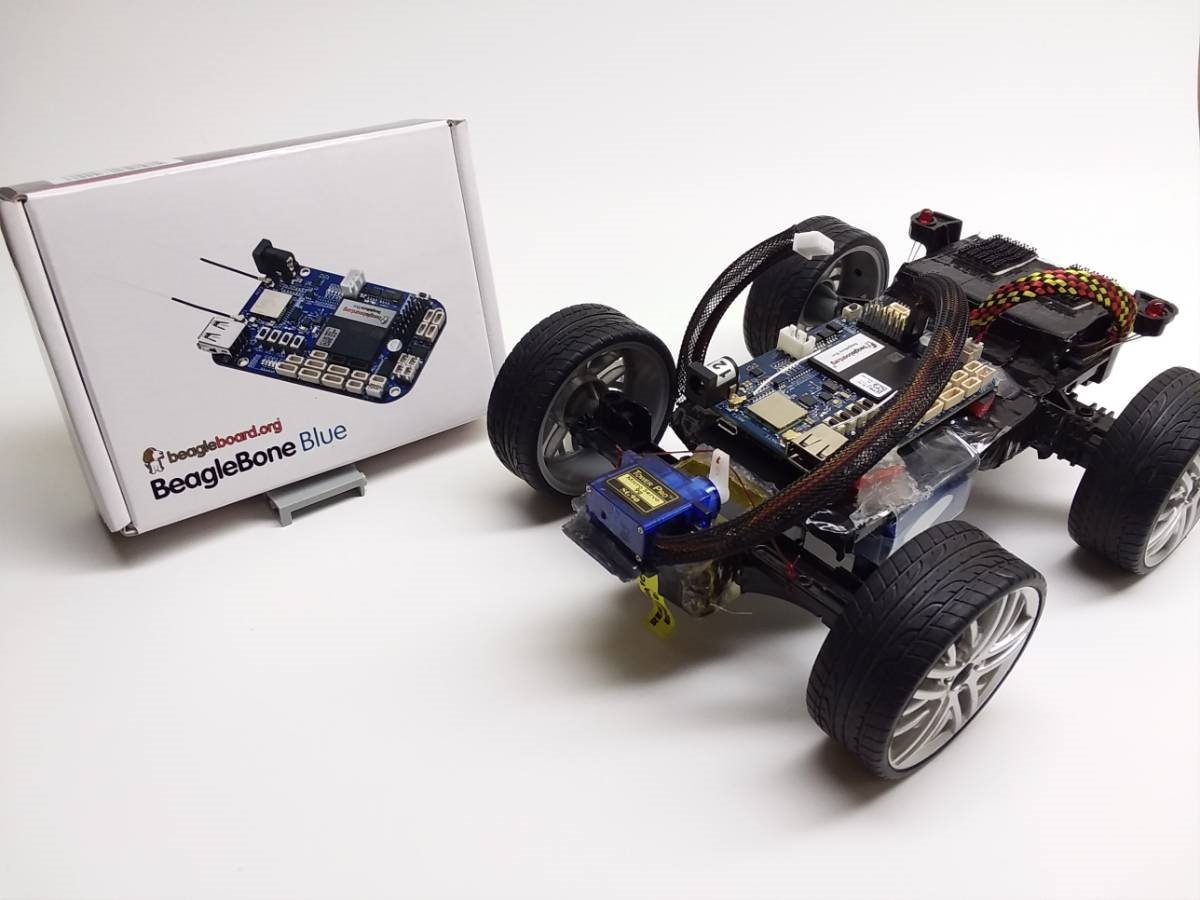
The BeagleBone Blue Road Test Vehicle. This test vehicle is powered by the BeagleBone Blue and was constructed from lightweight and cost effective recycled materials.
The BeagleBone Blue is ready to go. https://beagleboard.org/blue
Available at http://www.newark.com/beagleboard/bbone-blue/beaglebone-blue-robotics-platform/dp/95Y0640?st=beaglebone%20blue
What is BeagleBone Blue?
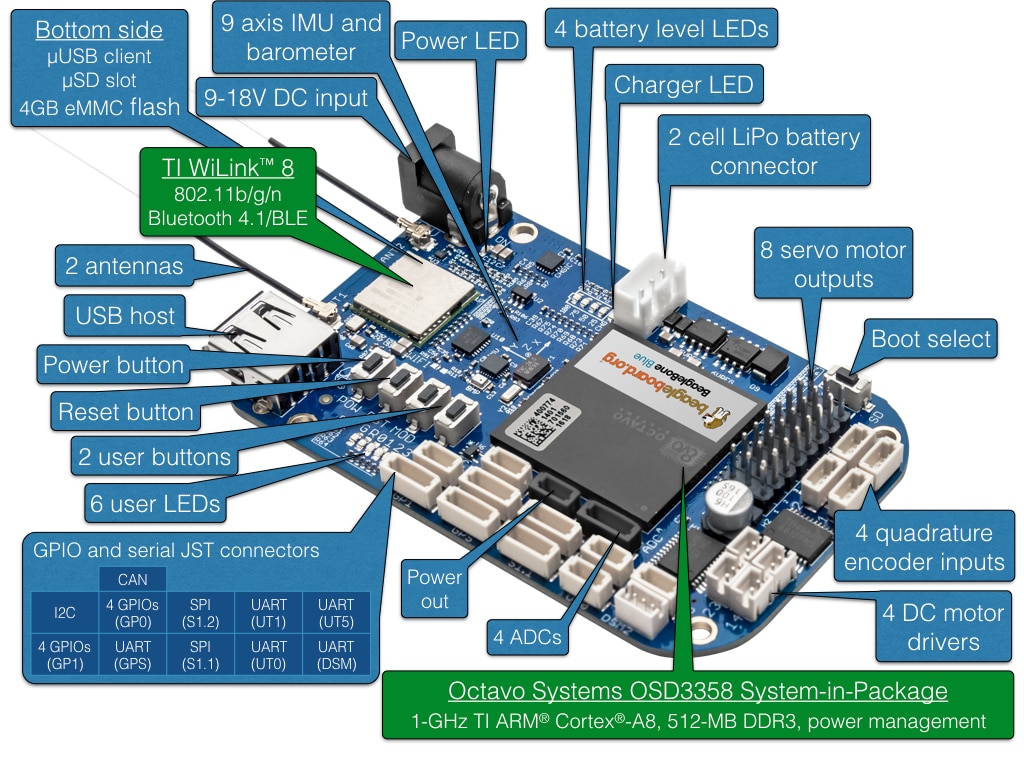
BeagleBone Blue is a complete, Linux-enabled robotics computer. Community-supported and fully open-source, the real-time performance, flexible networking and rich set of robotics-oriented peripherals make building mobile robots quick and affordable.
Processor: Octavo Systems OSD3358 1GHz ARM Cortex-A8
Cortex-A8
- 512MB DDR3 RAM integrated
- Integrated power management
- 2×32-bit 200-MHz programmable real-time units (PRUs)
- ARM Cortex-M3
- On-board 4GB 8-bit eMMC flash storage programmed with Debian Linux
Connectivity and sensors
- Battery: 2-cell LiPo support with balancing, 9-18V charger input
- Wireless: 802.11bgn, Bluetooth 4.1 and BLE
- Motor control: 8 6V servo out, 4 DC motor out, 4 quadrature encoder in
- Sensors: 9 axis IMU, barometer
- Connectivity: HighSpeed USB 2.0 client and host
- User interface: 11 user programmable LEDs, 2 user programmable buttons
- Easy connect interfaces for adding additional sensors such as: GPS, DSM2 radio, UARTs, SPI, I2C, 1.8V analog, 3.3V GPIOs
The chassis is composed of layers of scrap PETE, ABS, Lexan and project foam board bound by strips of black Duck Tape. The front steering assembly and rear drivetrain were salvaged from a RC Truck. These materials were recycled from the scraps of previous projects.
Additional parts

2S1P LiPo Battery with 3-wire JST-XH (2.5mm pitch) charge connection
https://hobbyking.com/en_us/turnigy-1600mah-2s-20c-losi-mini-sct-pack-part-losb1212.html
Tower Pro SG92R Micro Servo
https://www.adafruit.com/product/169

2-wire JST-ZH (1.5mm pitch) Wire Jumper Connection
30 SETS JST ZH 1.5MM 2 Pin Female Single Connector with Flat Wires 150MM 28AWG
https://www.amazon.com/gp/product/B0738CV1LP/ref=oh_aui_detailpage_o01_s01?ie=UTF8&psc=1
OS Image and Software API
This BB Blue is running the latest Debian Stretch IoT Image and the Robotics Hardware API (libroboticscape).
Debian Stretch IoT Image
https://beagleboard.org/latest-images
Robotics Hardware API (libroboticscape)
http://www.strawsondesign.com/#!manual-install
Previous blog posts related to this post
BeagleBone Blue Pan Tilt Servo Test
Beaglebone Blue Road Test Vehicle
BB Blue Pan Tilt Servo Lipo Battery Test
BeagleBone Blue - Drive Motor and Steering Servo Tests
These tests were run at 100% of the BeagleBone Blue's available motor driver power.
There are some minor issues with steering and loss of traction.
Thanks for stopping by.
Stay tuned for updates.
Trent
Top Comments