










|
The Pico has a set of PIO co-processors. They are real-time controllers that can execute logic with deterministic timing. Ideal to run strict-timed sequences and state machines. And to implement extra peripherals.
|
PIO allows the Pico to run the motor off-line, while the ARM cores (if you are using a Pico2, maybe the RISC cores?) do something else. You tell PIO what to do, and that's it. It 'll control the steps. At least, that's the goal of this exercise. I did something similar a few years ago with a TI Hercules µController.
Hardware Provisioning
|
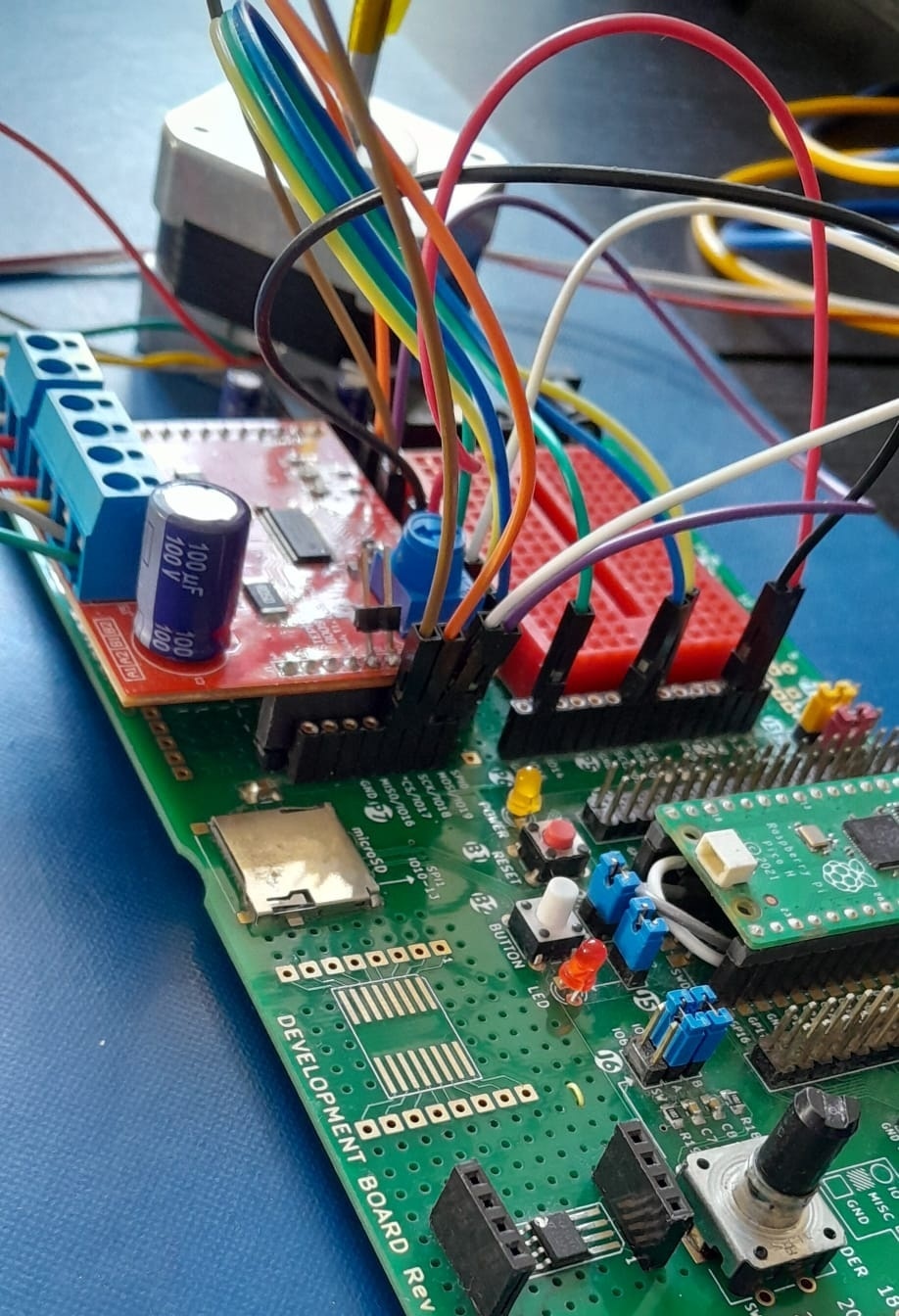
For this blog series, I'm using TI's BoosterPack for the DRV8711, with shabaz' PICO-EUROCARD. The design will work for any Pico in combination with the DRV8711 . The motor is ADAFRUIT - 324 . |
Resources needed:
- sleep, DIR and STEP pins
- a SPI channel (note: the DRV8711 has active high CS)
These are the Pico resources I reserve:
| signal | DRV8711 | Pico |
| SPI CLK | SCLK | CLK |
| SPI CS | SCS | IO17* |
| SPI MISO | SDATO | MISO** |
| SPI MOSI | SDATI | MOSI |
| direction | DIR |
IO4 |
| step | STEP |
IO5 |
| sleep | SLEEP |
IO14 |
| reset | nRESET |
IO15 |
| power |
3V3 |
|
| ground |
GND |
I have allocated the SPI channels. All other pins are GPIO. I will allocate them while writing the firmware, and update this bog.
* DRV8711 uses a chip select that's active high. Pico's SPI library doesn't support that, so I will bit bang that pin.
** DRV8711 outputs are open drain. The Pico will have to provide power via pull-ups..
In the next post I'll set up the SPI communication. After that, we 'll dig into the PIO state machine.
